
一种机器人手臂用夹持装置.pdf

努力****梓颖

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人手臂用夹持装置.pdf
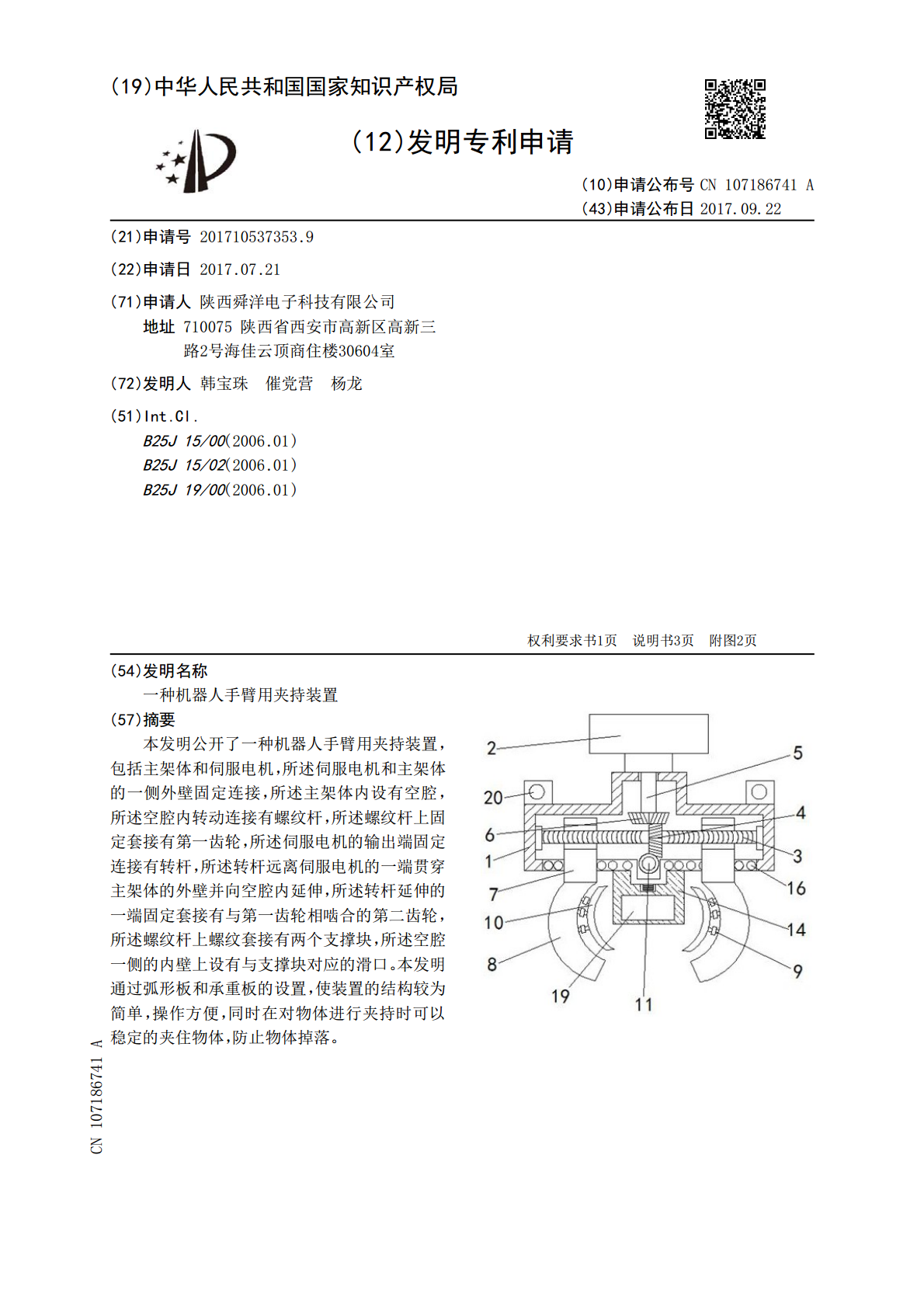
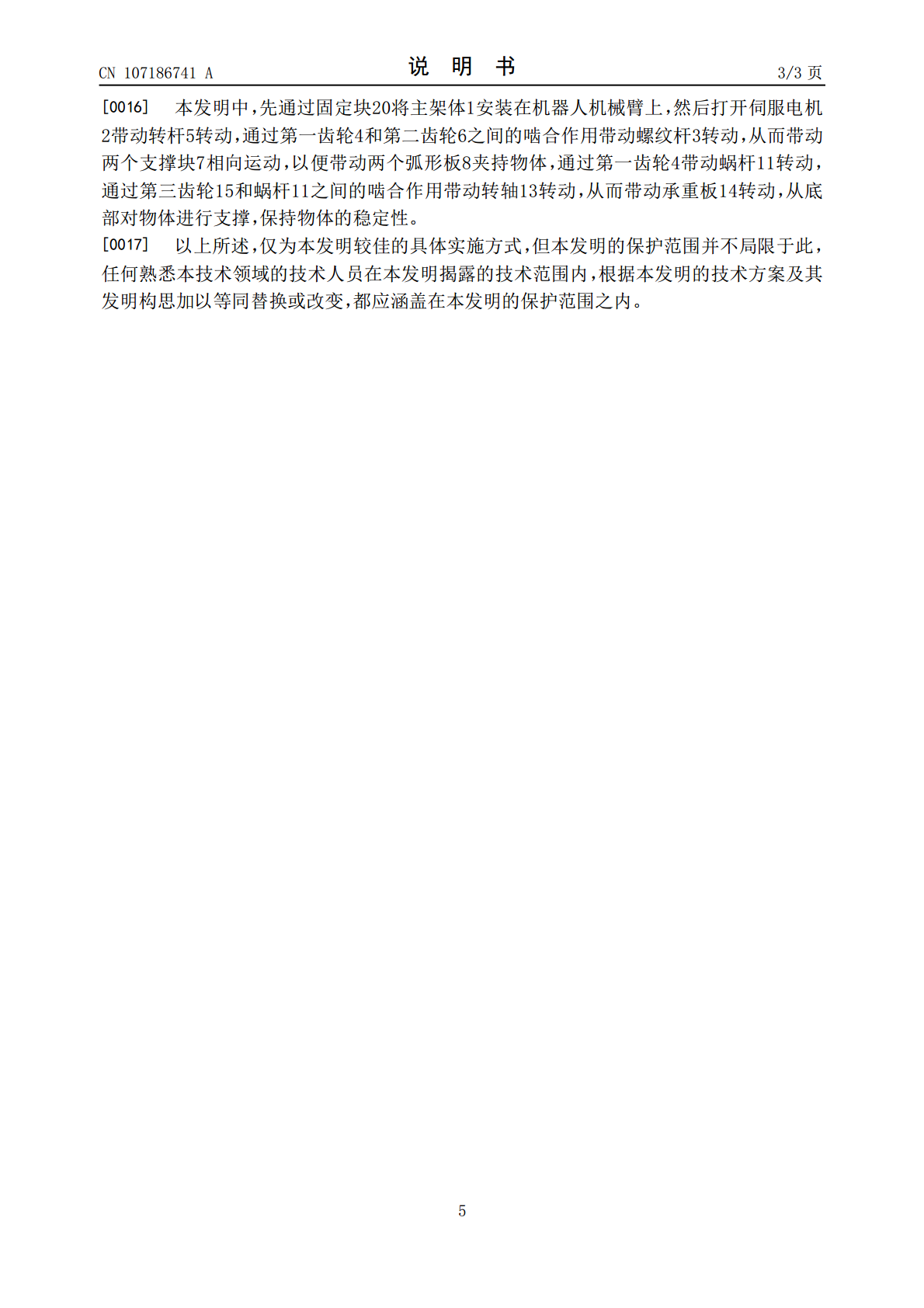
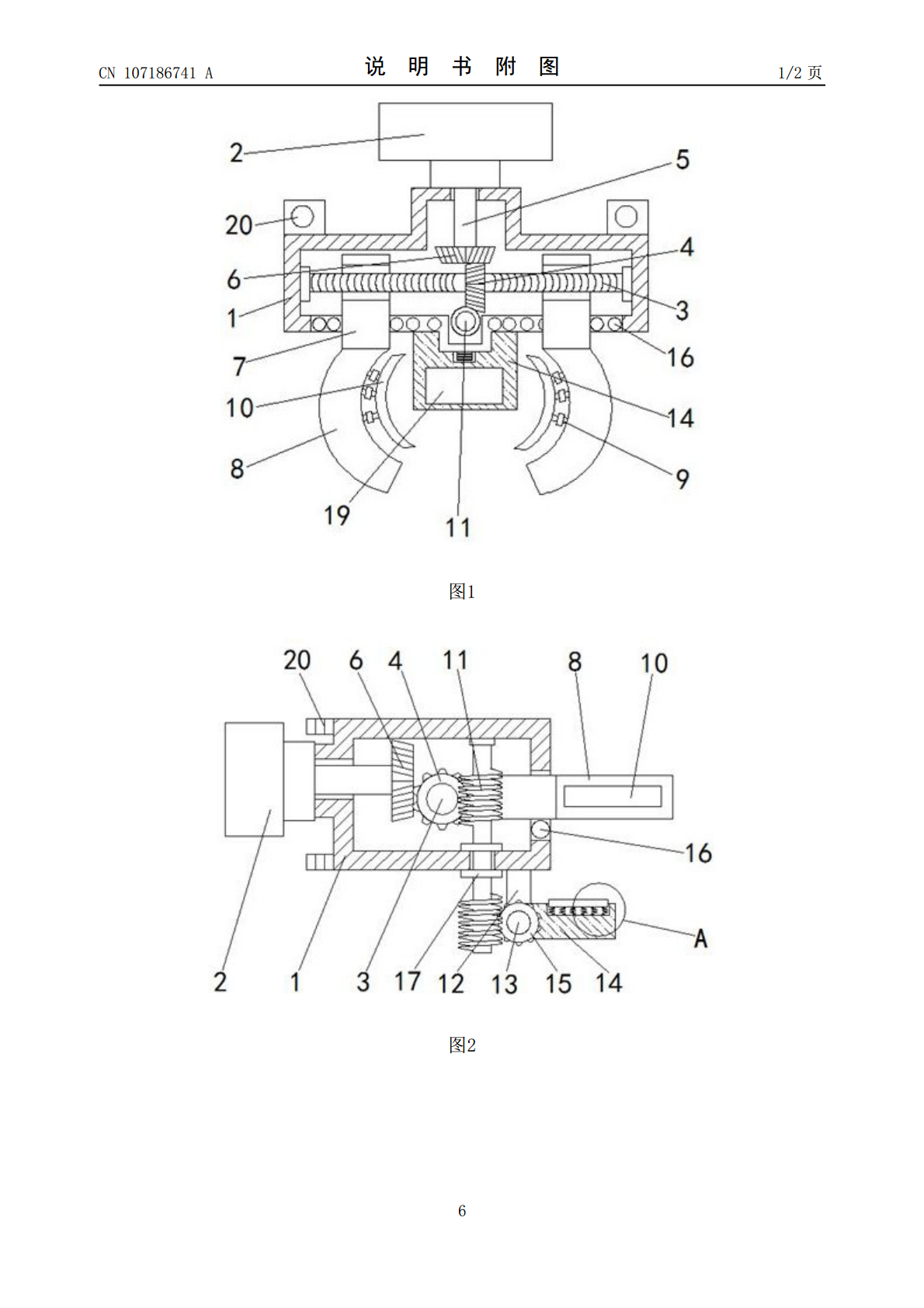
