
一种自适应差速底盘结构.pdf

一只****写意

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自适应差速底盘结构.pdf
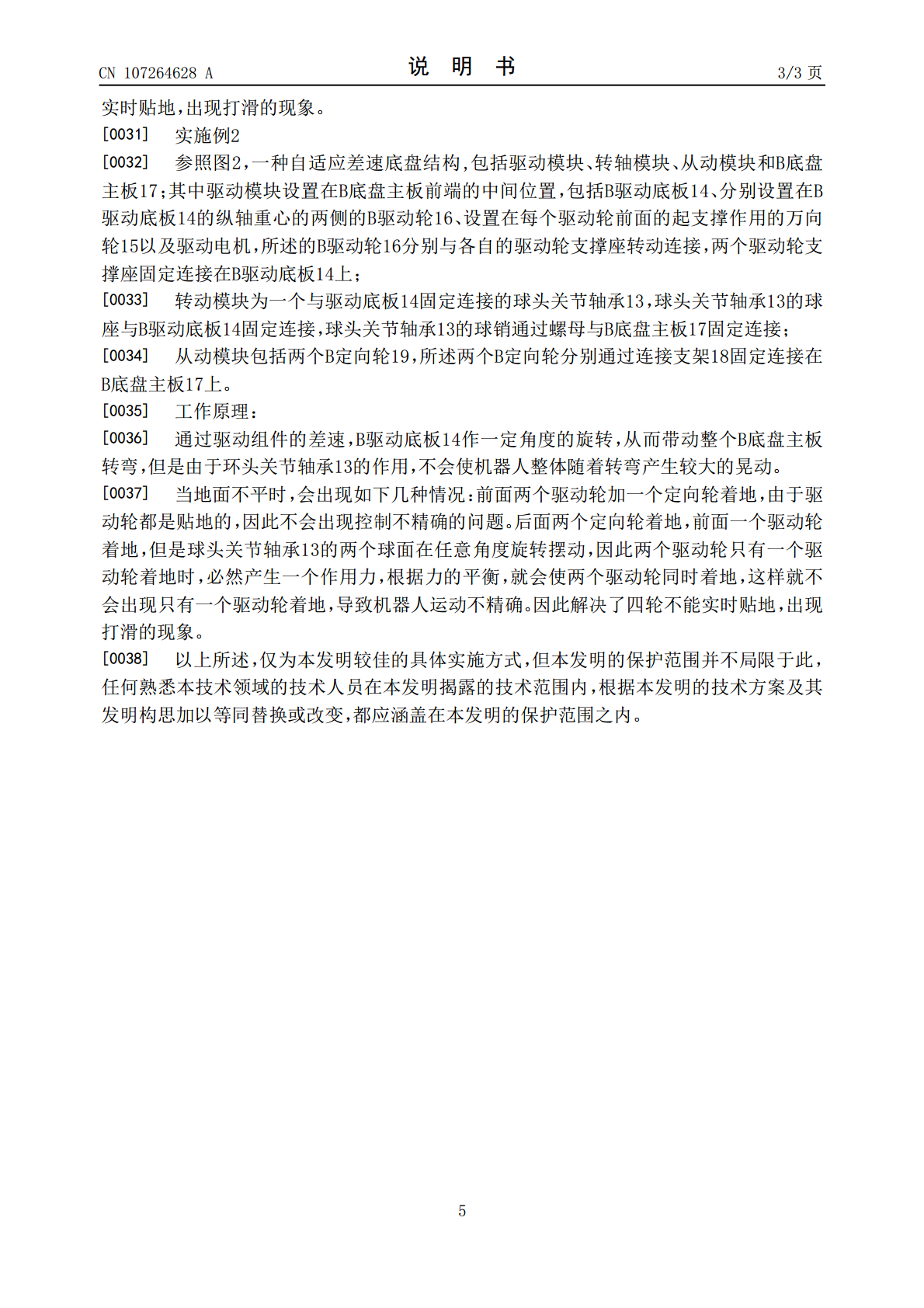
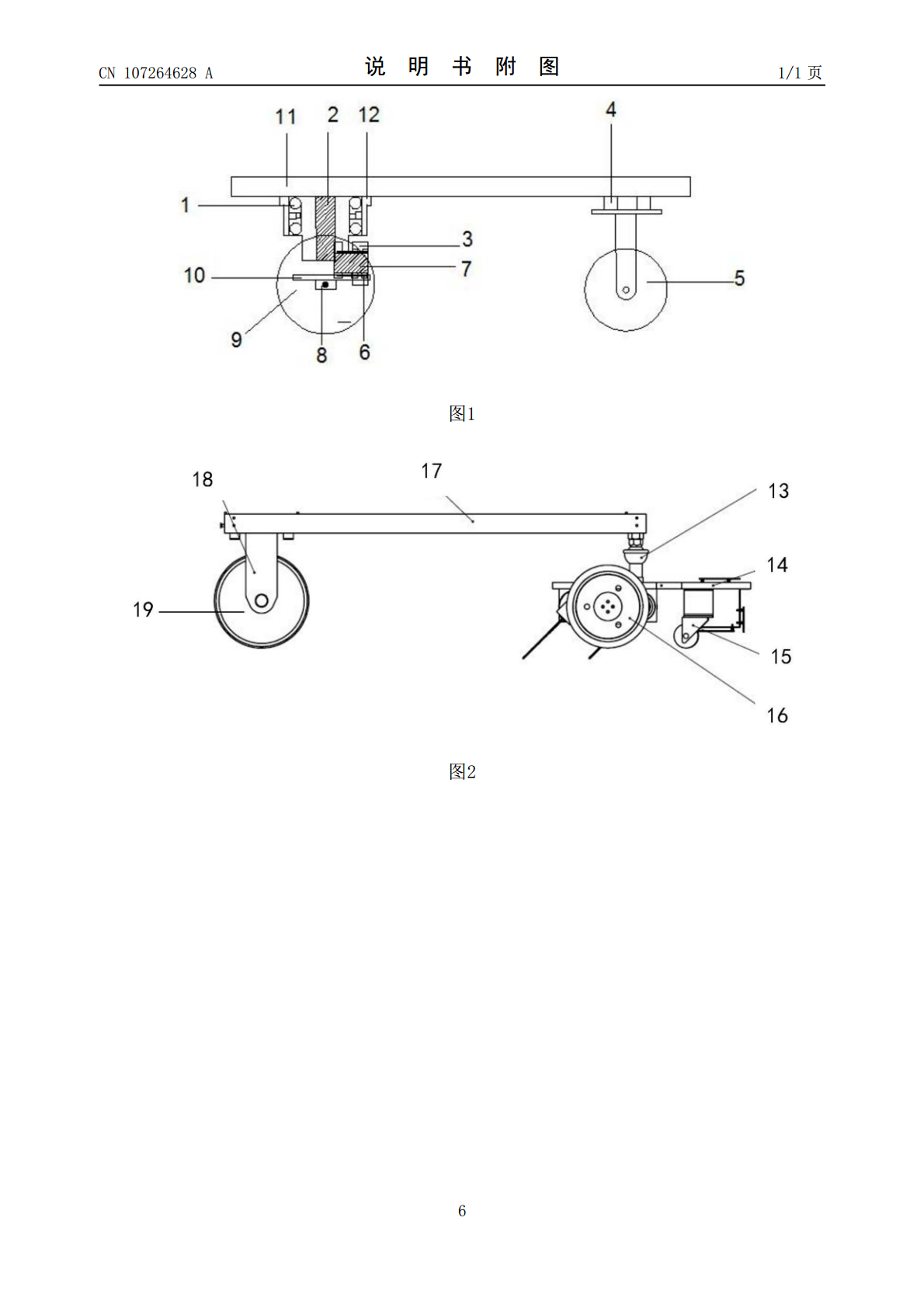
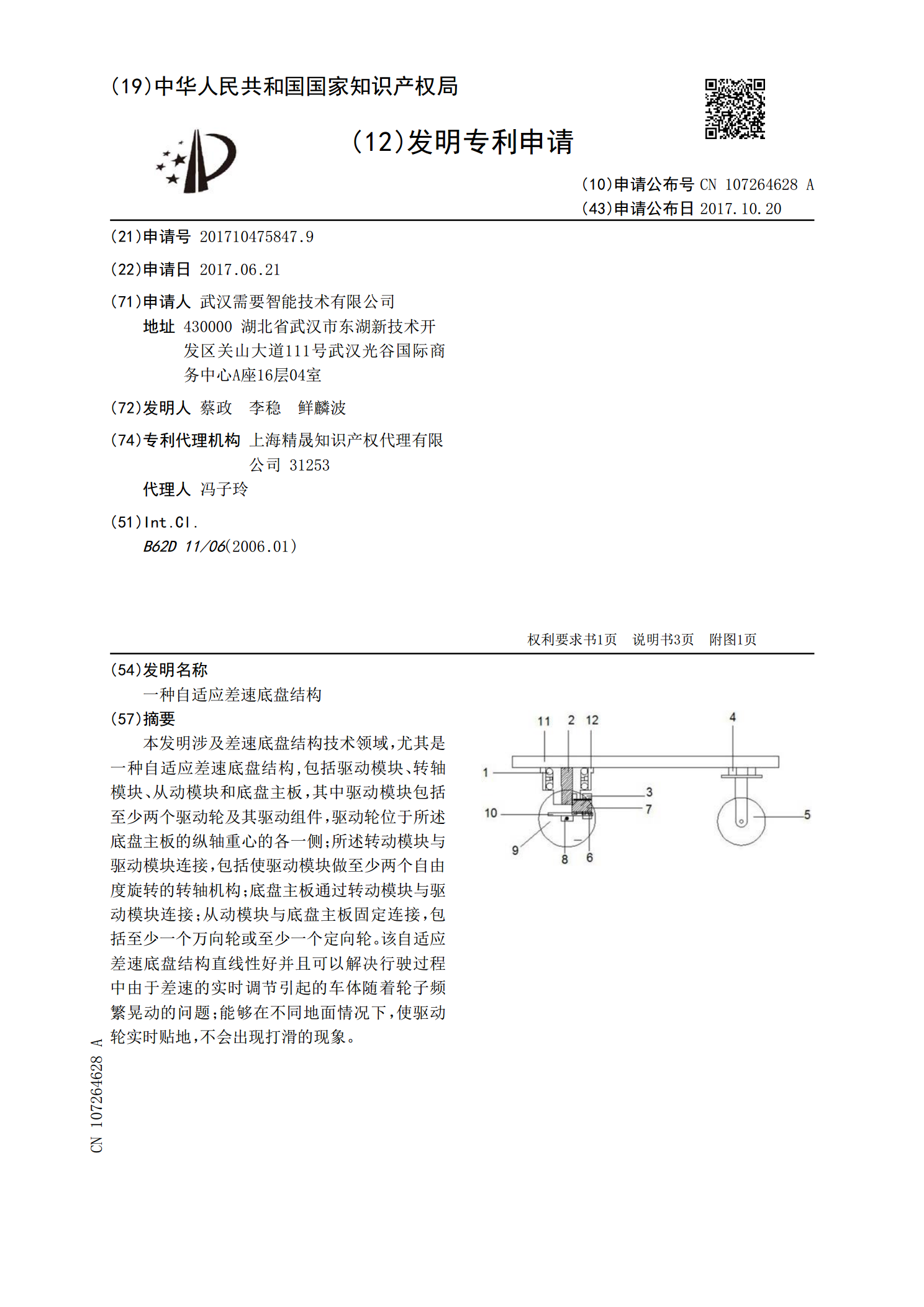
本发明涉及差速底盘结构技术领域,尤其是一种自适应差速底盘结构,包括驱动模块、转