
一种工业机器人用夹持装置.pdf

论文****轩吖


1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工业机器人用夹持装置.pdf
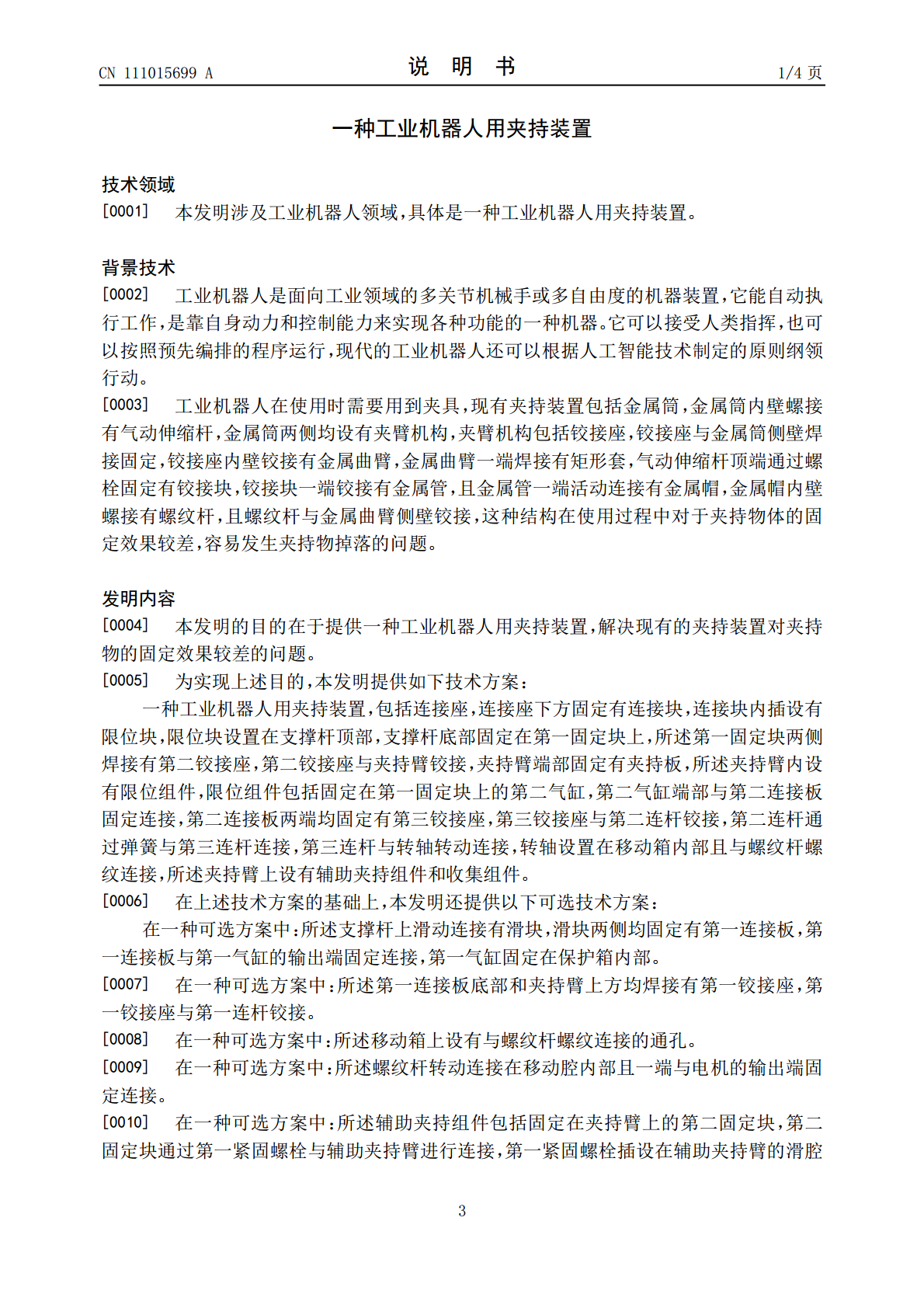
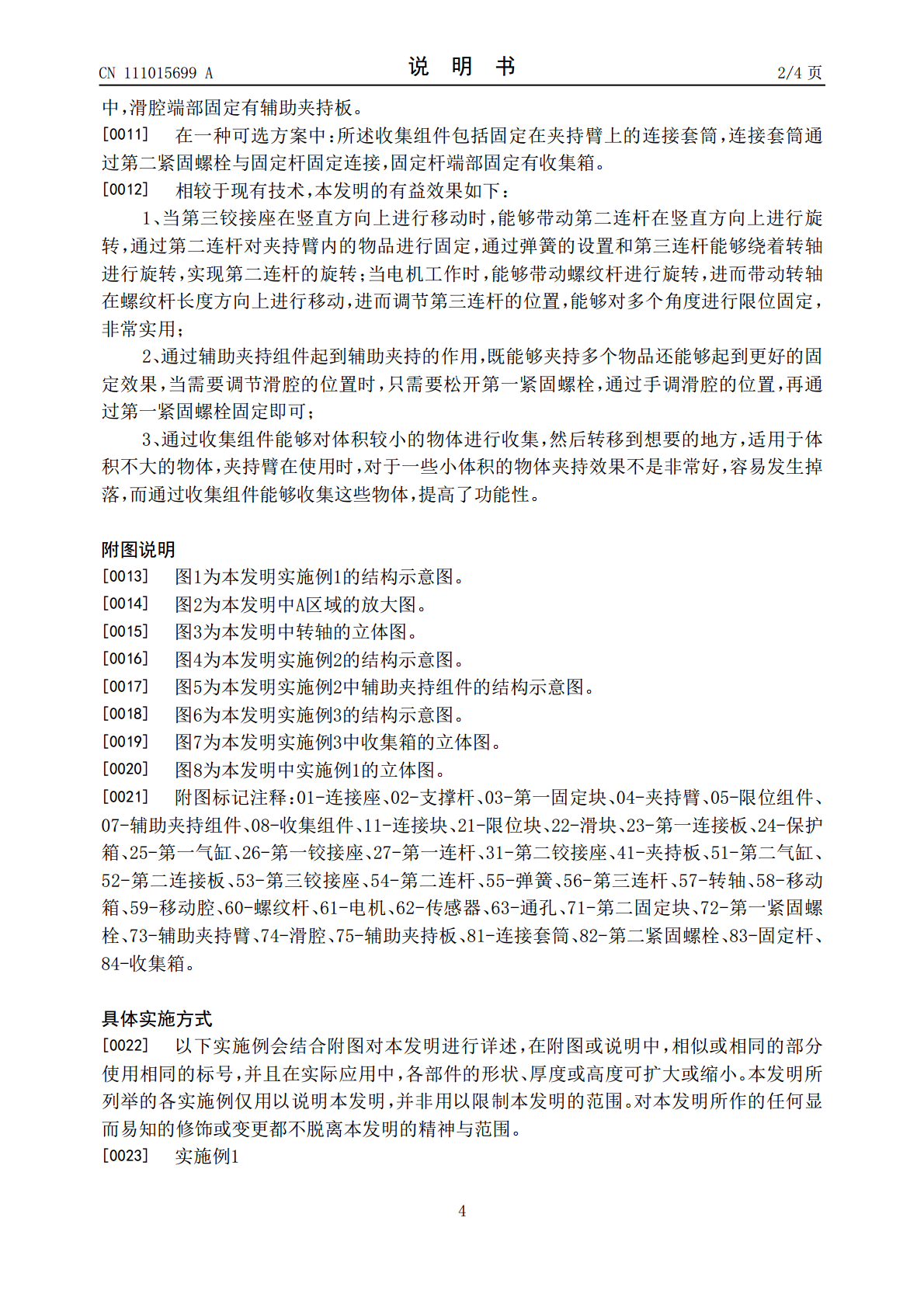
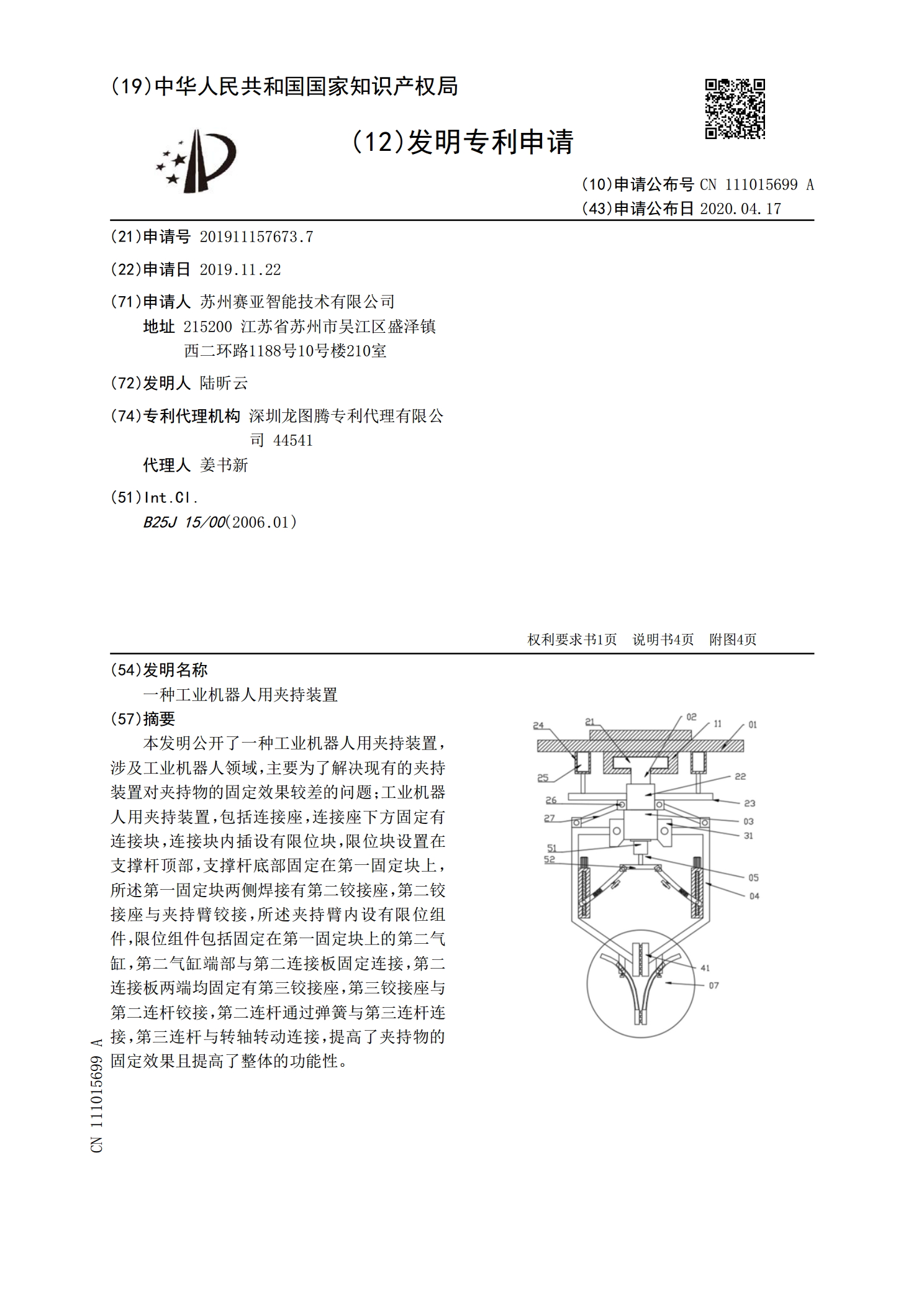
