
一种用于机器人手臂的旋转摆动机构、机器人手臂及机器人.pdf

新槐****公主

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于机器人手臂的旋转摆动机构、机器人手臂及机器人.pdf
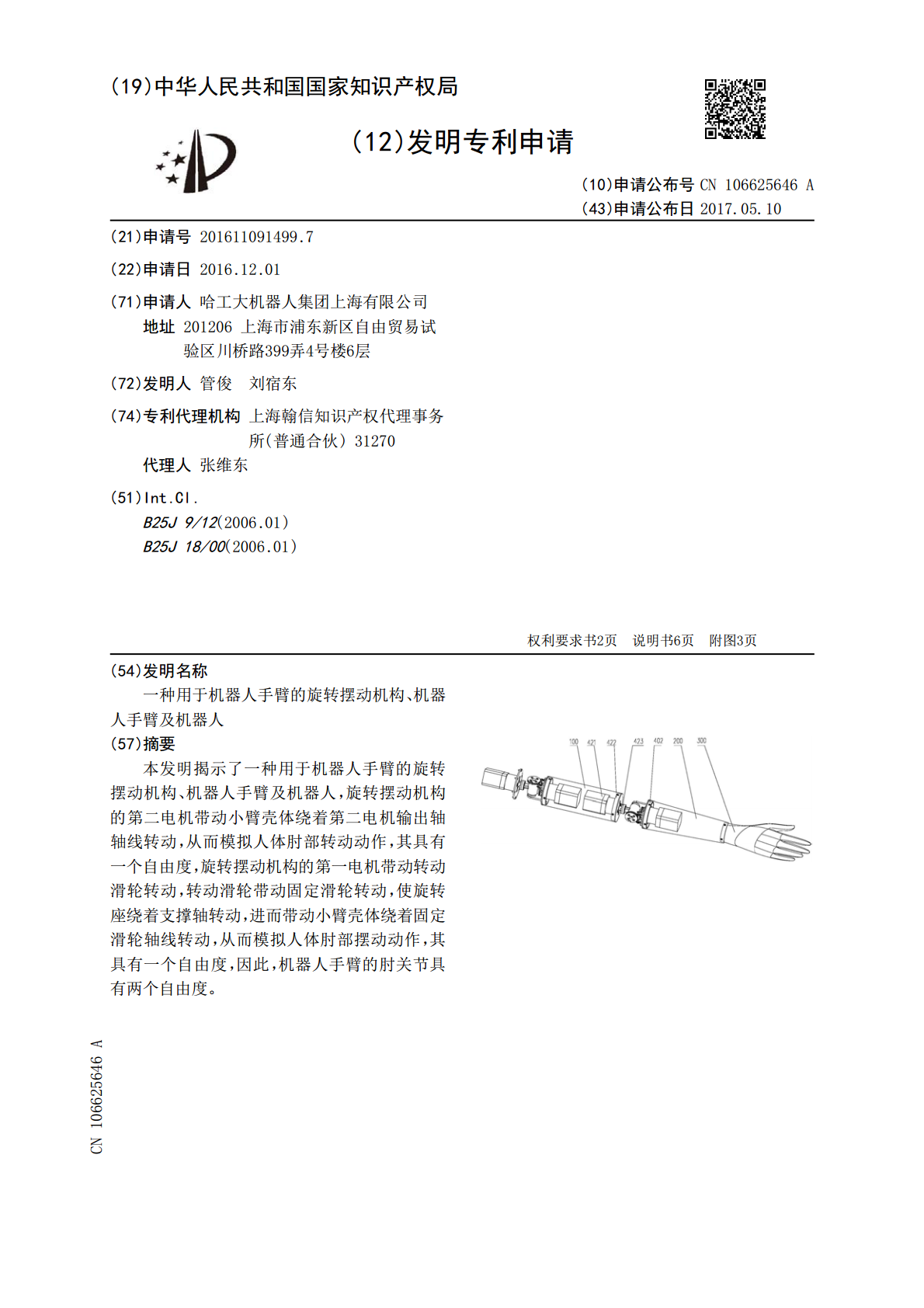
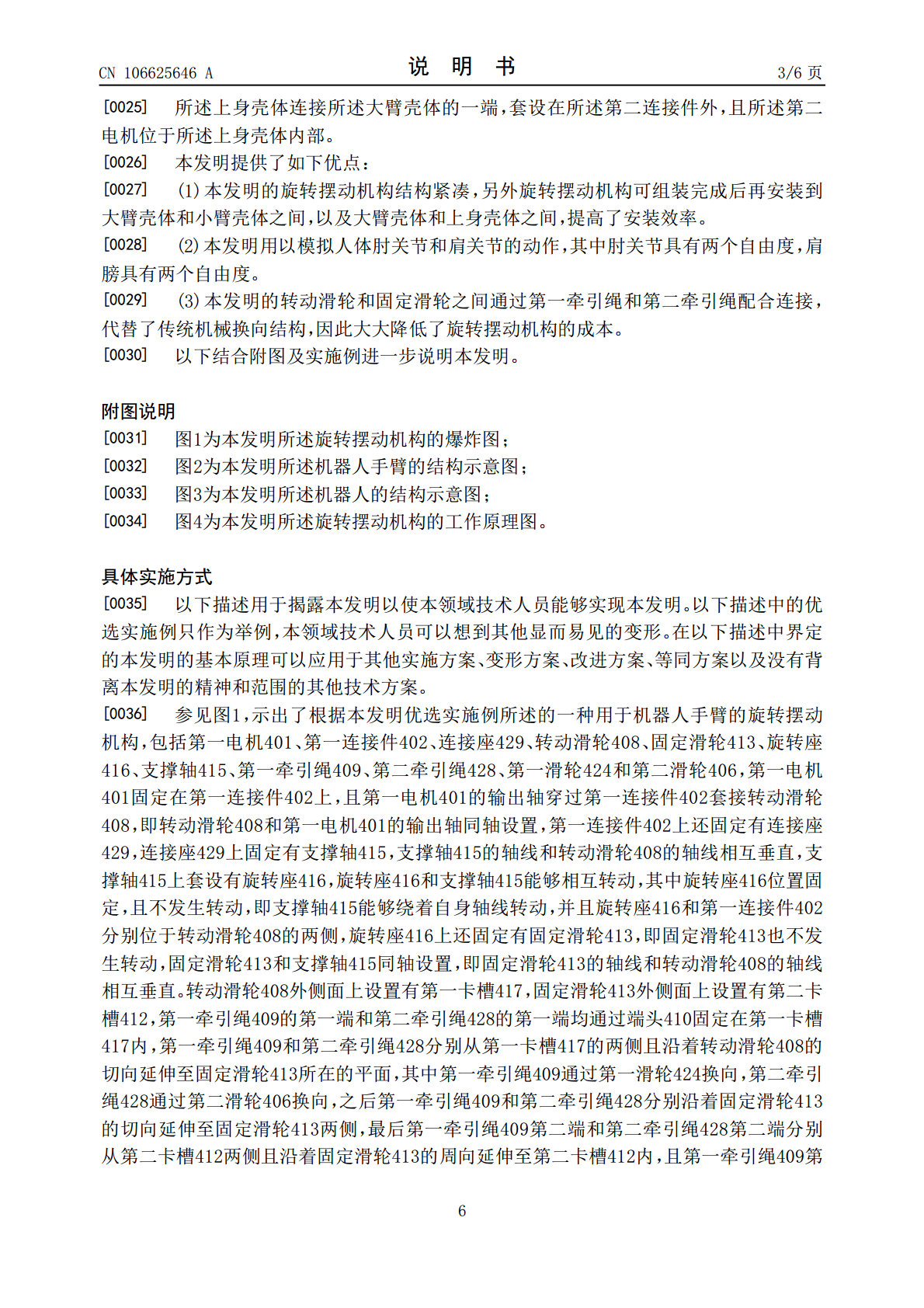
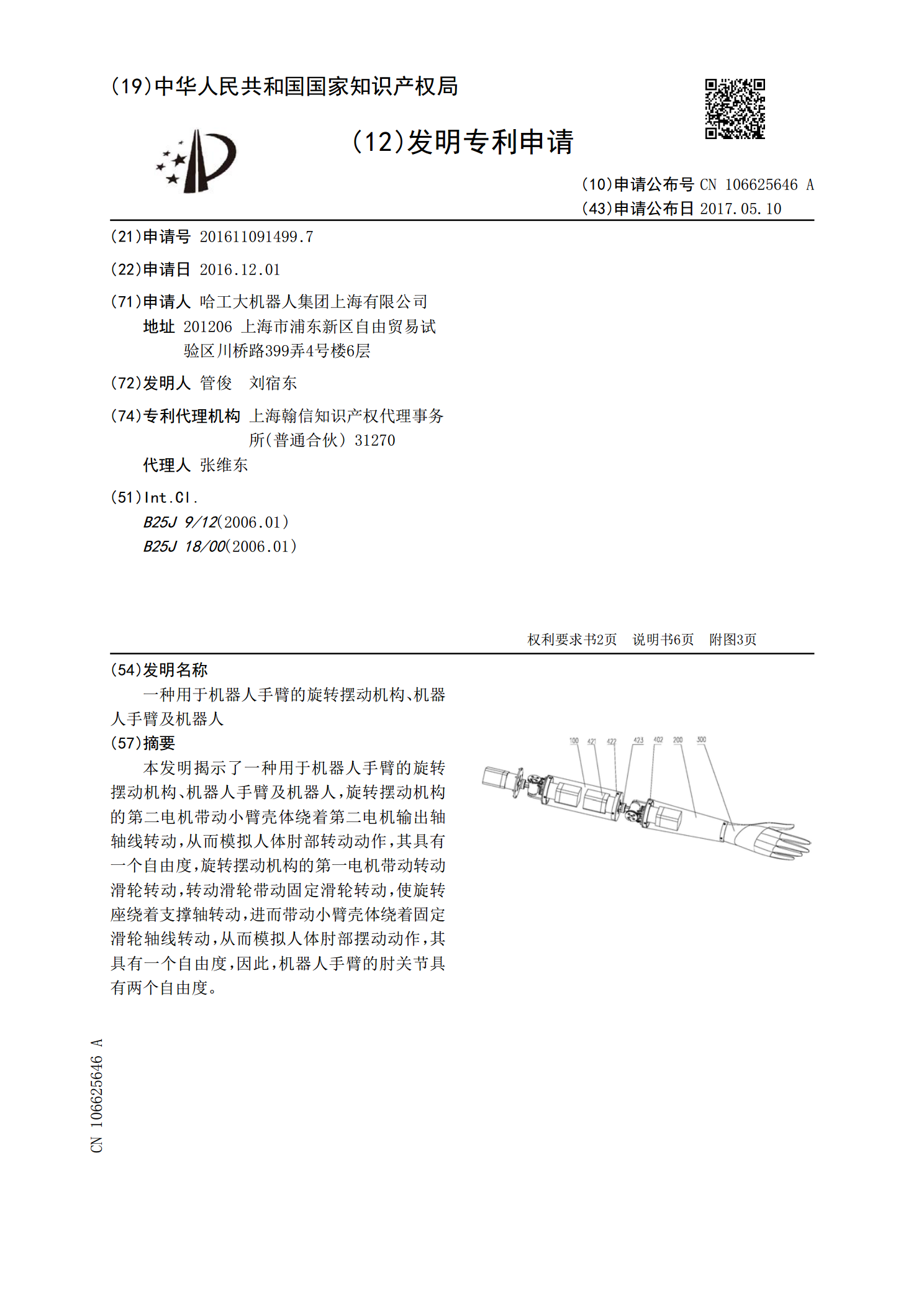