轴模块、从动模块和底盘主板,其中驱动模块包括至少两个驱动轮及其驱动组件,驱动轮位于所述底盘主板的纵轴重心的各一侧;所述转动模块与驱动模块连接,包括使驱动模块做至少两个自由度旋转的转轴机构;底盘主板通过转动模块与驱动模块连接;从动模块与底盘主板固定连接,包括至少一个万向轮或至少一个定向轮。该自适应差速底盘结构直线性好并且可以解决行驶过程中由于差速的实时调节引起的车体随着轮子频繁晃动的问题;能够在不同地面情况下,使驱动轮实时贴地,不
差速轮及其底盘.pdf
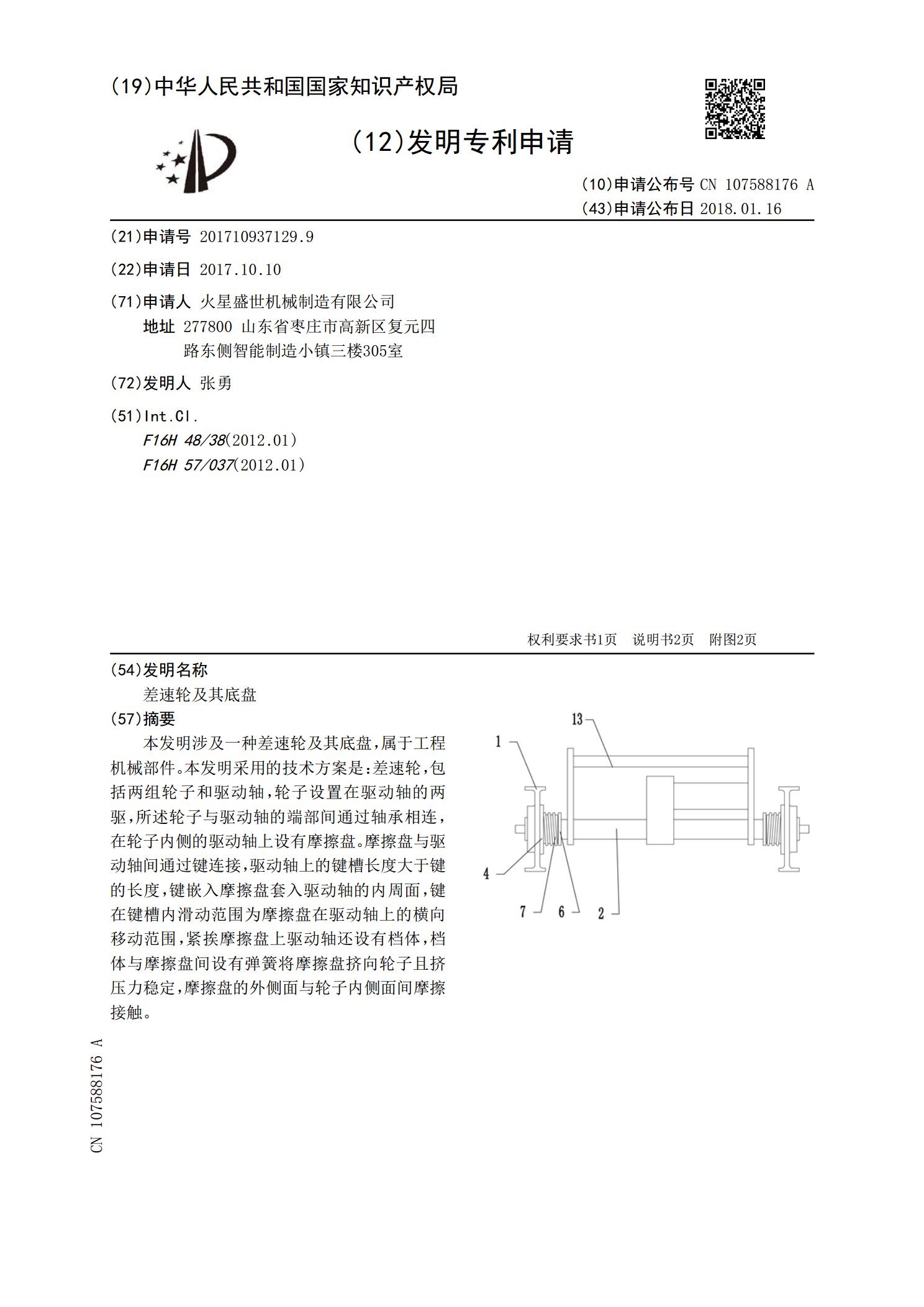