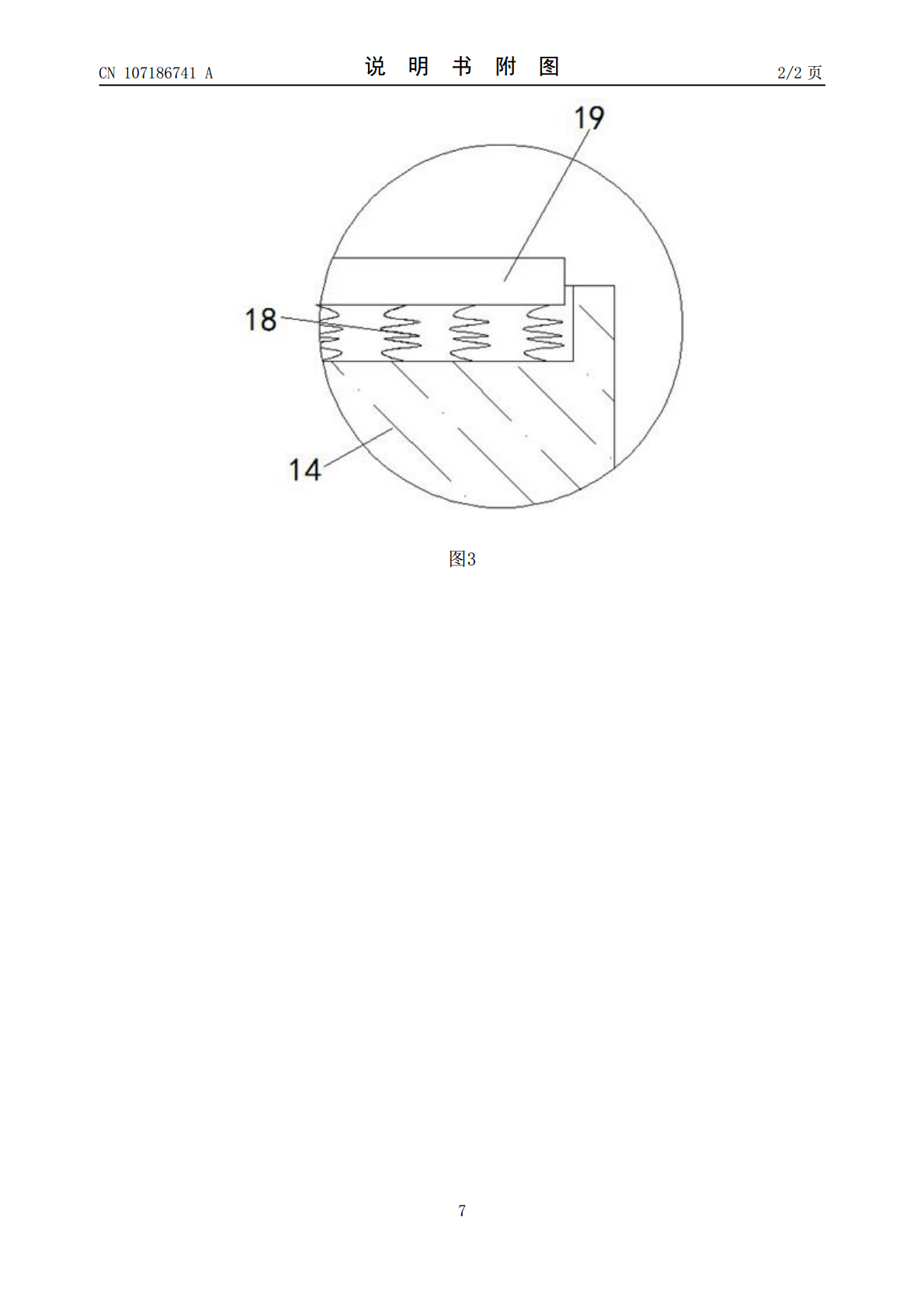
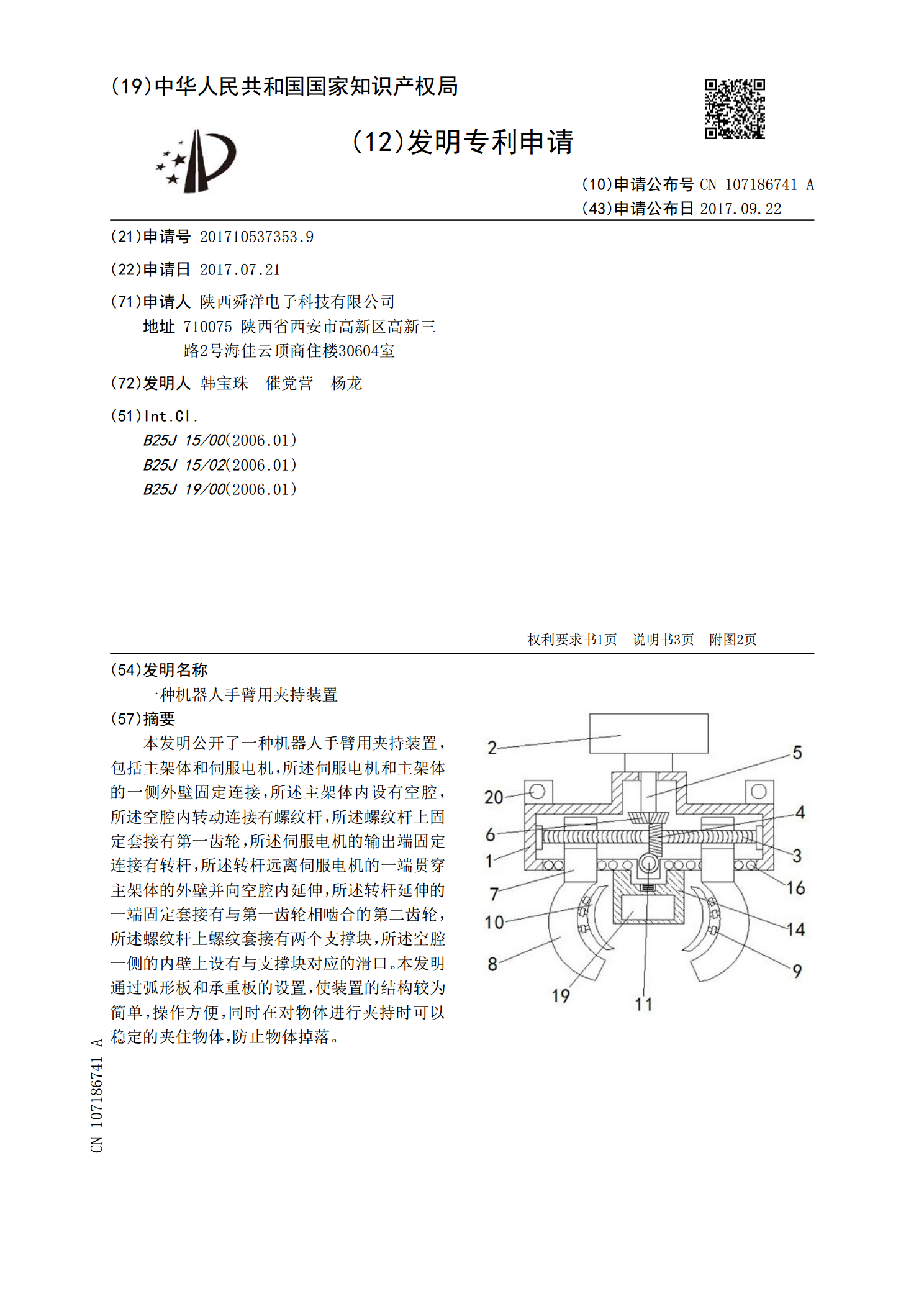
本发明公开了一种机器人手臂用夹持装置,包括主架体和伺服电机,所述伺服电机和主架体的一侧外壁固定连接,所述主架体内设有空腔,所述空腔内转动连接有螺纹杆,所述螺纹杆上固定套接有第一齿轮,所述伺服电机的输出端固定连接有转杆,所述转杆远离伺服电机的一端贯穿主架体的外壁并向