本发明公开了一种工业机器人用夹持装置,涉及工业机器人领域,主要为了解决现有的夹持装置对夹持物的固定效果较差的问题;工业机器人用夹持装置,包括连接座,连接座下方固定有连接块,连接块内插设有限位块,限位块设置在支撑杆顶部,支撑杆底部固定在第一固定块上,所述第一固定块两侧焊接有第二铰接座,第二铰接座与夹持臂铰接,所述夹持臂内设有限位组件,限位组件包括固定在第一固定块上的第二气缸,第二气缸端部与第二连接板固定连接,第二连接板两端均固定有第三铰接座,第三铰接座与第二连杆铰接,第二连杆通过弹簧与第三连杆连接,第三连杆
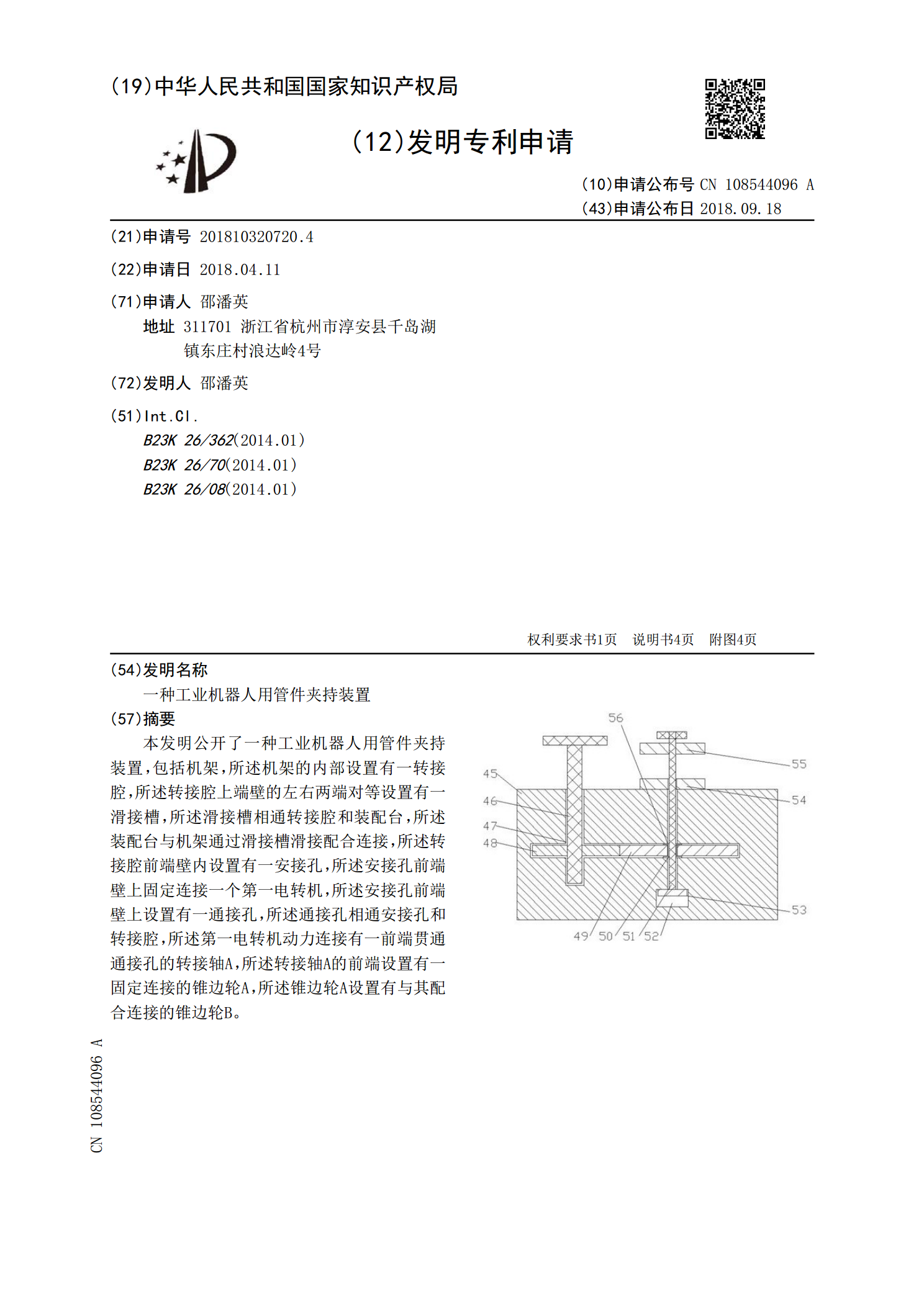
一种工业机器人用管件夹持装置.pdf
本发明公开了一种工业机器人用管件夹持装置,包括机架,所述机架的内部设置有一转接腔,所述转接腔上端壁的左右两端对等设置有一滑接槽,所述滑接槽相通转接腔和装配台,所述装配台与机架通过滑接槽滑接配合连接,所述转接腔前端壁