
一种电磁差速式自适应管道装置.pdf

书生****35

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电磁差速式自适应管道装置.pdf
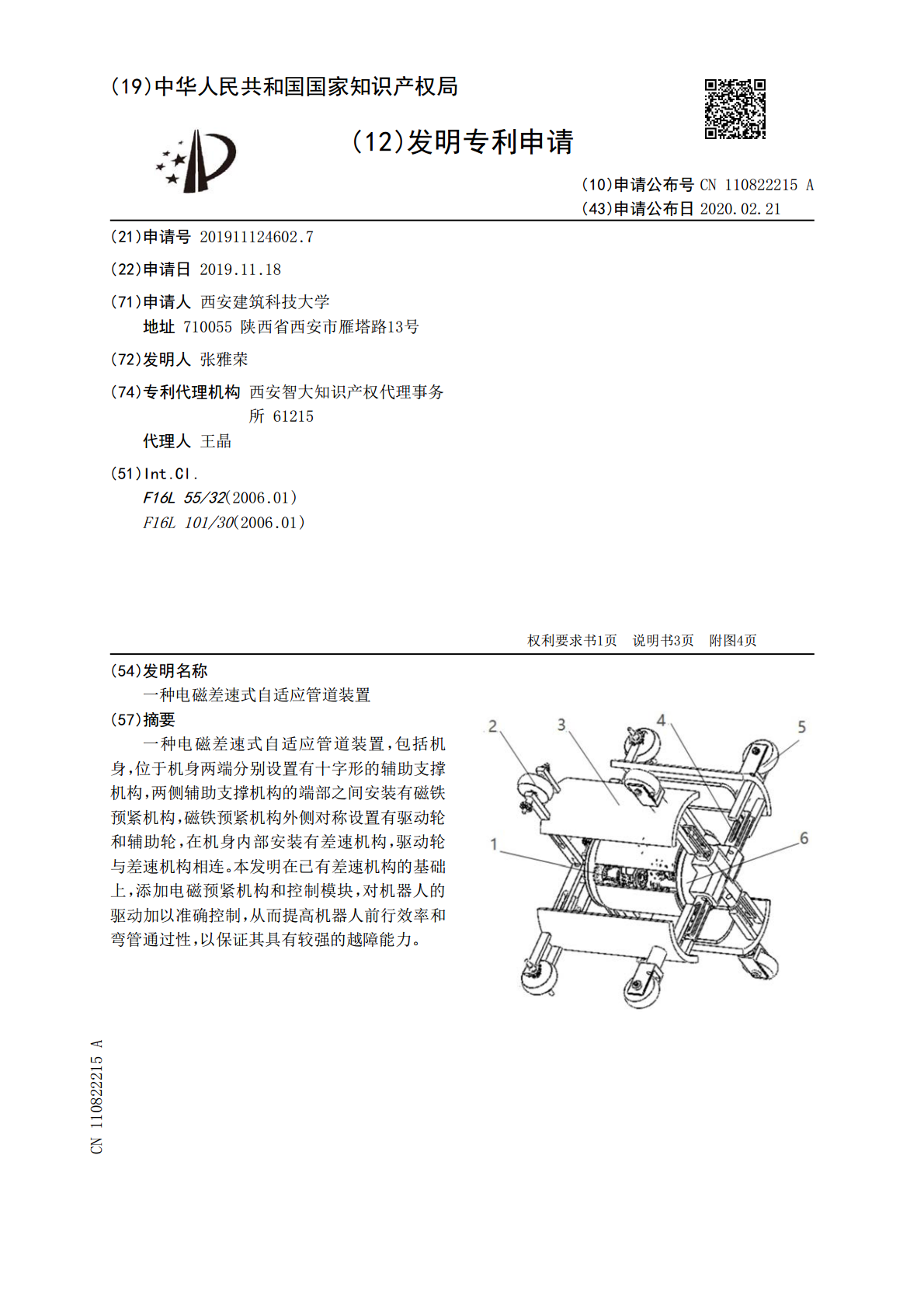
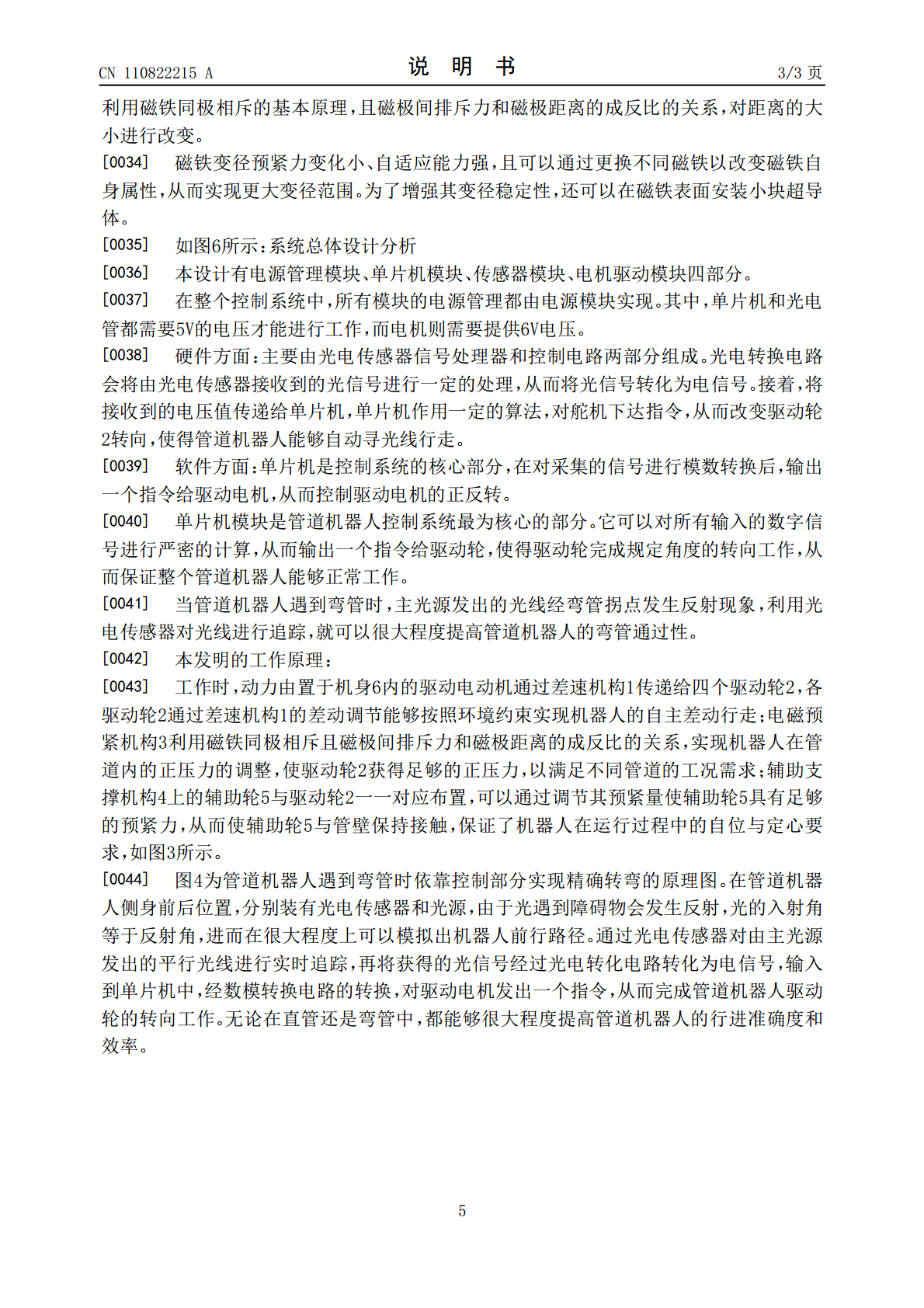
