
关节型机器人手臂.pdf

鸿朗****ka


1/8
2/8
3/8

4/8

5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
关节型机器人手臂.pdf
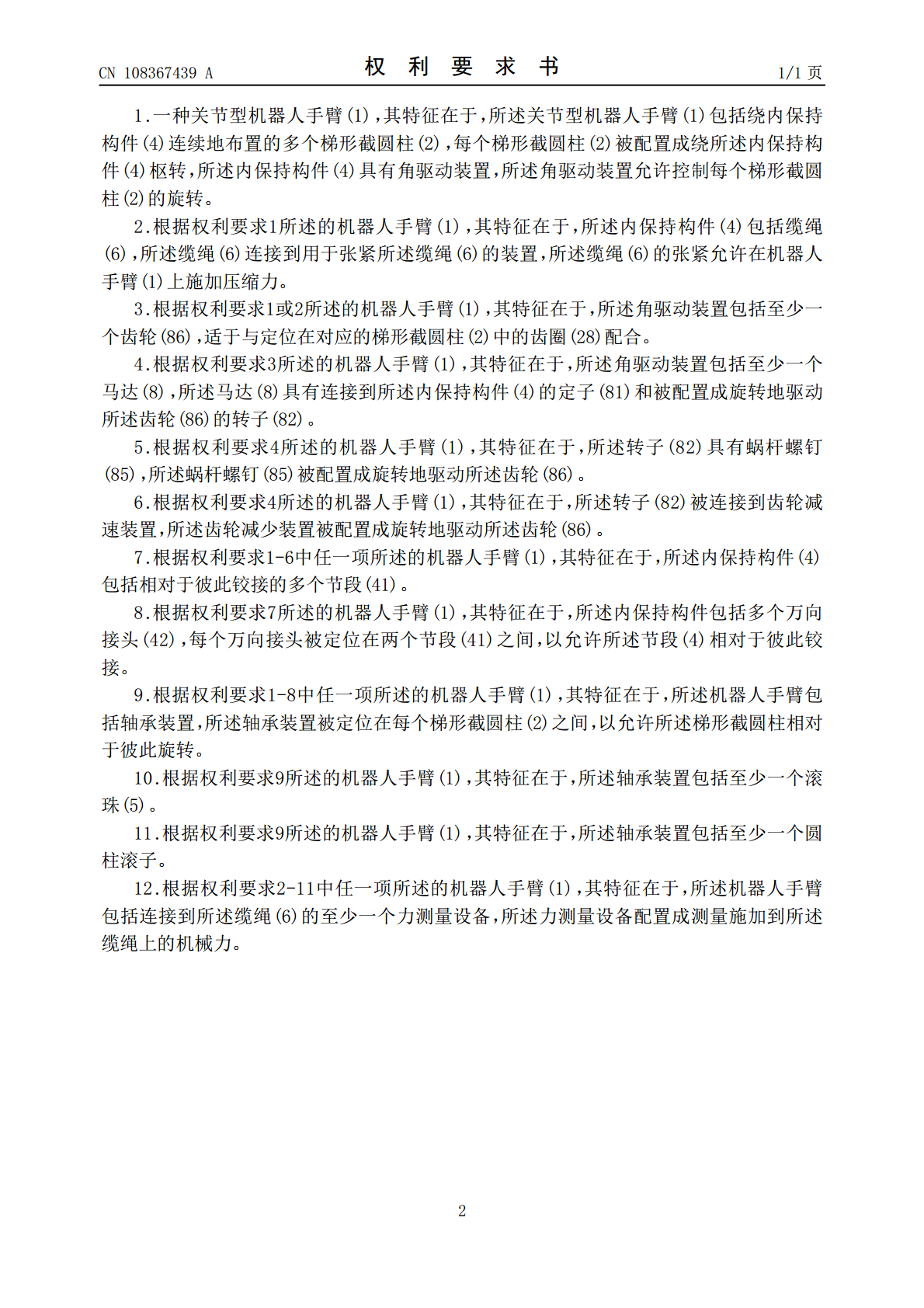
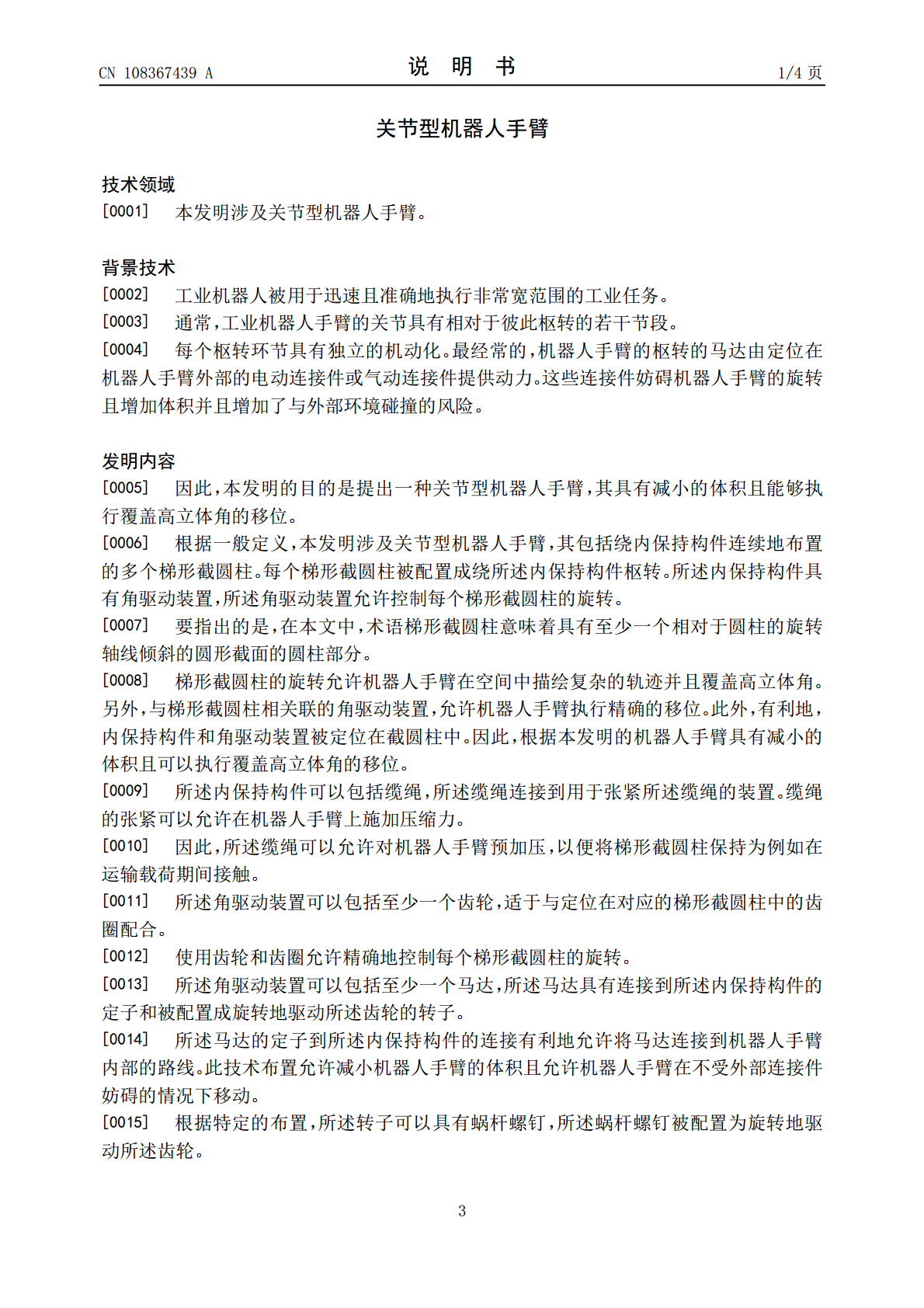
