
机器人手臂.pdf

Ja****23

1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人手臂.pdf
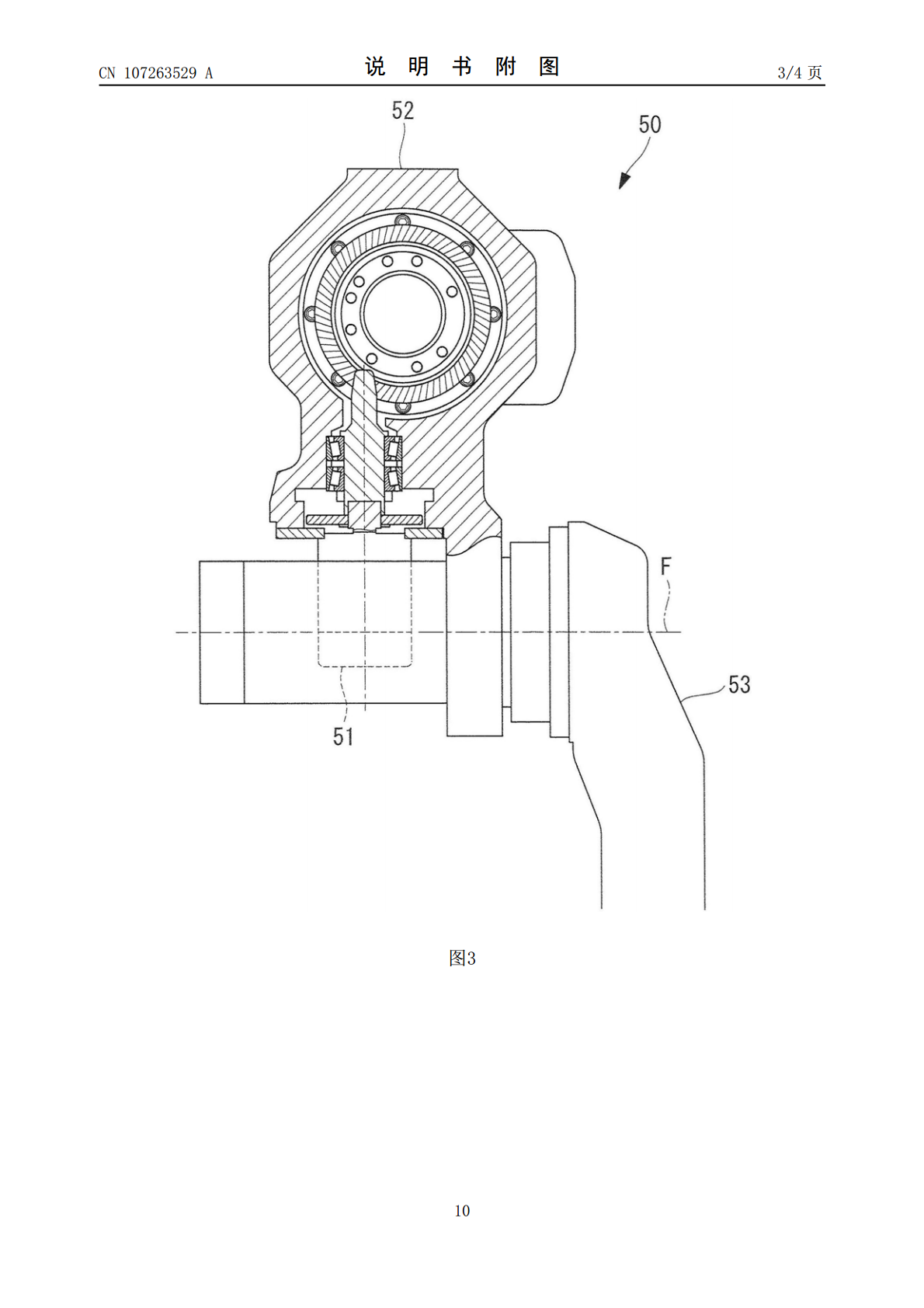
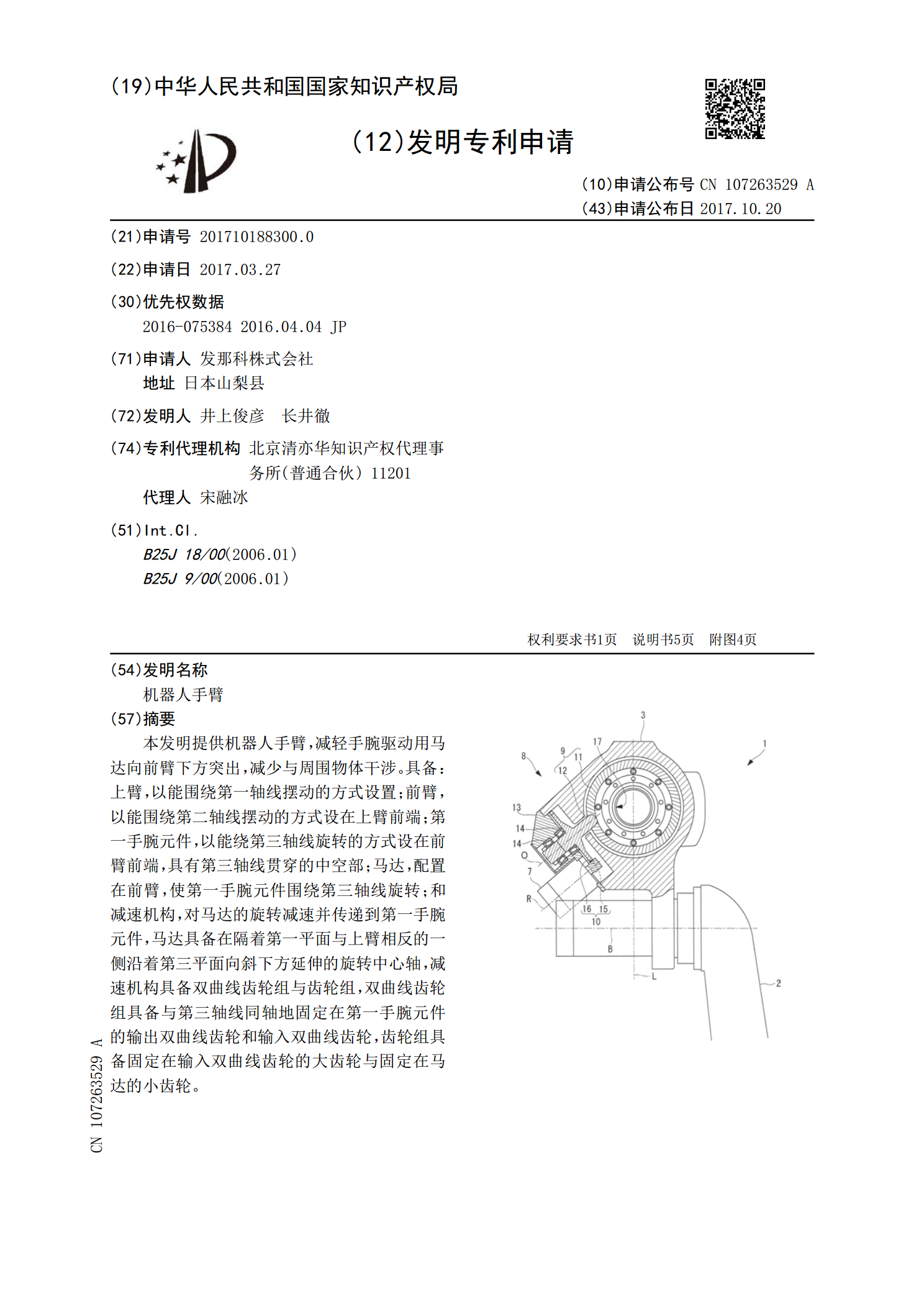
本发明提供机器人手臂,减轻手腕驱动用马达向前臂下方突出,减少与周围物体干涉。具备:上臂,以能围绕第一轴线摆动的方式设置;前臂,以能围绕第二轴线摆动的方式设在上臂前端