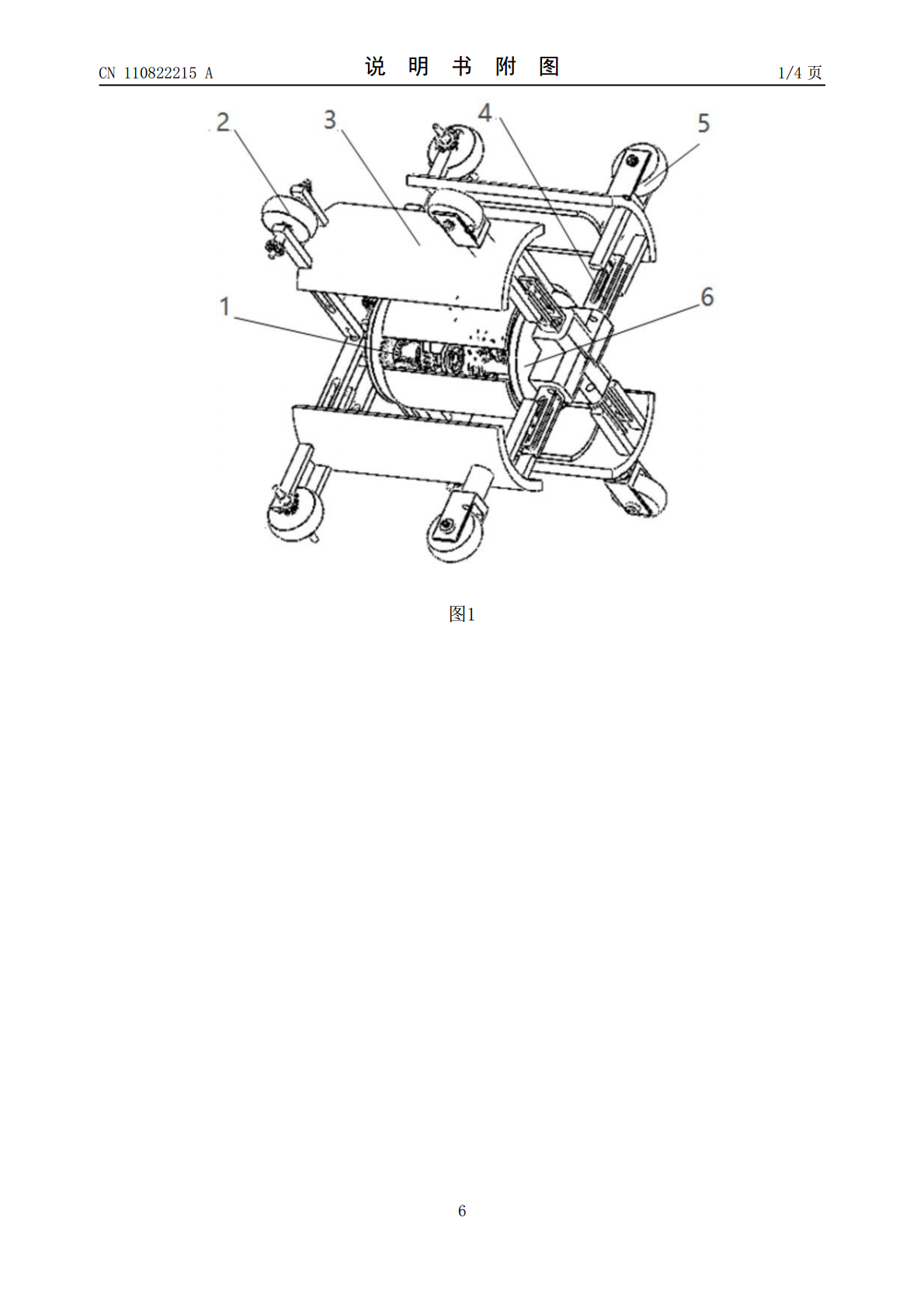
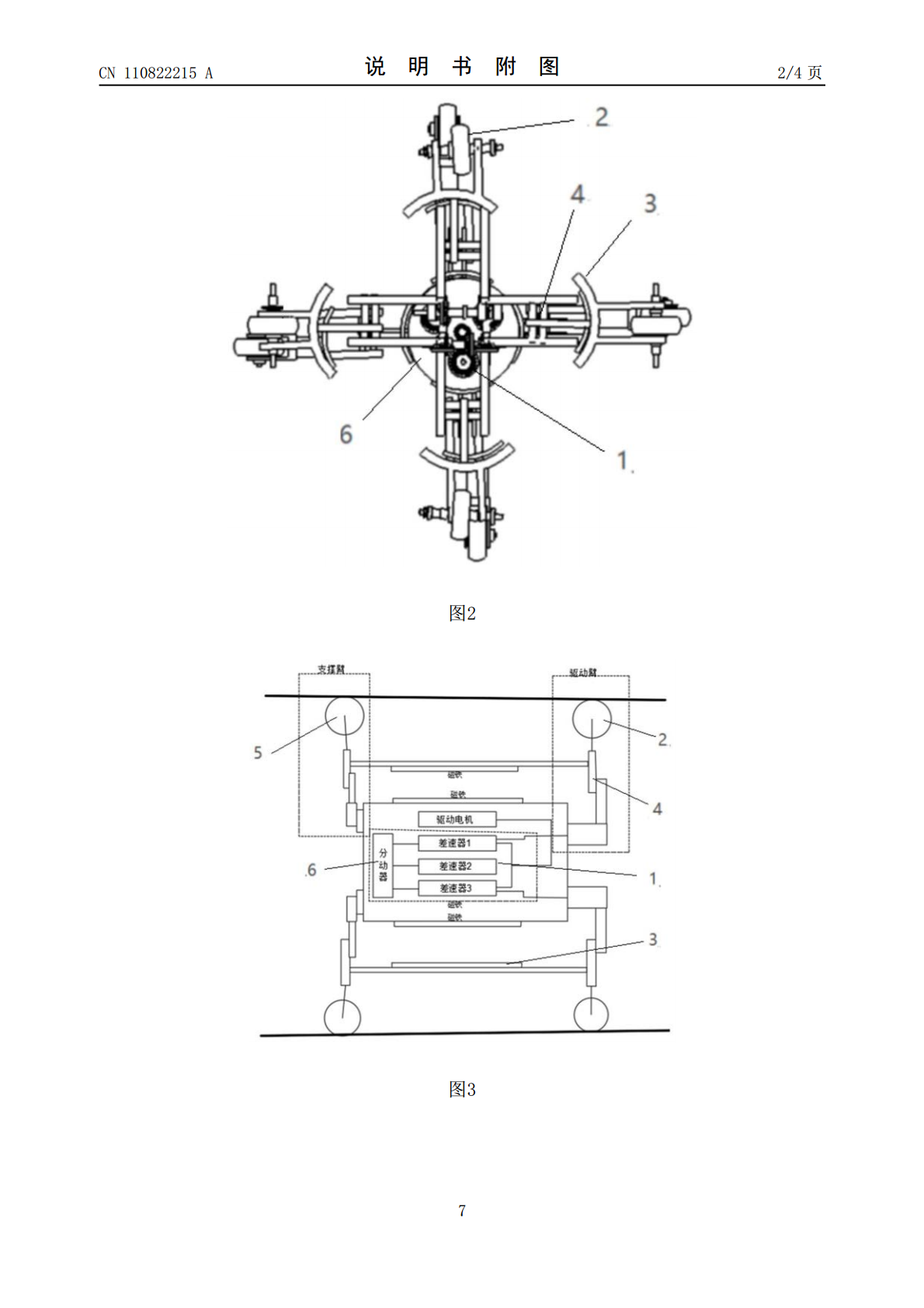
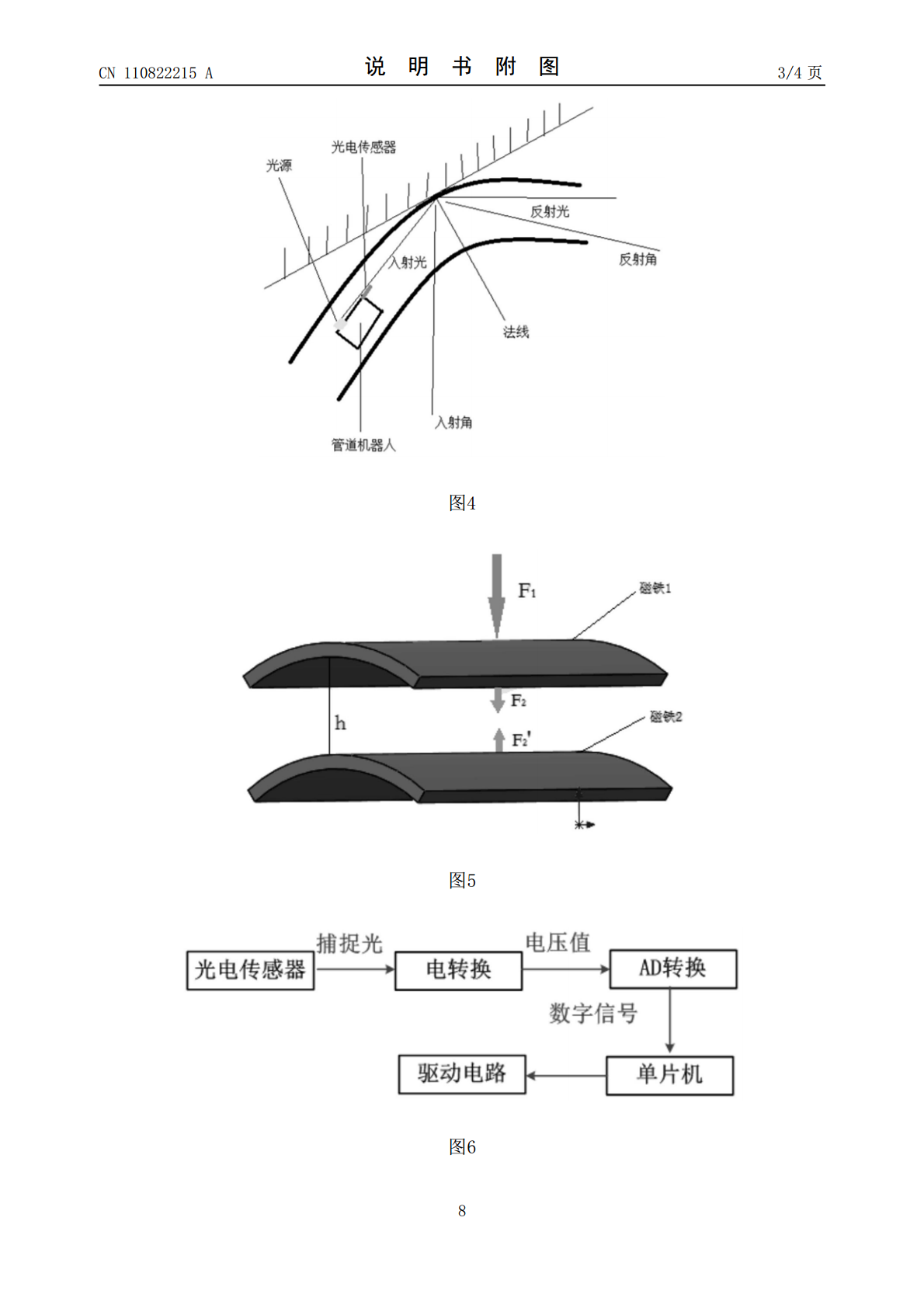
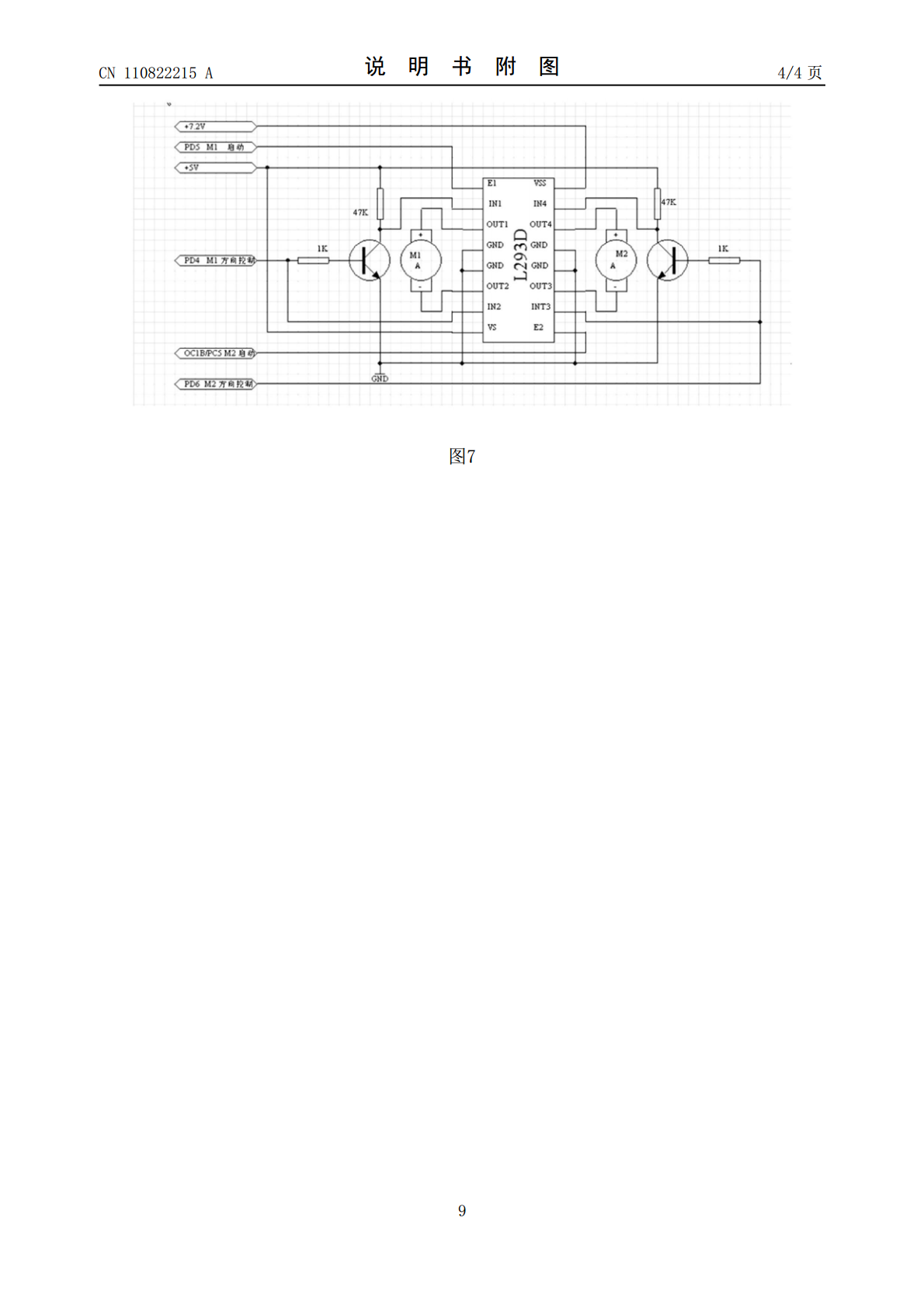