空腔内延伸,所述转杆延伸的一端固定套接有与第一齿轮相啮合的第二齿轮,所述螺纹杆上螺纹套接有两个支撑块,所述空腔一侧的内壁上设有与支撑块对应的滑口。本发明通过弧形板和承重板的设置,使装置的结构较为简单,操作方便,同时在对物体进行夹持时可以稳定的夹住
一种物流搬运机器人用的防滑固定夹持手臂装置.pdf
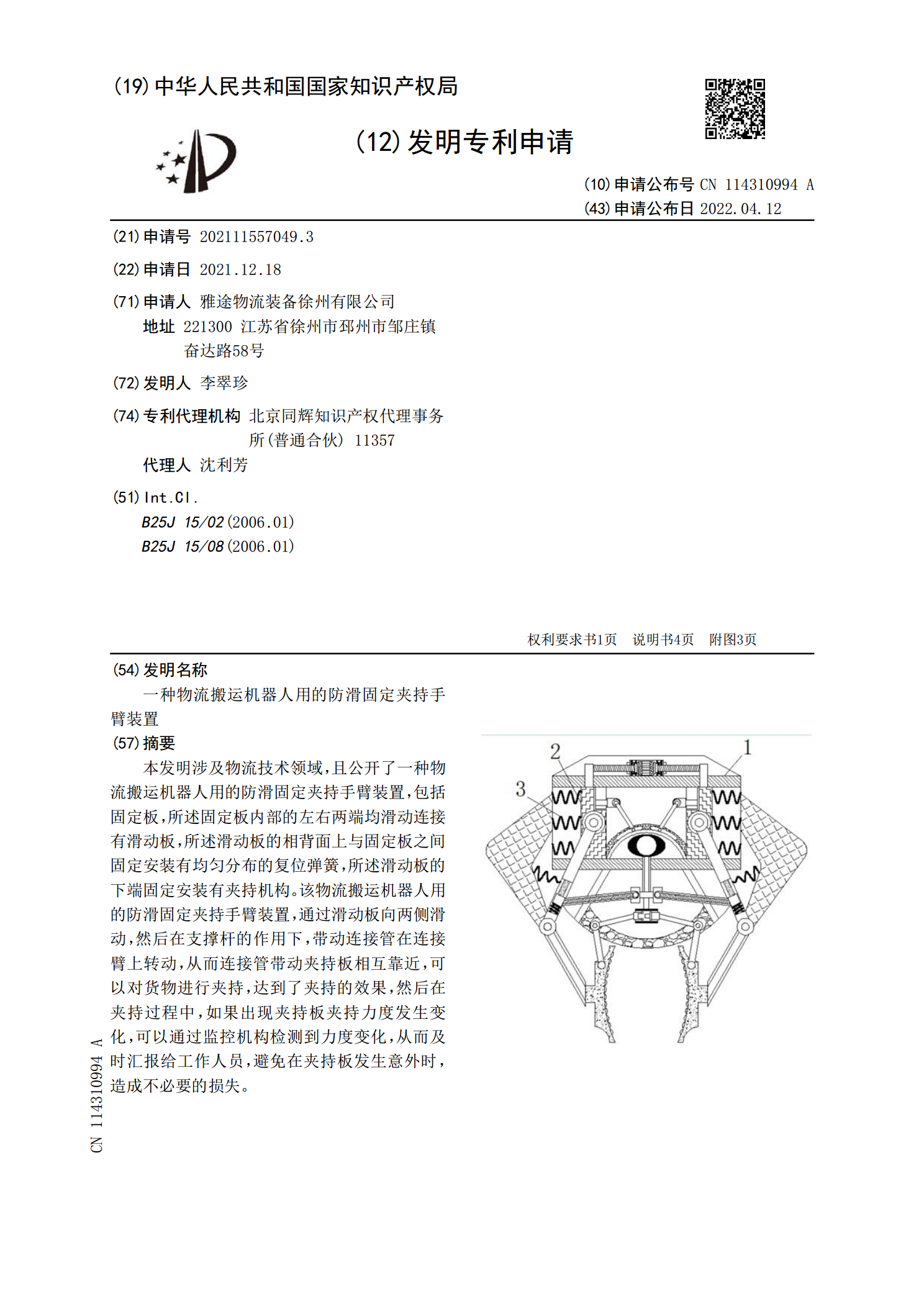