;第一手腕元件,以能绕第三轴线旋转的方式设在前臂前端,具有第三轴线贯穿的中空部;马达,配置在前臂,使第一手腕元件围绕第三轴线旋转;和减速机构,对马达的旋转减速并传递到第一手腕元件,马达具备在隔着第一平面与上臂相反的一侧沿着第三平面向斜下方延伸的旋转中心轴,减速机构具备双曲线齿轮组与齿轮组,双曲线齿轮组具备与第三轴线同轴地固定在第一手腕元件的输出
机器人手臂机构.pdf
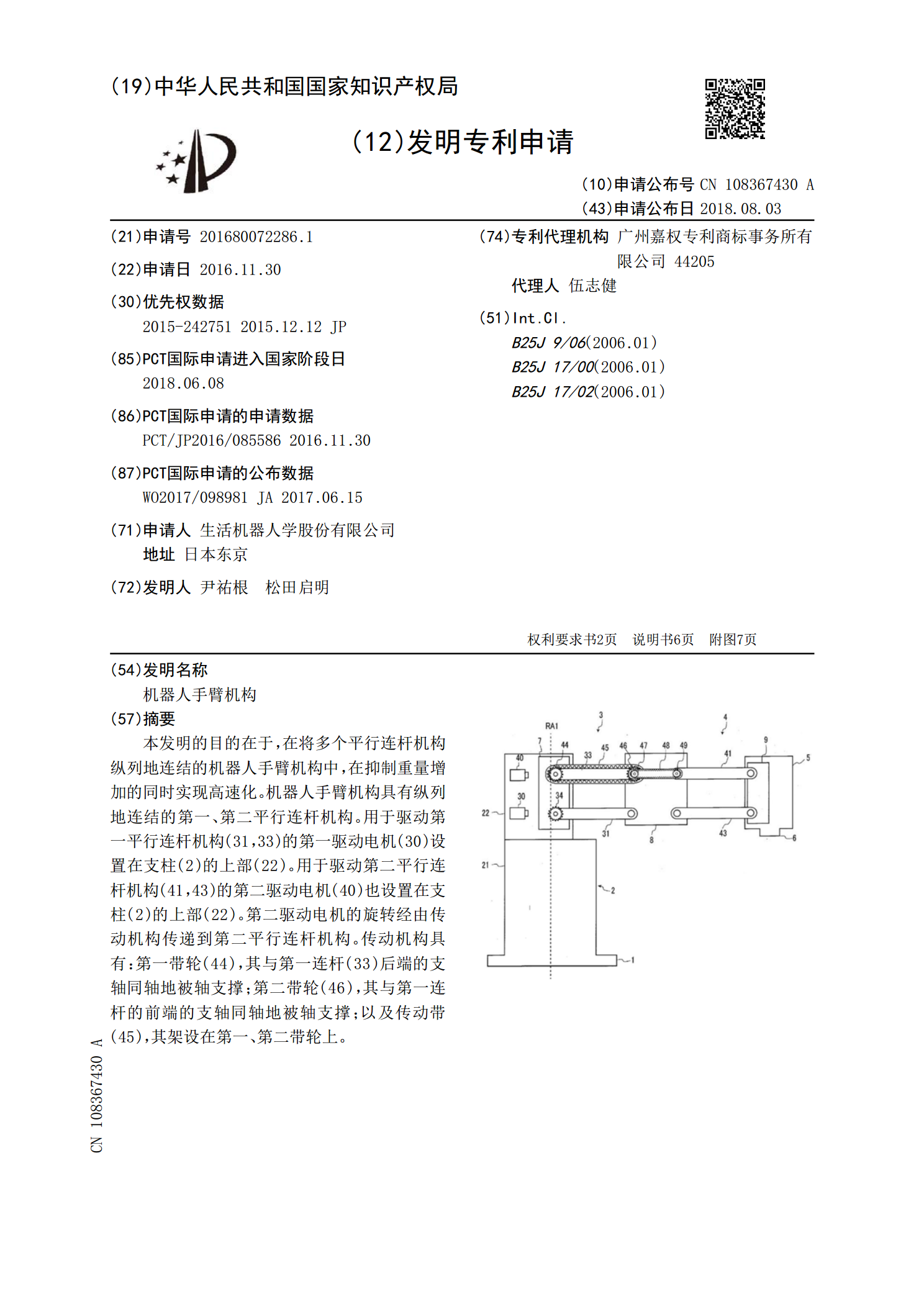