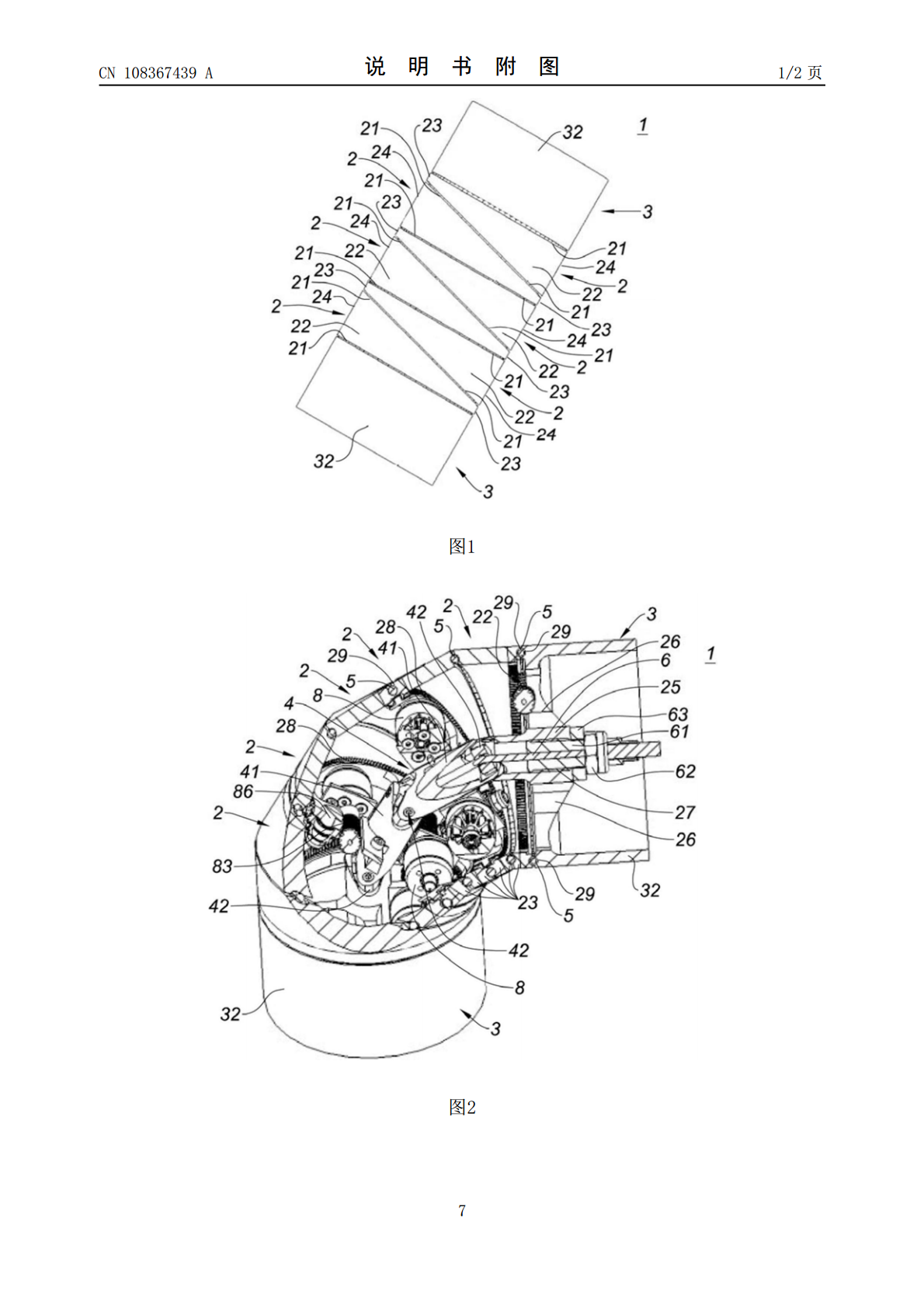
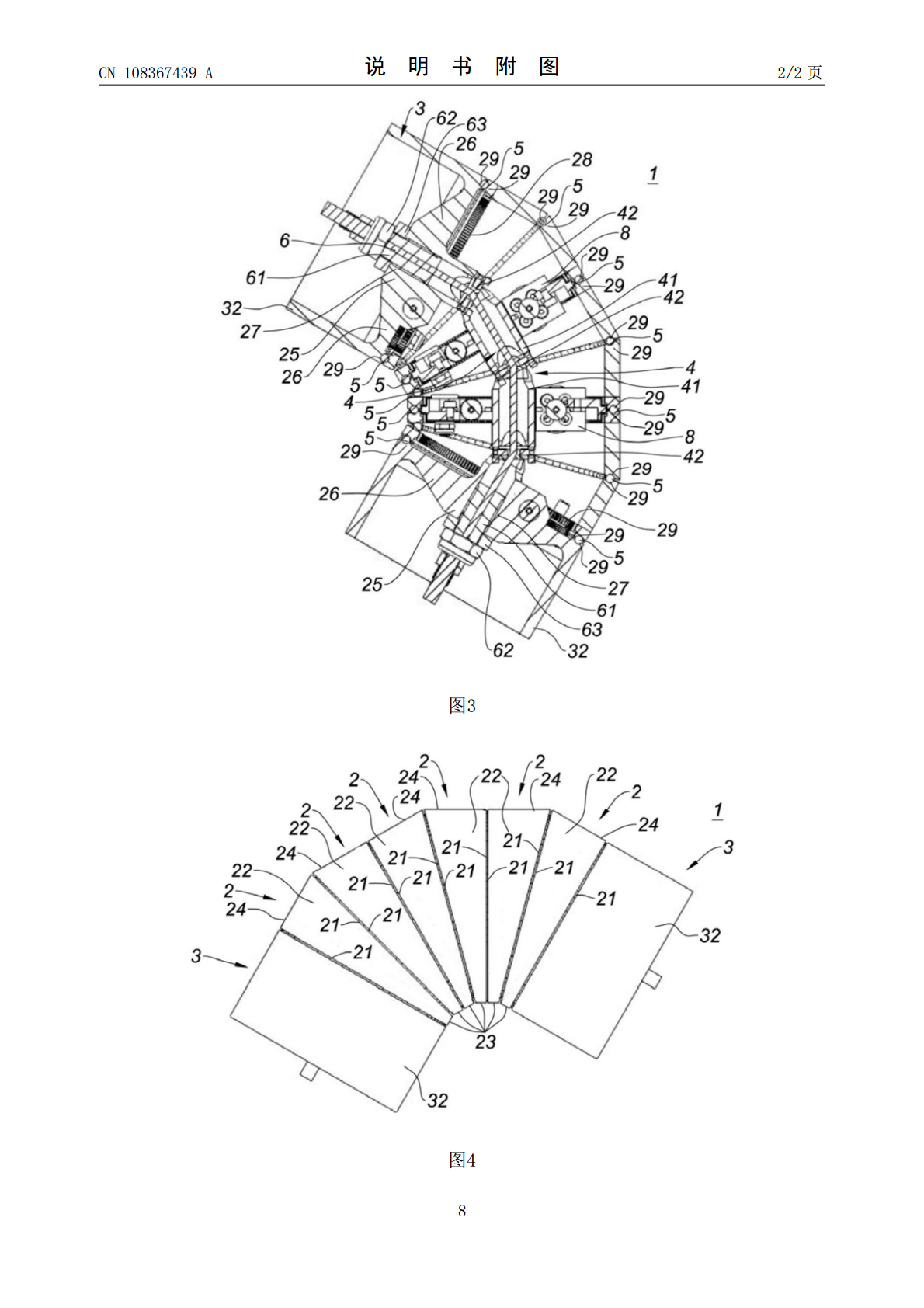
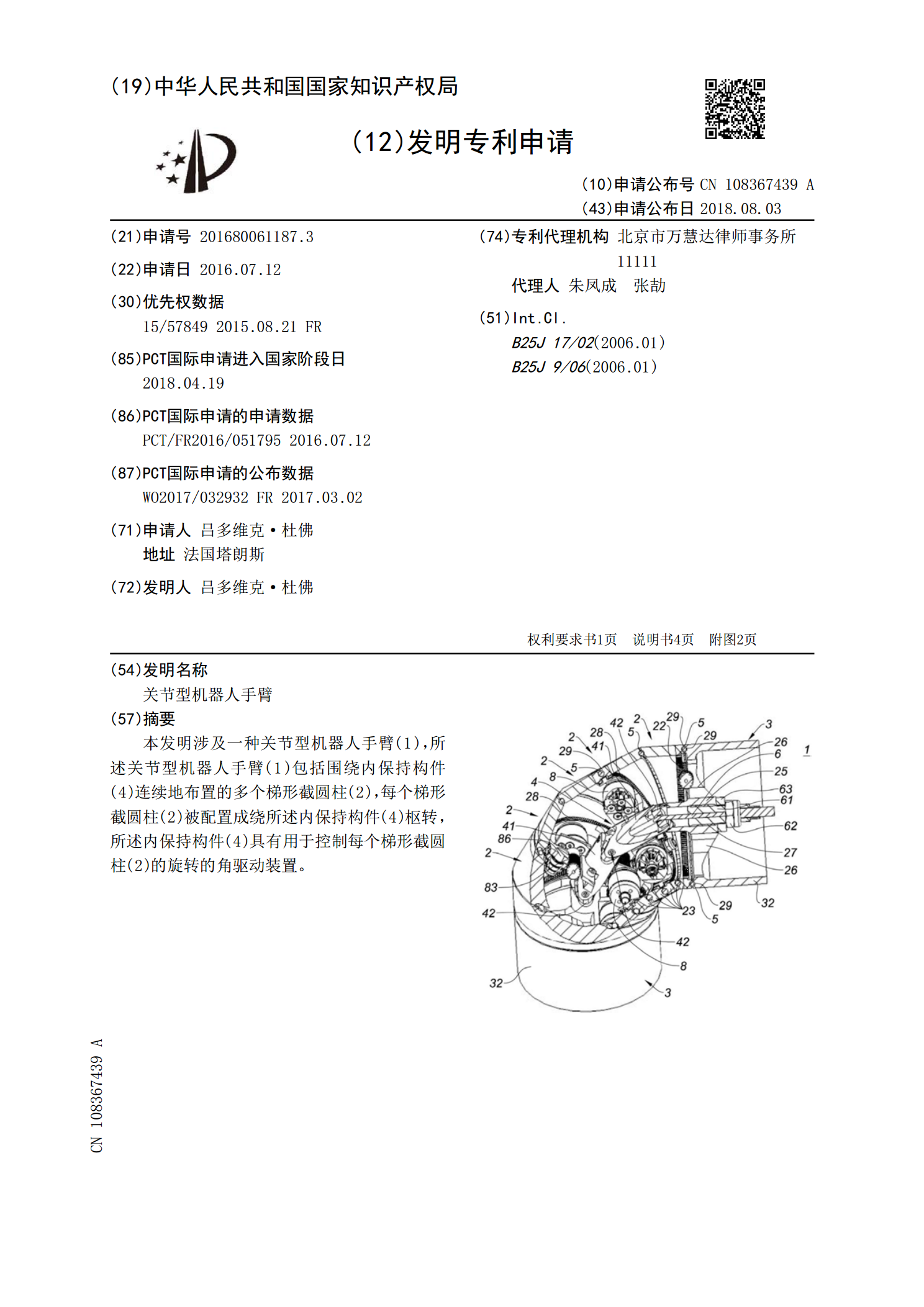
本发明涉及一种关节型机器人手臂(1),所述关节型机器人手臂(1)包括围绕内保持构件(4)连续地布置的多个梯形截圆柱(2),每个梯形截圆柱(2)被配置成绕所述内保持构件(4