本发明揭示了一种用于机器人手臂的旋转摆动机构、机器人手臂及机器人,旋转摆动机构的第二电机带动小臂壳体绕着第二电机输出轴轴线转动,从而模拟人体肘部转动动作,其具有一个自由度,旋转摆动机构的第一电机带动转动滑轮转动,转动滑轮带动固定滑轮转动,使旋转座绕着支撑轴转动,进而带动小臂壳体绕着固定滑轮轴线转动,从而模拟人体肘部摆动动作,其具有一个自由度,因此,机器人手臂的肘关节具有两个自由度。
机器人手臂机构及机器人.pdf
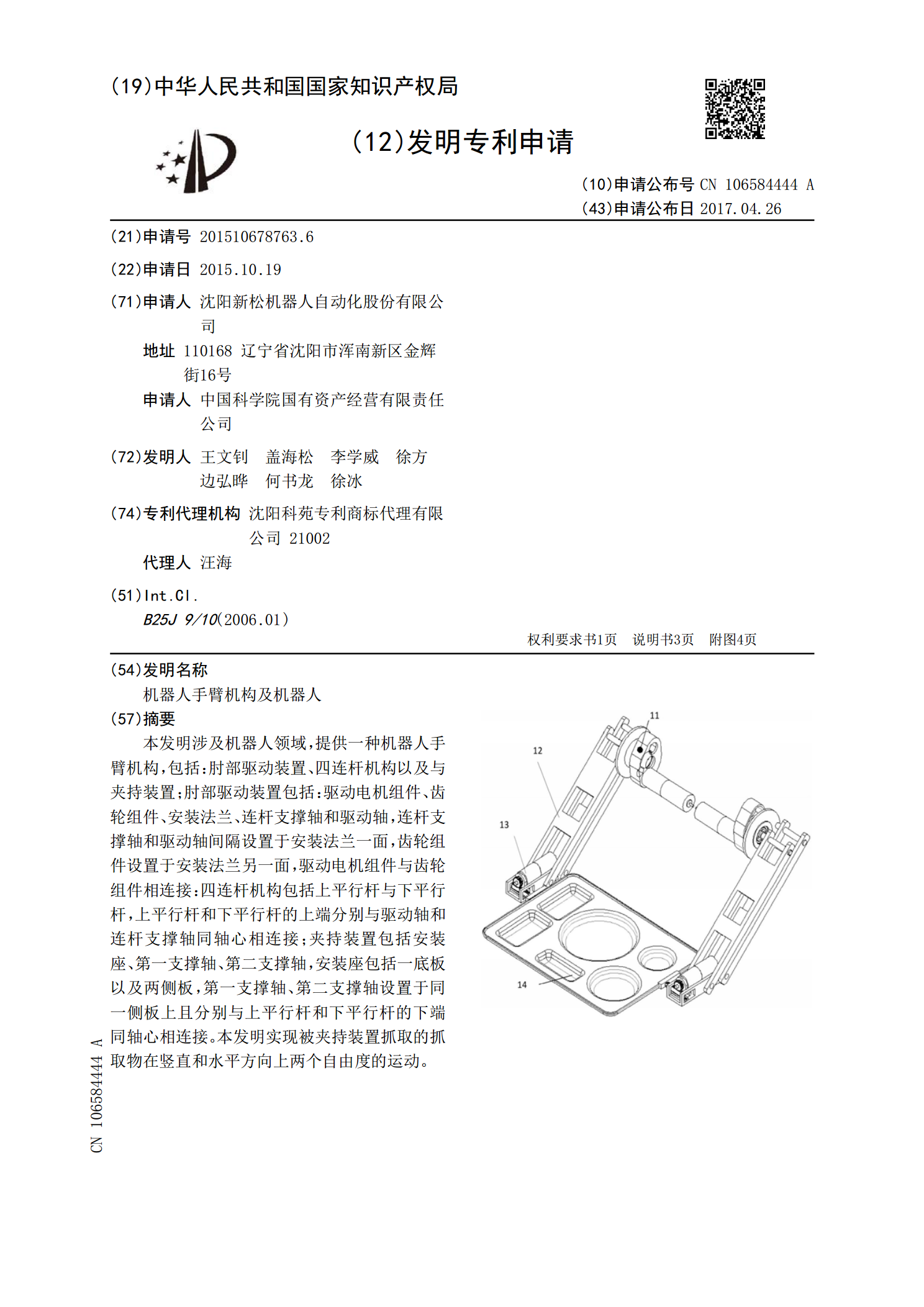