本发明的目的在于,在将多个平行连杆机构纵列地连结的机器人手臂机构中,在抑制重量增加的同时实现高速化。机器人手臂机构具有纵列地连结的第一、第二平行连杆机构。用于驱动第一平行连杆机构(31,33)的第一驱动电机(30)设置在支柱(2)的上部(22)。用于驱动第二平行连杆机构(41,43)的第二驱动电机(40)也设置在支柱(2)的上部(22)。第二驱动电机的旋转经由传动机构传递到第二平行连杆机构。传动机构具有:第一带轮(44),其与第一连杆(33)后端的支轴同轴地被轴支撑;第二带轮(46),其与第一连杆的前端的
机器人手臂机构及机器人.pdf
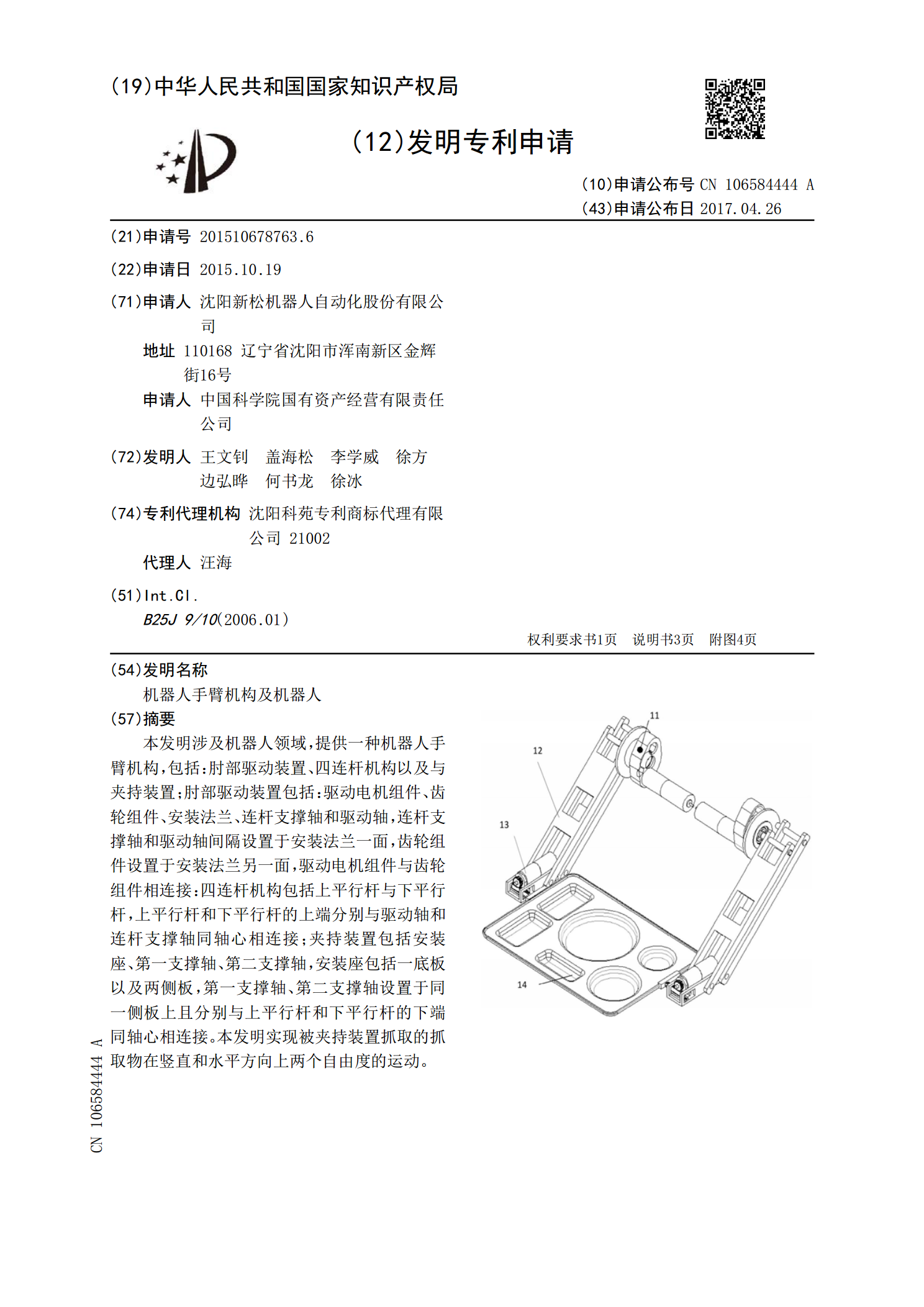
本发明涉及机器人领域,提供一种机器人手臂机构,包括:肘部驱动装置、四连杆机构以及与夹持装置;肘部驱动装置包括:驱动电机组件、齿轮组件、安装法兰、连杆支撑轴和驱动轴,连杆支撑轴和驱动轴间隔设置于安装法兰一面,齿轮组件设置于安装法兰另一面,驱动电机组件与齿轮组件相连接:四连杆机构包括上平行杆与下平行杆,上平行杆和下平行杆的上端分别与驱动轴和连杆支撑轴同轴心相连接;夹持装置包括安装座、第一支撑轴、第二支撑轴,安