)枢转,所述内保持构件(4)具有用于控制每个梯形截圆柱(2)的旋转的角驱动装置。
机器人手臂关节电机.pdf
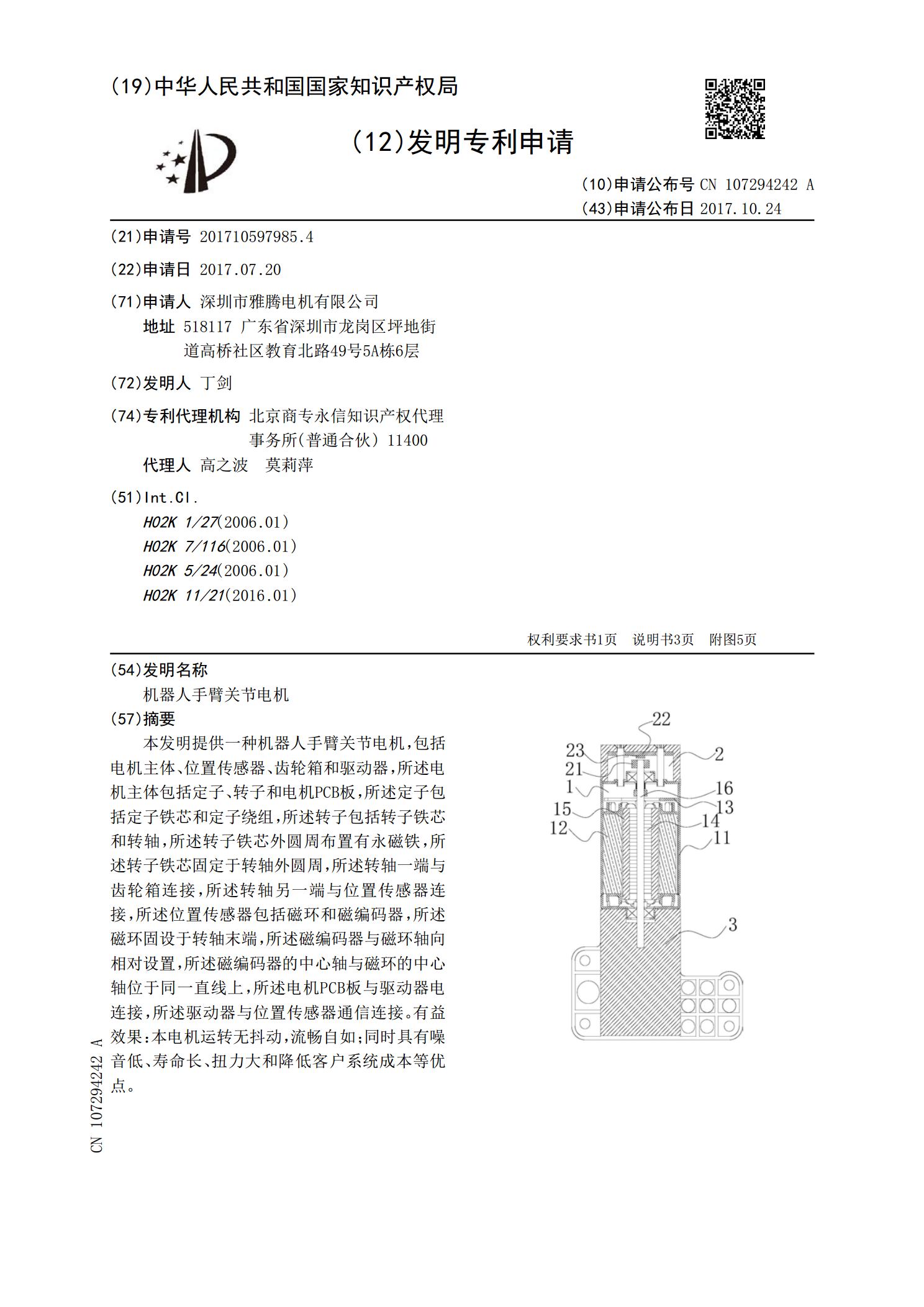
本发明提供一种机器人手臂关节电机,包括电机主体、位置传感器、齿轮箱和驱动器,所述电机主体包括定子、转子和电机PCB板,所述定子包括定子铁芯和定子绕组,所述转子包括转子铁芯和转轴,所述转子铁芯外圆周布置有永磁铁,所