内设置有一安接孔,所述安接孔前端壁上固定连接一个第一电转机,所述安接孔前端壁上设置有一通接孔,所述通接孔相通安接孔和转接腔,所述第一电转机动力连接有一前端贯通通接孔的转接轴A,所述转接轴A的前端设置有一固定连接的锥边轮A,所述锥边轮A设置有与其配合连接的锥边轮B。
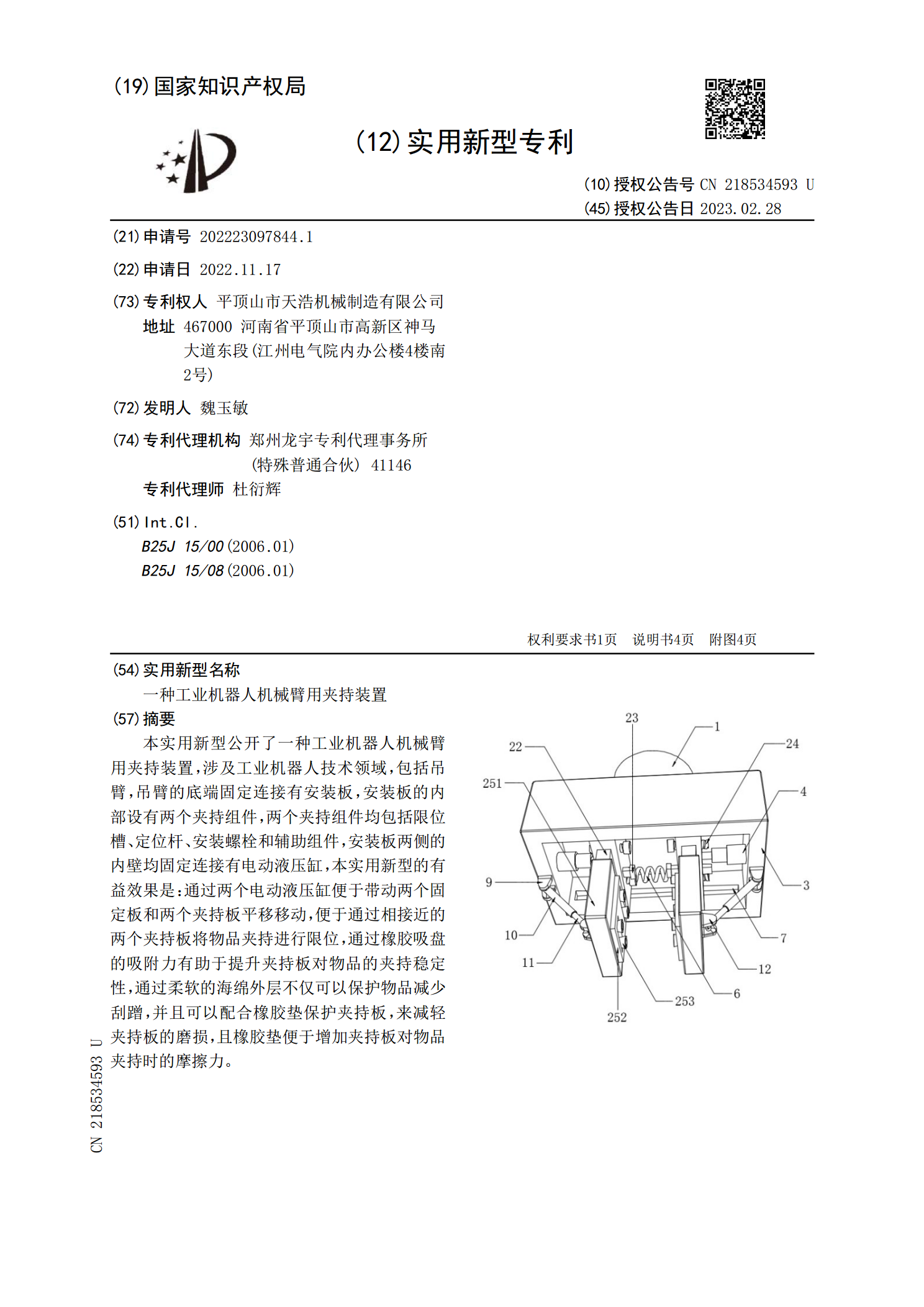
一种工业机器人机械臂用夹持装置.pdf