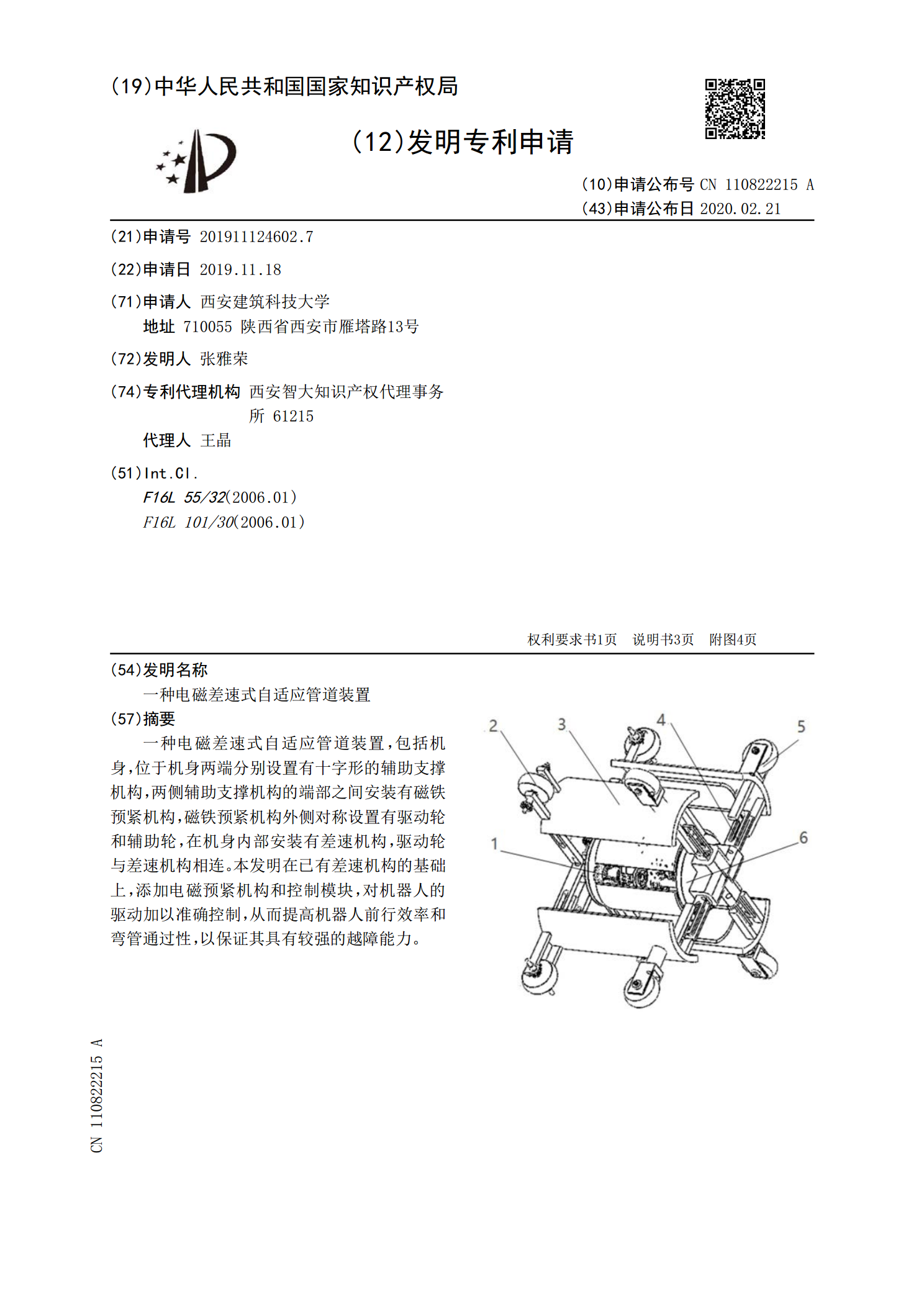
一种电磁差速式自适应管道装置,包括机身,位于机身两端分别设置有十字形的辅助支撑机构,两侧辅助支撑机构的端部之间安装有磁铁预紧机构,磁铁预紧机构外侧对称设置有驱动轮和辅助轮,在机身内部安装有差速机构,驱动轮与差速机构相连。