本发明涉及物流技术领域,且公开了一种物流搬运机器人用的防滑固定夹持手臂装置,包括固定板,所述固定板内部的左右两端均滑动连接有滑动板,所述滑动板的相背面上与固定板之间固定安装有均匀分布的复位弹簧,所述滑动板的下端固定安装有夹持机构。该物流搬运机器人用的防滑固定夹持手臂装置,通过滑动板向两侧滑动,然后在支撑杆的作用下,带动连接管在连接臂上转动,从而连接管带动夹持板相互靠近,可以对货物进行夹持,达到了夹持的效果,然后在夹持过程中,如果出现夹持板夹持力度发生变化,可以通过监控机构检测到力度变化,从而及时汇报给工作
一种机械手臂用椭圆夹持装置.pdf
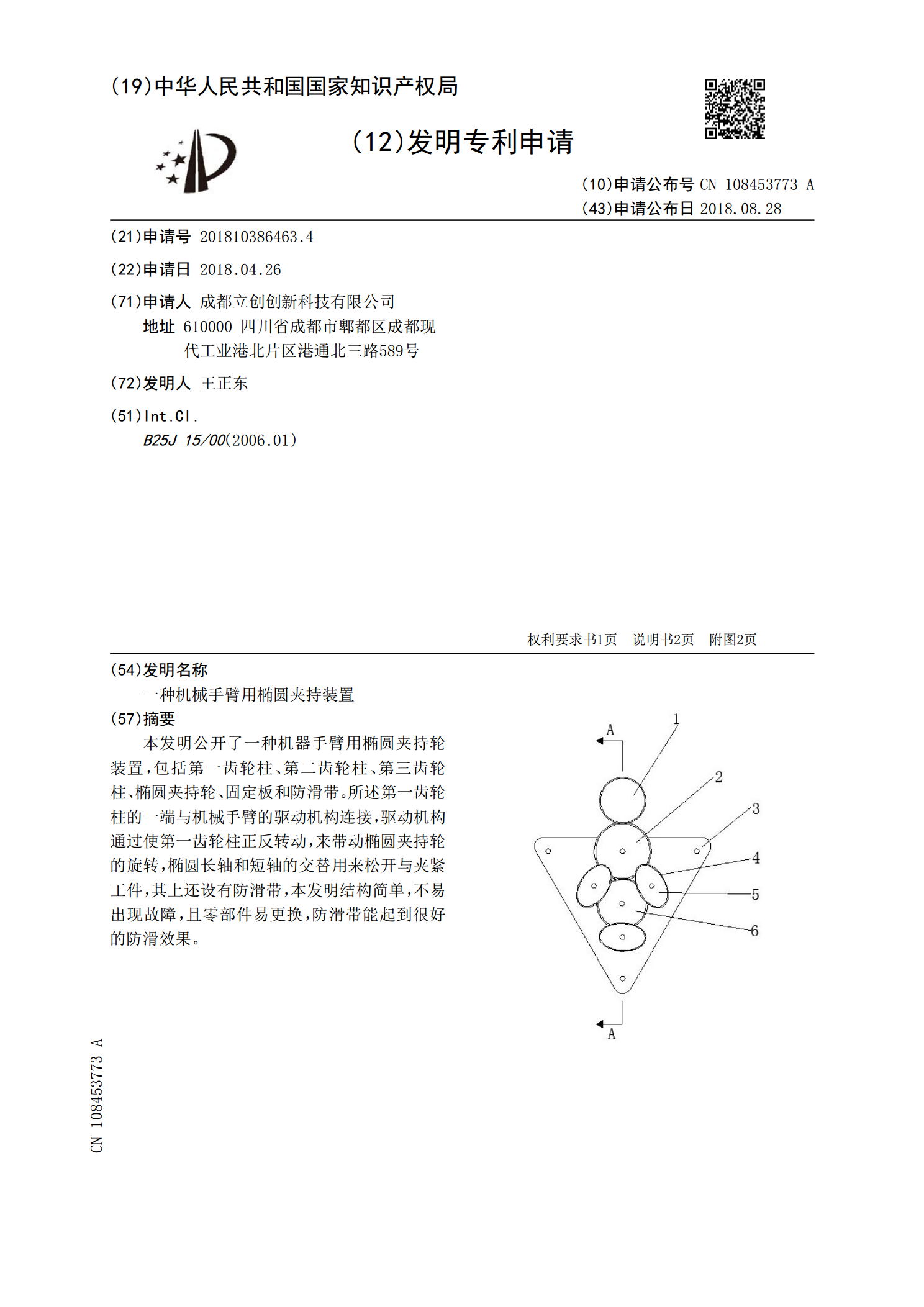
本发明公开了一种机器手臂用椭圆夹持轮装置,包括第一齿轮柱、第二齿轮柱、第三齿轮柱、椭圆夹持轮、固定板和防滑带。所述第一齿轮柱的一端与机械手臂的驱动机构连接,驱动机构通过使第一齿轮柱正反转动,来带动椭圆夹持轮的旋转,椭圆长轴和短轴的交替用来松开与夹紧工件,其上还设有防滑带,本发明结构