本实用新型公开了一种工业机器人机械臂用夹持装置,涉及工业机器人技术领域,包括吊臂,吊臂的底端固定连接有安装板,安装板的内部设有两个夹持组件,两个夹持组件均包括限位槽、定位杆、安装螺栓和辅助组件,安装板两侧的内壁均固定连接有电动液压缸,本实用新型的有益效果是:通过两个电动液压缸便于带动两个固定板和两个夹持板平移移动,便于通过相接近的两个夹持板将物品夹持进行限位,通过橡胶吸盘的吸附力有助于提升夹持板对物品的夹持稳定性,通过柔软的海绵外层不仅可以保护物品减少刮蹭,并且可以配合橡胶垫保护夹持板,来减轻夹持板的磨损
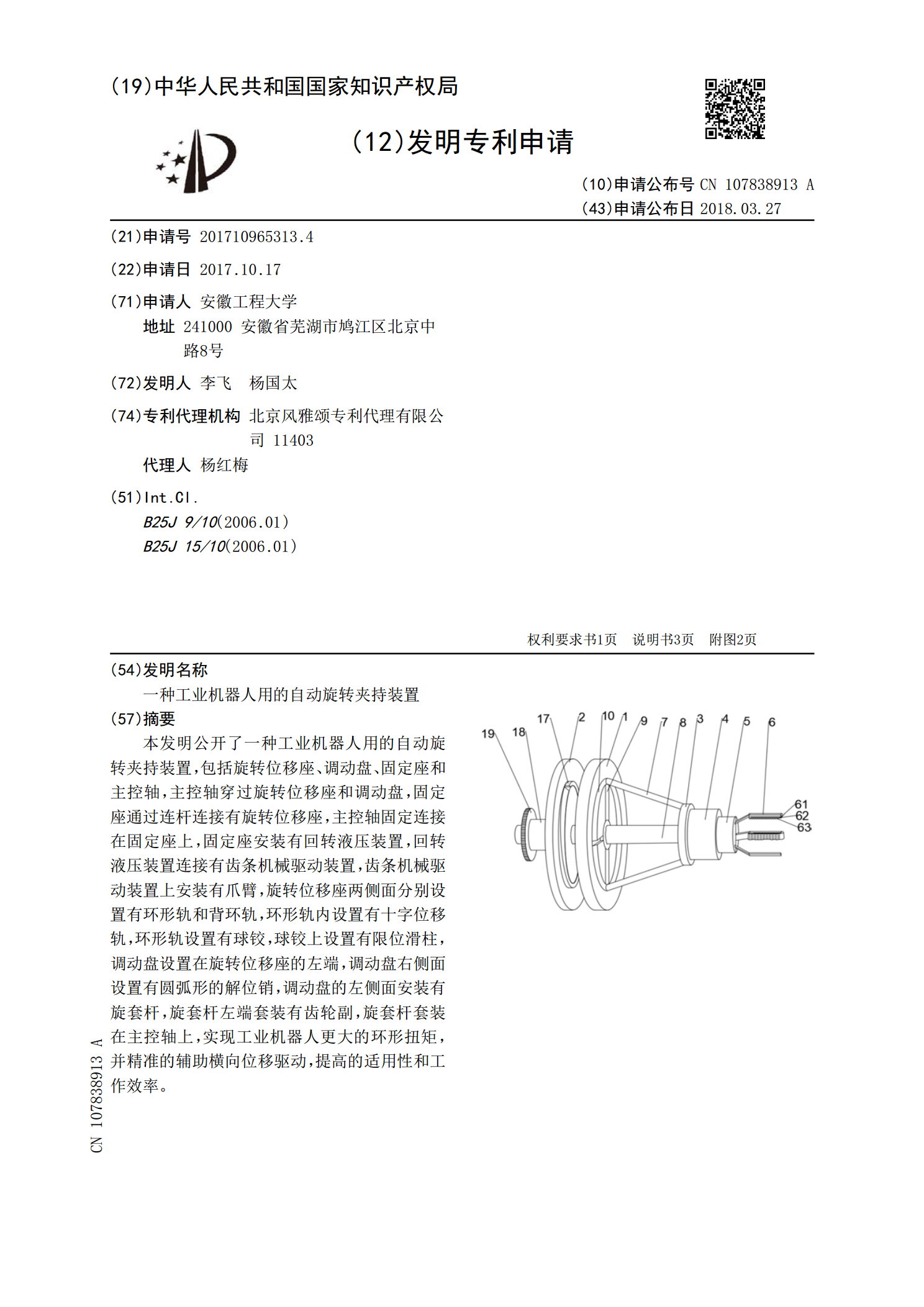
一种工业机器人用的自动旋转夹持装置.pdf
本发明公开了一种工业机器人用的自动旋转夹持装置,包括旋转位移座、调动盘、固定座和主控轴,主控轴穿过旋转位移座和调动盘,固定座通过连杆连接有旋转位移座,主控轴固定连接在固定座上,固定座安装有回转液压装置,回转液压装置连接有齿条机械驱动装置,齿条机械驱动装置上安装有