本发明在已有差速机构的基础上,添加电磁预紧机构和控制模块,对机器人的驱动加以准确控制,从而提高机器人前行效率和弯管通过性,以保证其具有较强的越障能力。
一种平底整体桥式差速装置.pdf
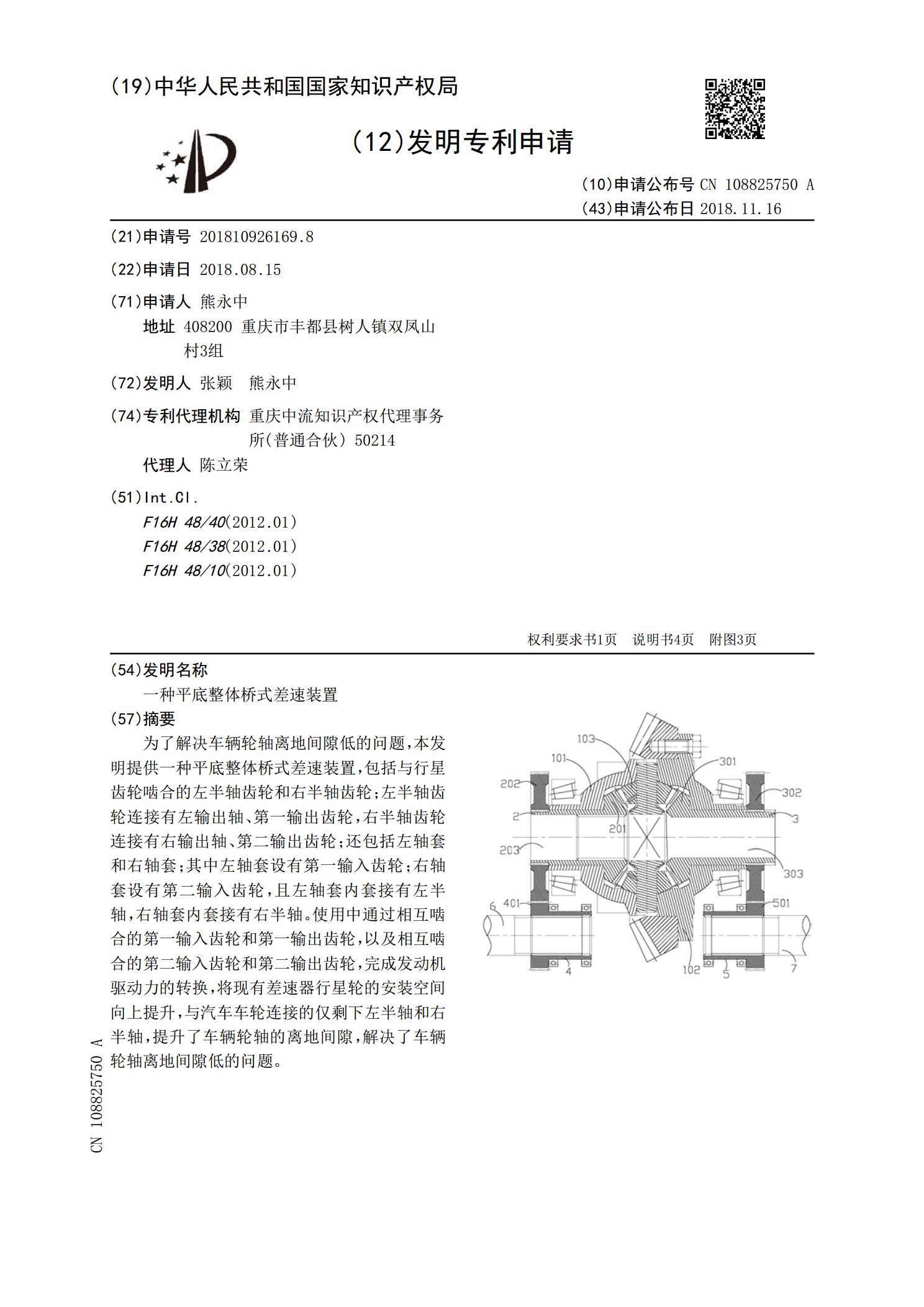
为了解决车辆轮轴离地间隙低的问题,本发明提供一种平底整体桥式差速装置,包括与行星齿轮啮合的左半轴齿轮和