装座包括一底板以及两侧板,第一支撑轴、第二支撑轴设置于同一侧板上且分别与上平行杆和下平行杆的下端同轴心
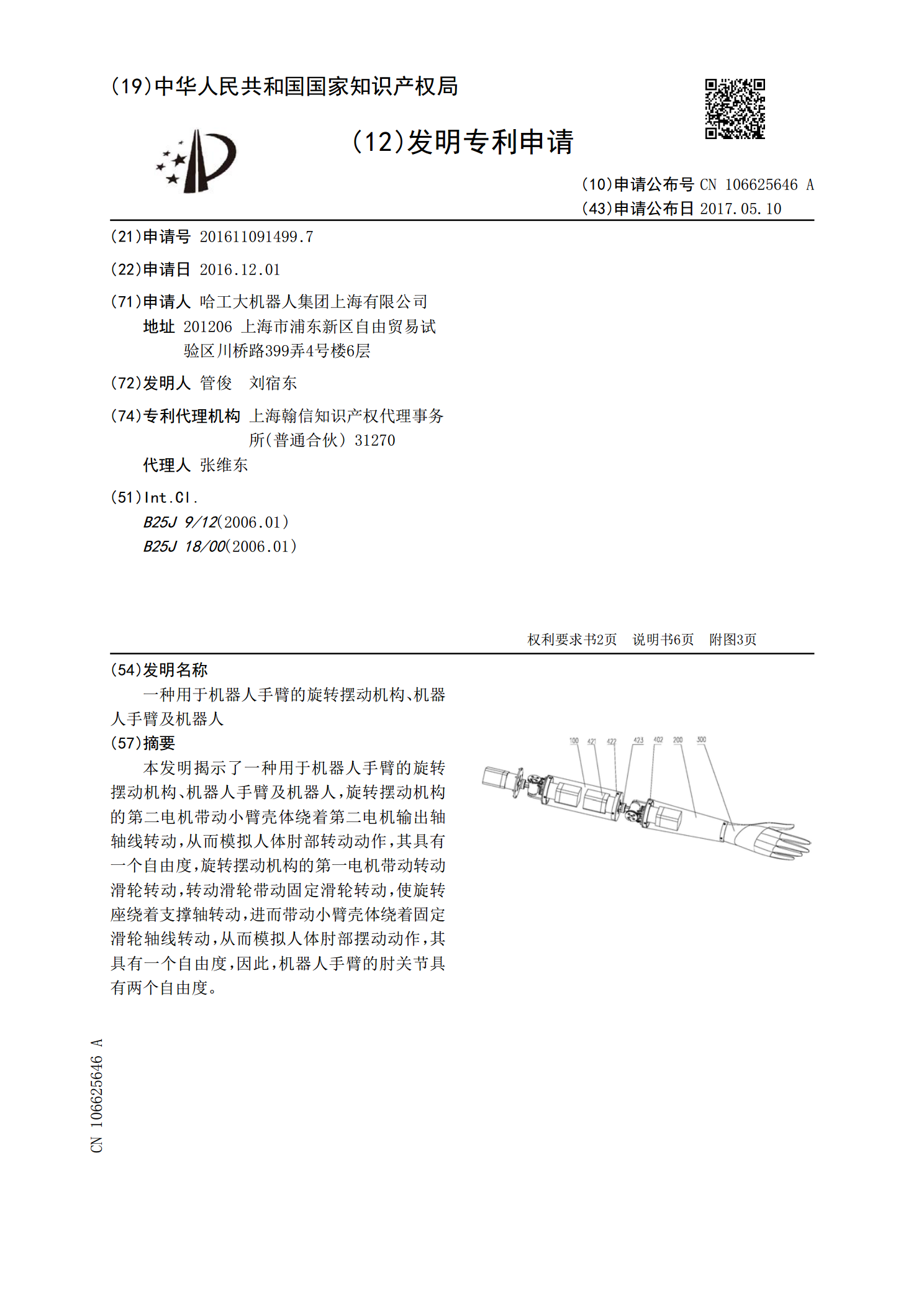
一种用于机器人手臂的旋转摆动机构、机器人手臂及机器人.pdf
本发明揭示了一种用于机器人手臂的旋转摆动机构、机器人手臂及机器人,旋转摆动机构的第二电机带动小臂壳体绕着第二电机输出轴轴线转动,从而模拟人体肘部转动动作,其具有一个自由度,旋转摆动机构的第一电机带动转动滑轮转动,转动滑轮带动固定滑轮转动,使旋转座绕