本发明涉及一种差速轮及其底盘,属于工程机械部件。本发明采用的技术方案是:差速轮,包括两组轮子和驱动轴,轮子设置在驱动轴的两驱,所述轮子与驱动轴的端部间通过轴承相连,在轮子内侧的驱动轴上设有摩擦盘。摩擦盘与驱动轴间通过键连接,驱动轴上的键槽长度大于键的长度,键嵌入摩擦盘套入驱动轴的内周面,键在键槽内滑动范围为摩擦盘在驱动轴上的横向移动范围,紧挨摩擦盘上驱动轴还设有档体,档体与摩擦盘间设有弹簧将摩擦盘挤向轮子且挤压力稳定,摩擦盘的外侧面与轮子内侧面间摩擦接触。
一种电磁差速式自适应管道装置.pdf
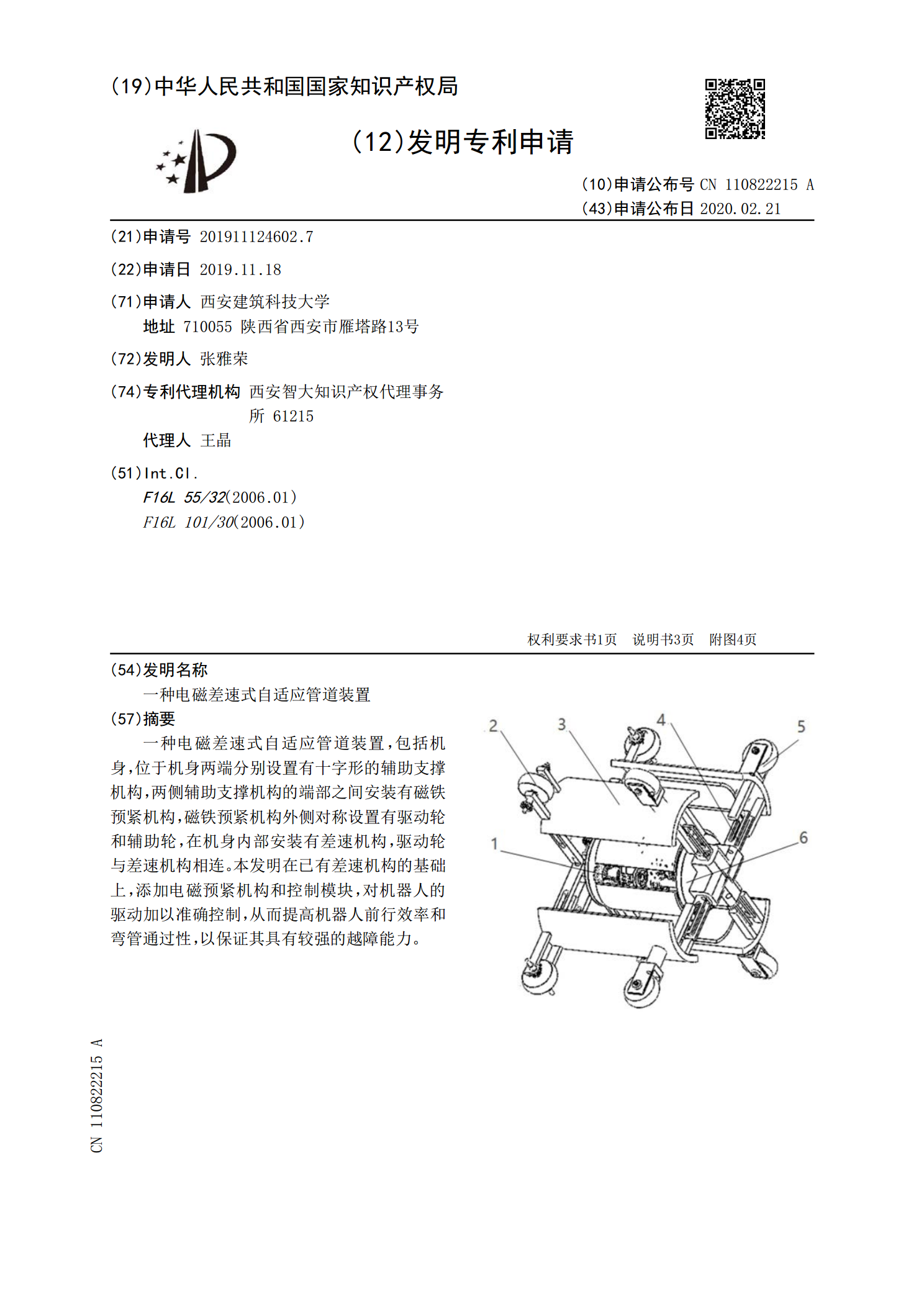
一种电磁差速式自适应管道装置,包括机身,位于机身两端分别设置有十字形的辅助支撑机构,两侧辅助支撑机构的端部之间安装有磁铁预紧机构,磁铁预紧机构外侧对称设置有驱动轮和辅助轮,在机身内部安装有差速机构,驱动轮与差速机构相连。本发明在已有差速机构的基础上,添加电磁预紧机构和控制模块,对机器人的驱动加以准确控制,从而提高机器人前行效率和弯管通过性,以保证其具有较强的越障能力。

着陆器用差速自适应机构.pdf