本发明涉及机器人领域,提供一种机器人手臂机构,包括:肘部驱动装置、四连杆机构以及与夹持装置;肘部驱动装置包括:驱动电机组件、齿轮组件、安装法兰、连杆支撑轴和驱动轴,连杆支撑轴和驱动轴间隔设置于安装法兰一面,齿轮组件设置于安装法兰另一面,驱动电机组件与齿轮组件相连接:四连杆机构包括上平行杆与下平行杆,上平行杆和下平行杆的上端分别与驱动轴和连杆支撑轴同轴心相连接;夹持装置包括安装座、第一支撑轴、第二支撑轴,安装座包括一底板以及两侧板,第一支撑轴、第二支撑轴设置于同一侧板上且分别与上平行杆和下平行杆的下端同轴心
机器人手臂机构.pdf
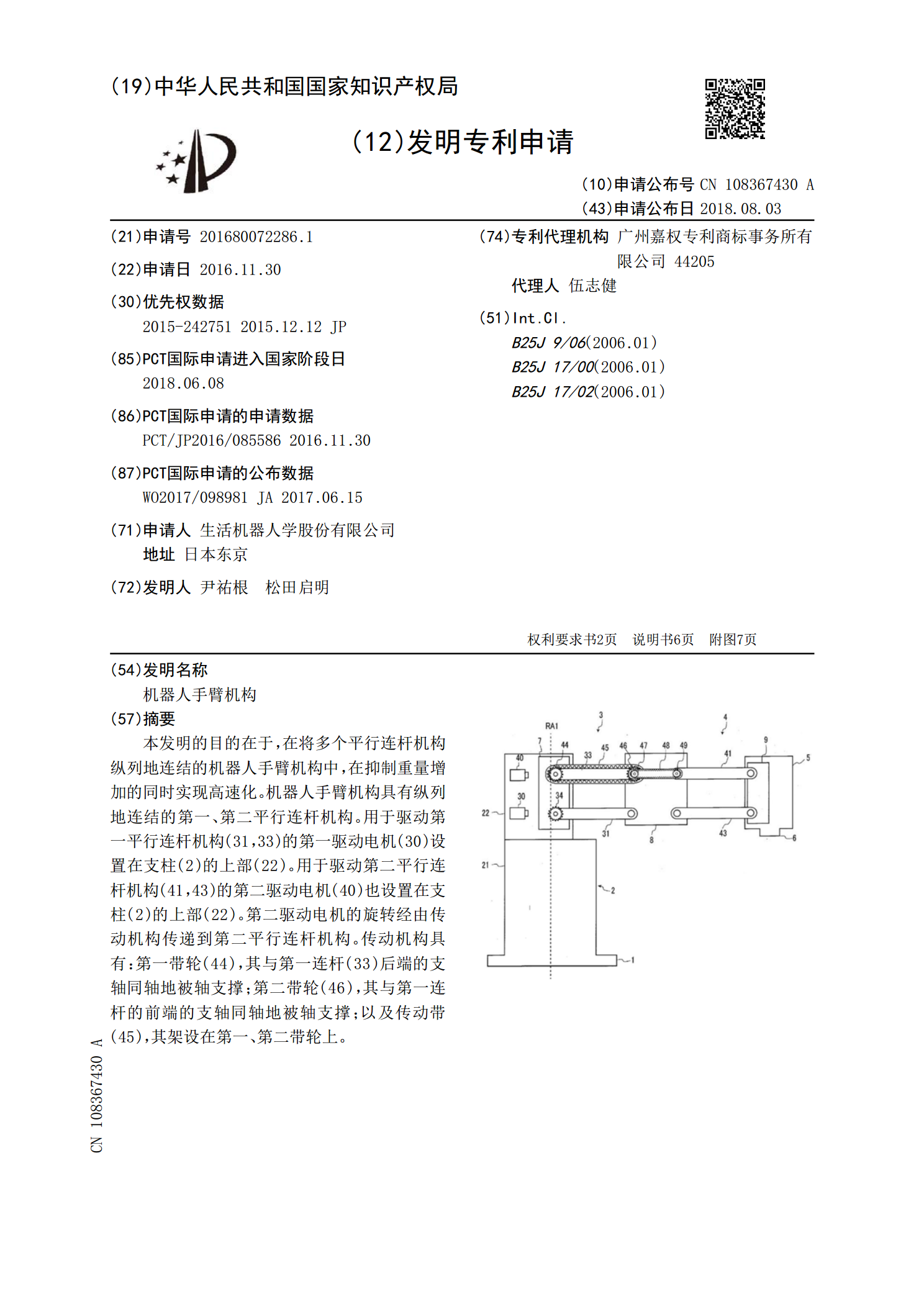
本发明的目的在于,在将多个平行连杆机构纵列地连结的机器人手臂机构中,在抑制重量增加的同时实现高速化。机器人手臂机构具有纵列地连结的第一、第二平行连杆机构。用于驱动第一平行连杆机构(31,33)的第一驱动电机(30)设置在支柱(2)的上部(22)。用于驱动第二平行连杆机构(41,43)的第二驱动电机(40)也设置在支柱(2)的上部(22)。第二驱动电机的旋转经由传动机构传递到第二平行连杆机构。传动机构具有:第一带轮(44),其与第一连杆(33)后端的支轴同轴地被轴支撑;第二带轮(46),其与第一连杆的前端的