爪臂,旋转位移座两侧面分别设置有环形轨和背环轨,环形轨内设置有十字位移轨,环形轨设置有球铰,球铰上设置有限位滑柱,调动盘设置在旋转位移座的左端,调动盘右侧面设置有圆弧形的解位销,调动盘的左侧面安装有旋套杆,旋套杆左端套装有齿轮副,旋套杆套装在主控轴
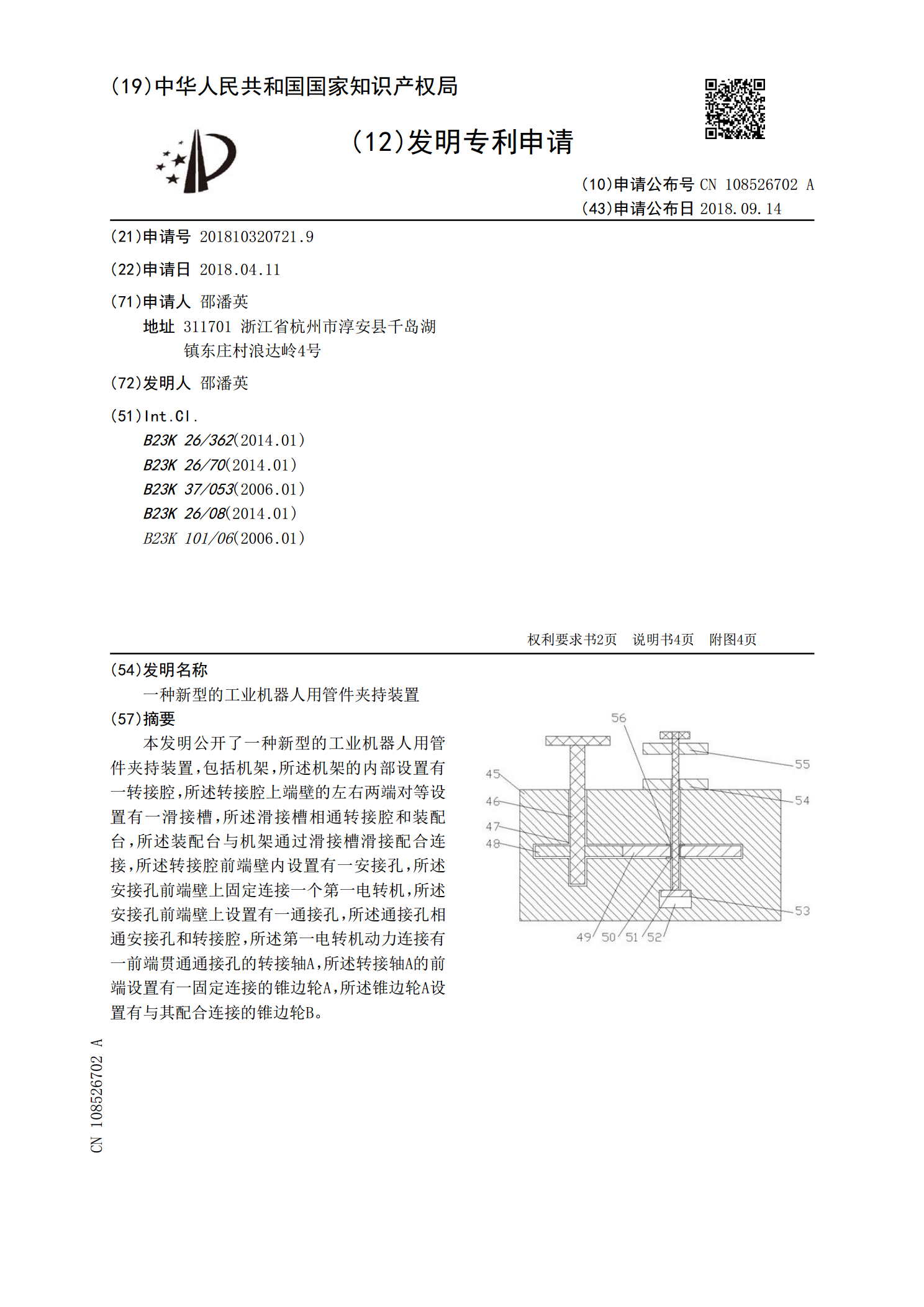
一种新型的工业机器人用管件夹持装置.pdf
本发明公开了一种新型的工业机器人用管件夹持装置,包括机架,所述机架的内部设置有一转接腔,所述转接腔上端壁的左右两端对等设置有一滑接槽,所述滑接槽相通转接腔和装配台,所述装配台与机架通过滑接槽滑接配合连接,所述转接腔前端壁内设置有一安接孔,所述安接孔前端壁上固定连接一个第一电转机,所述安接孔前端壁上设置有一通接孔,所述通接孔相通安接孔和转接腔,所述第一电转机动力连接有一前端贯通通接孔的转接轴A,所述转接轴A的前端设置有一固定连接的锥边轮A,所述锥边轮A设置有与其配合连接的锥边轮B。