述转子铁芯固定于转轴外圆周,所述转轴一端与齿轮箱连接,所述转轴另一端与位置传感器连接,所述位置传感器包括磁环和磁编码器,所述磁环固设于转轴末端,所述磁编码器与磁环轴向相对设置,所述磁编码器的中心轴与磁环的中心轴位于同一直线上,所述电机PCB板与驱动器电连接,所述驱动器与位置传感器通信连接。有益效果

一种六关节手臂机器人.pdf
本发明公开了一种六关节手臂机器人,包括主体和第一凹槽,所述主体的内部底端设有第一凹槽,所述第一凹槽的内部底端设有箱体,所述箱体的左右两侧顶端均安装有转轴,所述转轴通过第一轴承与主体相连,所述箱体的正面底端设有转轮,所述箱体的底端设有卡爪。该六关节手臂机器人,通过第一凹槽和箱体的配合,能够在不使用机器时使卡爪转动到凹槽的内部,避免卡爪受到意外碰撞损坏,无法将工具夹紧进行加工的操作,大大增加了机器的安全性能,同时也省去了工作人员经常进行维修更换卡爪的操作,大大降低了工作人员的工作强度,通过第一螺柱和第一齿轮的

服务机器人的手臂模块化关节.pdf
一种服务机器人的手臂模块化关节,涉及机器人技术领域。本发明为解决现有机器人产品存在的规格多、批量小、零件的通用性差、成本高,质量与可靠性都不稳定,难以达到商品化的问题。该服务机器人的模块化关节包括关节总成、驱动总成和电气总成,直流电机的输出轴、制动器轴和编码器轴的轴线平行式分布,且分别通过第一齿轮套、第二齿轮套和第三齿轮套与