着支撑轴转动,进而带动小臂壳体绕着固定滑轮轴线转动,从而模拟人体肘部摆动动作,其具有一个自由度,因此,机器人手臂的肘关节具有两个自由度。
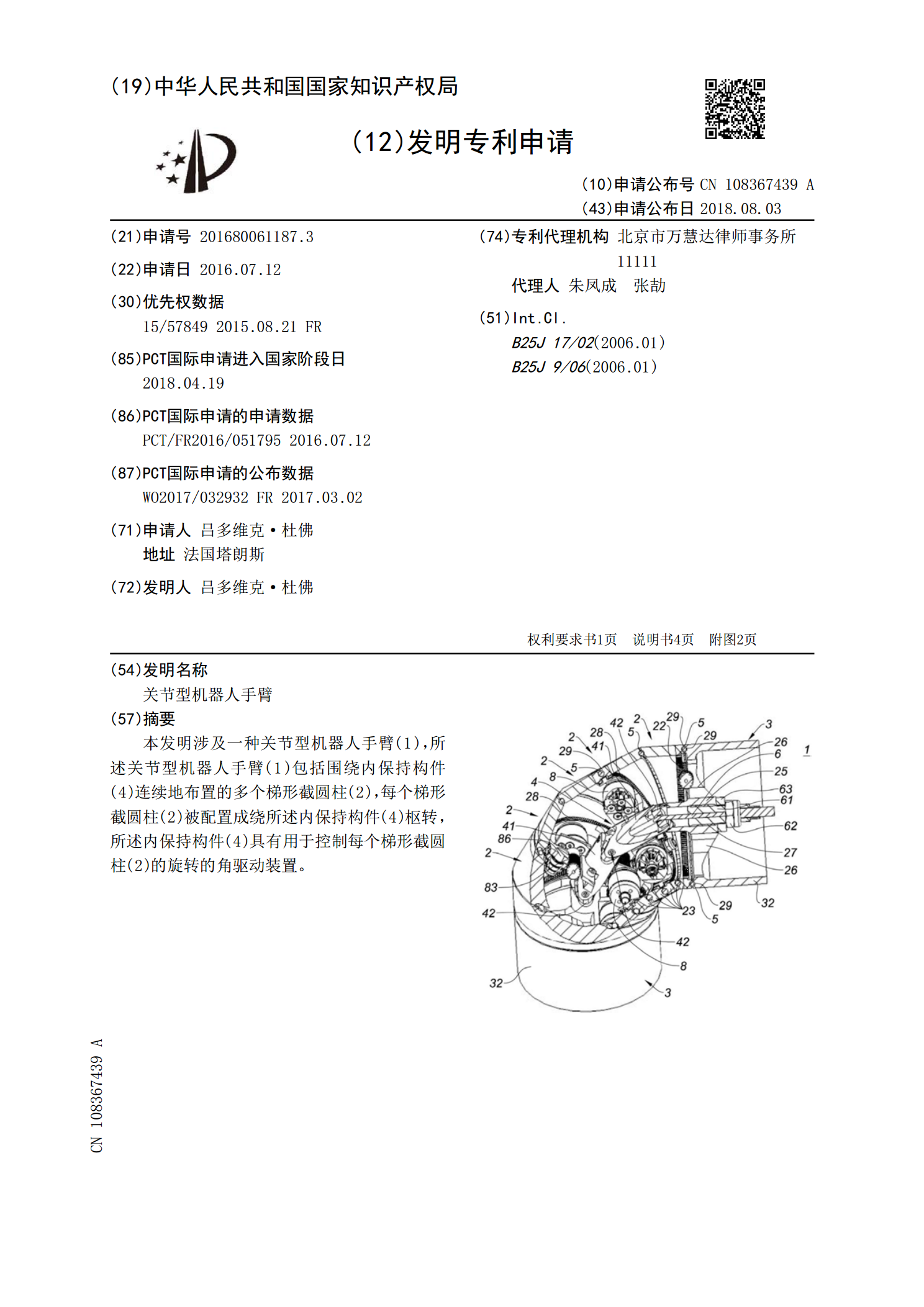
关节型机器人手臂.pdf
本发明涉及一种关节型机器人手臂(1),所述关节型机器人手臂(1)包括围绕内保持构件(4)连续地布置的多个梯形截圆柱(2),每个梯形截圆柱(2)被配置成绕所述内保持构件(4)枢转,所述内保持构件(4)具有用于控制每个梯形截圆柱(2)的旋转的角驱动装置。