本发明提供了一种着陆器用差速自适应机构,包括主差速系统、两个副差速系统、基体、支脚结构和竖直向设置的主齿条和副齿条;所述主差速系统至少包括两个同步传动的主齿轮,两个所述主齿轮同步传动,每个所述副差速系统均至少包括两个副齿轮,每个所述副差速系统中的两个副齿轮同步传动;每个所述主齿条与一个所述副差速系统的位置固定,每个所述主齿条与一个所述主齿轮啮合,进而随着所述主齿轮的旋转实现竖直向移动;每个所述副齿条的下端均连接一个所述支脚结构,且与一个所述副齿轮啮合,进而随着所述副齿轮的旋转实现竖直向移动。

自适应电子差速控制系统.pdf
本发明公开了一种自适应电子差速控制系统,包括整车控制器、上位机、两个逆变器以及与两个驱动轮对应的两个驱动电机,所述上位机与所述整车控制系统连接,所述上位机还通过CAN总线与所述两个逆变器连接,通过逆变器控制驱动电机的运转。本发明通过两驱动轮滑移率之差来作为汽车转向信号,实现自适应转向切换;直行时,可保证轮速与车速间的同步,同时电机出力跟随运动时所受阻力矩实时变化,达到运行平稳;在弯行时,通过基于最佳滑移率转矩控制模式,用以实时修正转矩指令,以控制滑移率达到最佳位置,实现平稳转向。另外,本发明基于滑移率的自