齿轮连接,顶盖、第二基座、第一基座、基座筒和底盖之间由上至下依次固定连接;齿轮通过锁紧螺母与第一基座相连,齿轮和第一基座之间设有第一薄壁轴承和第二薄壁轴承。本发明用于机器人的制造。
智能型保姆机器人手臂.pdf
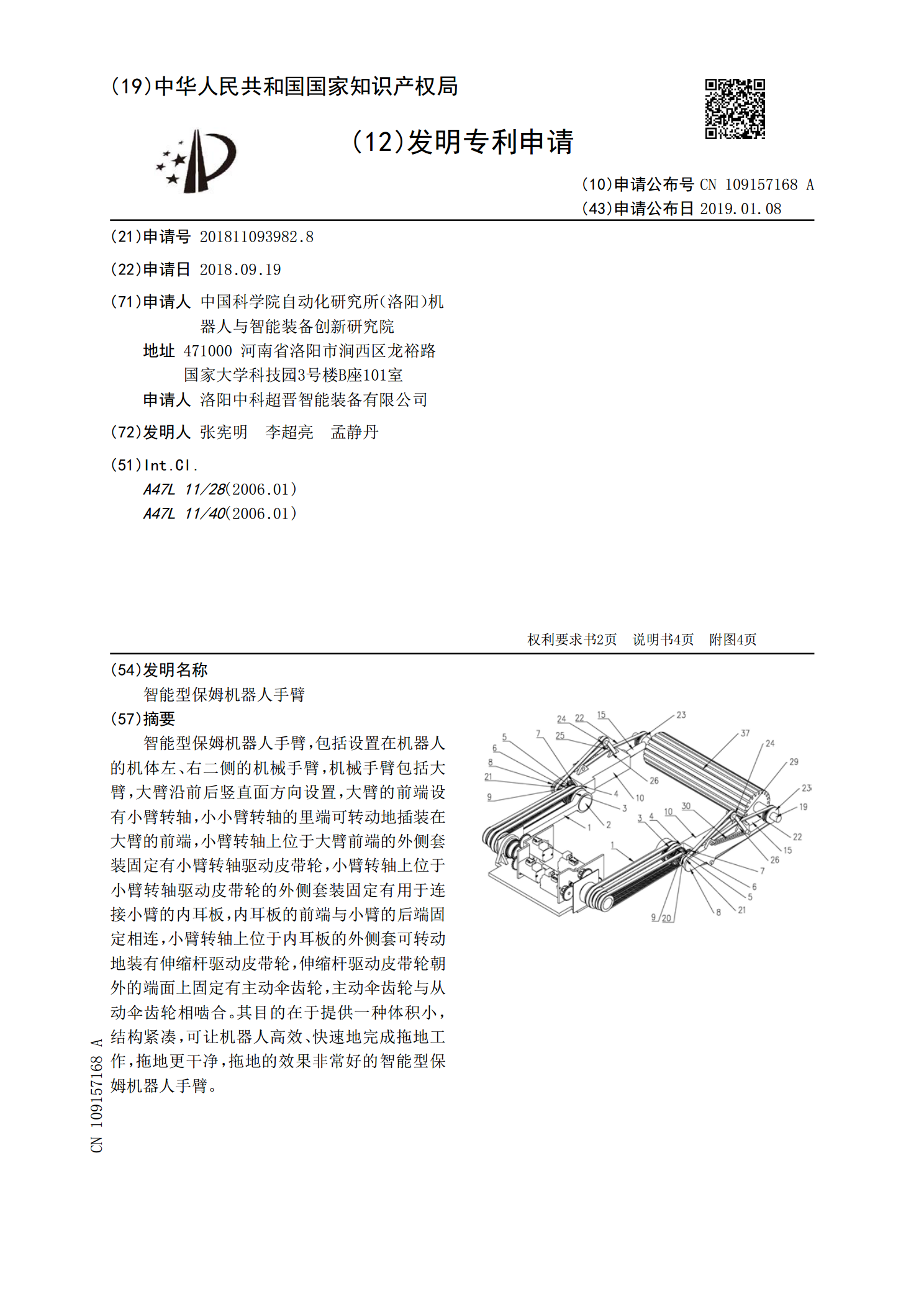
智能型保姆机器人手臂,包括设置在机器人的机体左、右二侧的机械手臂,机械手臂包括大臂,大臂沿前后竖直面方向设置,大臂的前端设有小臂转轴,小小臂转轴的里端可转动地插装在大臂的前端,小臂转轴上位于大臂前端的外侧套装固定有小臂转轴驱动皮带轮,小臂转轴上位于小臂转轴驱动皮带轮的外侧套装固定有用于连接小臂的内耳板,内耳板的前端与小臂的后端固定相连,小臂转轴上位于内耳板的外侧套可转动地装有伸缩杆驱动皮带轮,伸缩杆驱动皮带轮朝外的端面上固定有主动伞齿轮,主动伞齿轮与从动伞齿轮相啮合。其目的在于提供一种体积小,结构紧凑,可