简单,不易出现故障,且零部件易更换,防滑带能起到很好的防滑效果。
一种机器人用夹持装置.pdf
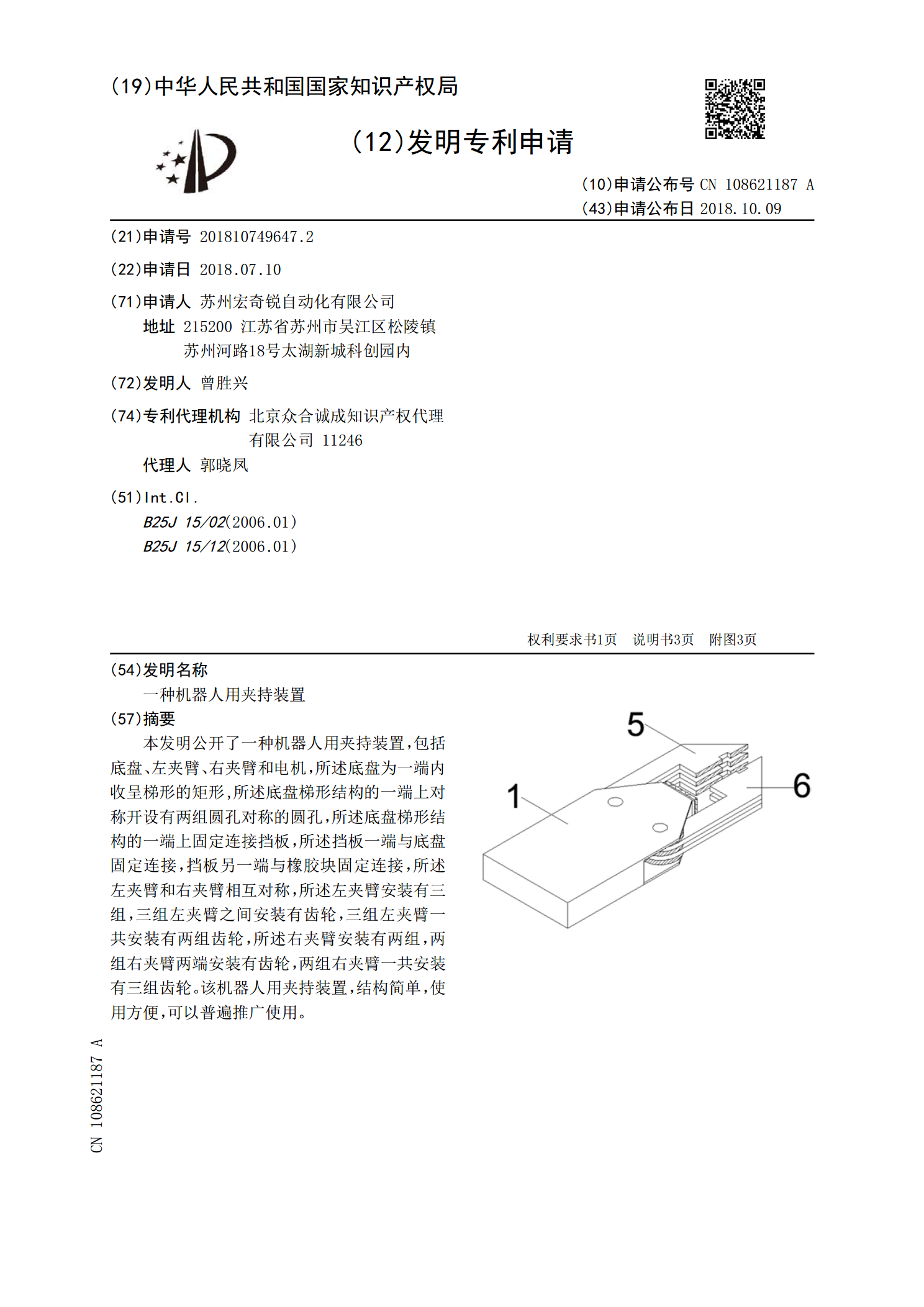
本发明公开了一种机器人用夹持装置,包括底盘、左夹臂、右夹臂和电机,所述底盘为一端内收呈梯形的矩形,所述底盘梯形结构的一端上对称开设有两组圆孔对称的圆孔,所述底盘梯形结构的一端上固定连接挡板,所述挡板一端与底盘固定连接,挡板另一端与橡胶块固定连接,所述左