用于洗澡机器人的手臂机构以及洗澡机器人.pdf
本发明涉及一种用于洗澡机器人的手臂机构,其包括手臂、用于驱动手臂上下移动的驱动装置以及引导手臂沿上下方向移动的引导装置,所述驱动装置包括施力轮、同步轮以及将施力轮和同步轮连接起来的皮带,所述手臂固定在皮带的一侧上。本发明还涉及一种包括上述手臂机构的洗澡机器人。本发明用于洗澡机器人的手臂机构以及洗澡机器人设计新颖,实用性强,其通过将手臂上下移动以适应不同身高的人使用,同时也可以满足清洗身体的不同部位。

一种机器人手臂机构.pdf
一种机器人手臂机构,属于工业机器人技术领域。包括驱动单元和两手臂组件,所述两手臂组件均包括大臂、小臂及末端执行器,在大臂和小臂内均设有同步带轮,所述两手臂组件的大臂同轴设置,其大臂伸缩驱动轴分别与其大臂内的带轮连接,两大臂外壳分别与其回转驱动轴连接,形成四轴同轴结构,四个驱动轴分别与驱动单元内各自独立的驱动机构连接。本发明两个手臂组件回转、伸缩驱动各自独立,上下交叉布置,分别在两个不同的回转平面绕共同旋转轴作回转运动和径向伸缩运动,形成本发明具有四个自由度的手臂机构,在其中一个手臂在进行一个工位的取放片的