夹臂和右夹臂相互对称,所述左夹臂安装有三组,三组左夹臂之间安装有齿轮,三组左夹臂一共安装有两组齿轮,所述右夹臂安装有两组,两组右夹臂两端安装有齿轮,两组右夹臂一共安装有三组齿轮。该机器人用夹持装置,结构简单,使用方便,可以普遍推广使用。
一种工业机器人用夹持装置.pdf
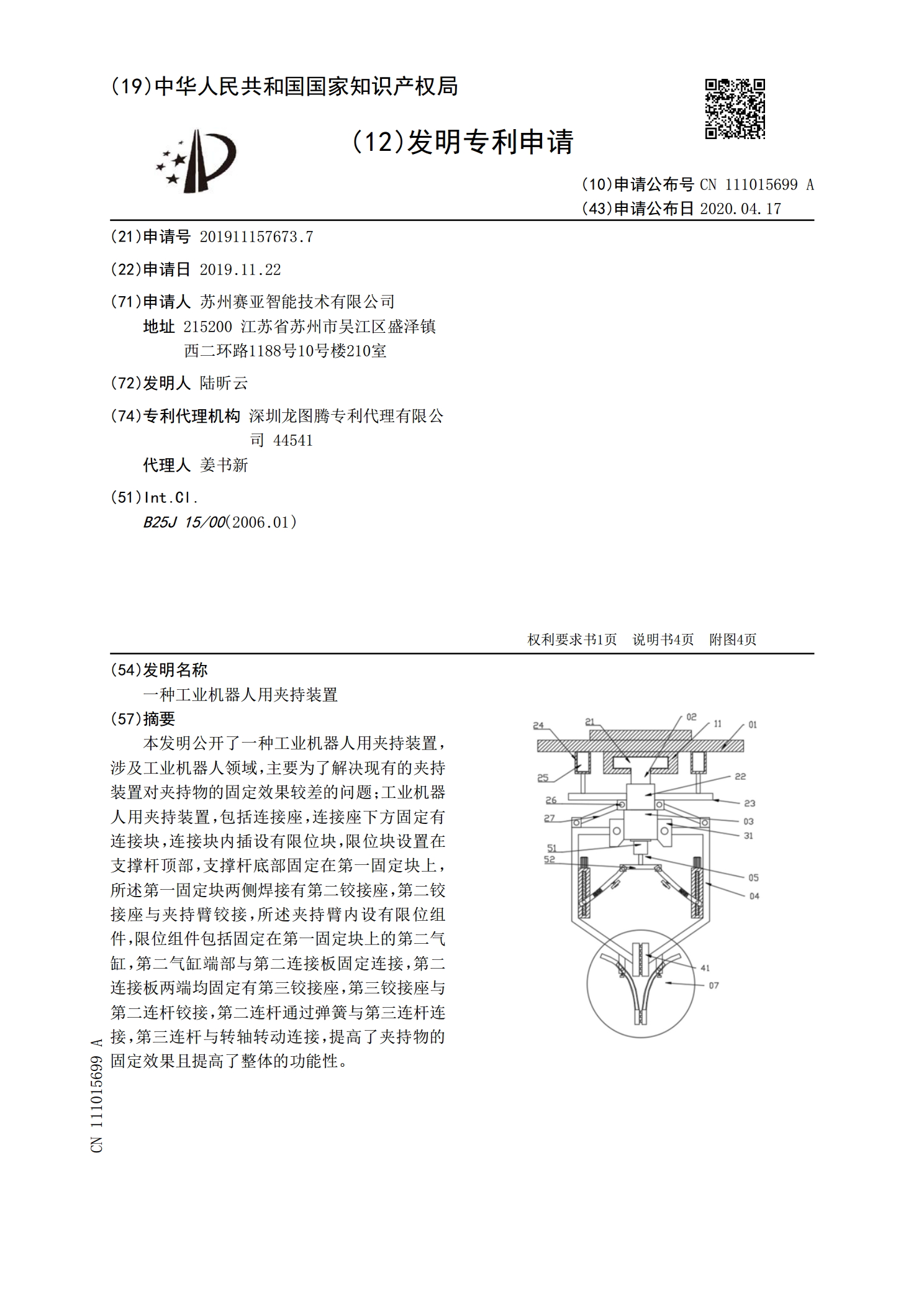
本发明公开了一种工业机器人用夹持装置,涉及工业机器人领域,主要为了解决现有的夹持装置对夹持物的固定效果较差的问题;工业机器人用夹持装置,包括连接座,连接座下方固定有连接块,连接块内插设有限位块,限位块设置在支撑杆顶部,支撑杆底部固定在第一固定块上,所述第一固定块两侧焊接有第二铰接座,第二铰接座与夹持臂铰接,所述夹持臂内设有限位组件,限位组件包括固定在第一固定块上的第二气缸,第二气缸端部与第二连接板固定连接,第二连接板两端均固定有第三铰接座,第三铰接座与第二连杆铰接,第二连杆通过弹簧与第三连杆连接,第三连杆