右半轴齿轮;左半轴齿轮连接有左输出轴、第一输出齿轮,右半轴齿轮连接有右输出轴、第二输出齿轮;还包括左轴套和右轴套;其中左轴套设有第一输入齿轮;右轴套设有第二输入齿轮,且左轴套内套接有左半轴,右轴套内套接有右半轴。使用中通过相互啮合的第一输入齿轮和第一输出齿轮,以及相互啮合的第二输入齿轮和第二输出齿轮,完成发动机驱动力的转换,将现有差速器行星轮的安装空间向上提升,与汽车车轮连接的仅剩下左半轴和右半轴,提升了
一种便携式差速搅拌装置.pdf
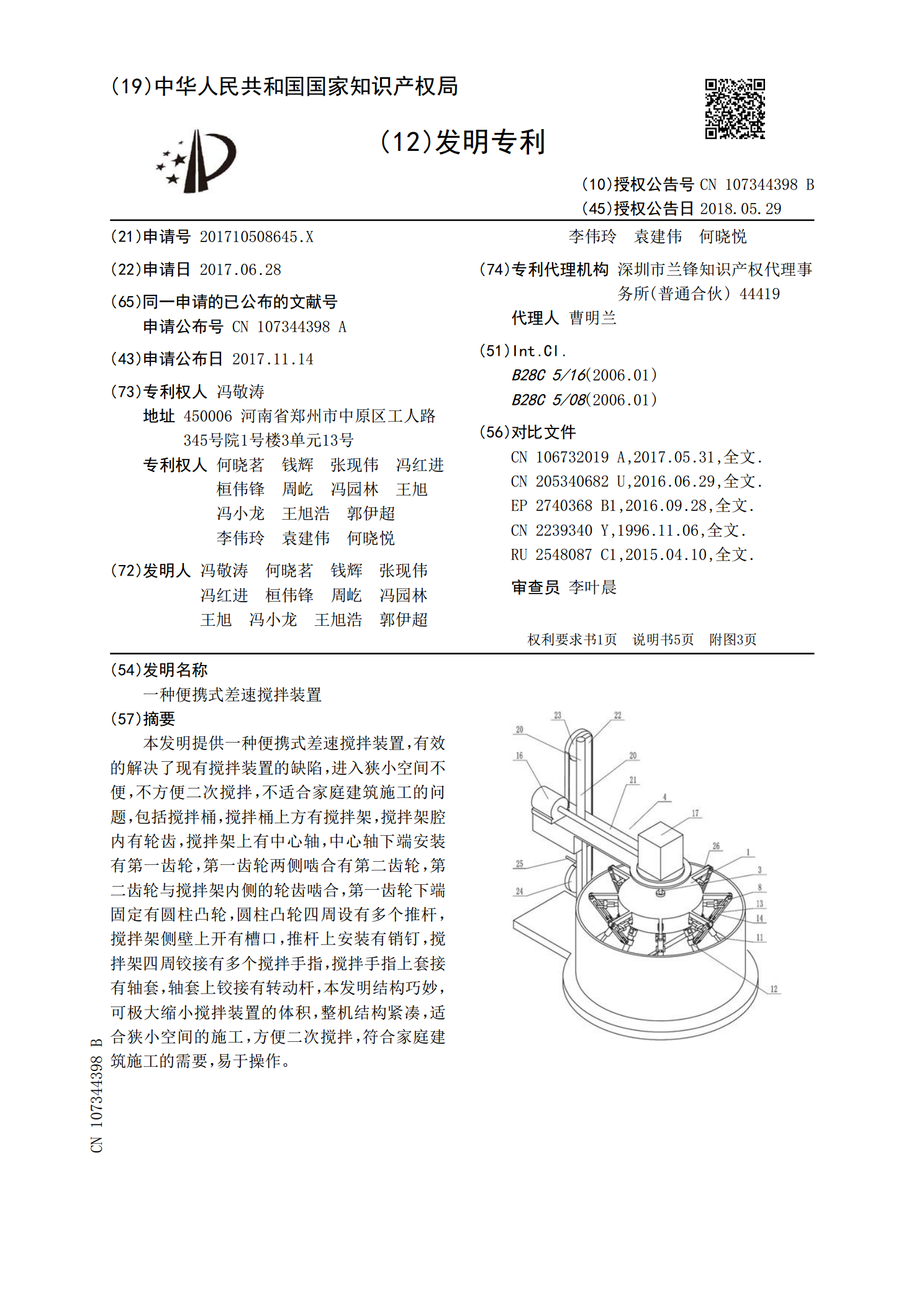
本发明提供一种便携式差速搅拌装置,有效的解决了现有搅拌装置的缺陷,进入狭小空间不便,不方便二次搅拌,不适合家庭建筑施工的问题,包括搅拌桶,搅拌桶上方有搅拌架,搅拌架腔内有轮齿,搅拌架上有中心轴,中心轴下端安装有第一齿轮,第一齿轮两侧啮合有第二齿轮,第二齿轮与搅拌架内侧的轮齿啮合,第一齿轮下端固定有圆柱凸轮,圆柱凸轮四周设有多个推杆,搅拌架侧壁上开有槽口,推杆上安装有销钉,搅拌架四周铰接有多个搅拌手指,搅拌手指上套接有轴套,轴套上铰接有转动杆,本发明结构巧妙,可极大缩小搅拌装置的体积,整机结构紧凑,适合狭小

差速式双绞刀挖泥装置.pdf
本发明提供一种差速式双绞刀挖泥装置,它包括电机和绞刀,其特征在于:它还包括差速器,其中电机的从动轮与差速器的差速器壳固定连接从而带动差速器运转,差速器的2个半轴齿轮分别通过绞刀齿轮与2个绞刀连接。本发明通过增加差速器,一个电机输入的转速和功率通过差速器传输至位于差速器两侧的2个绞刀上,使得一个电机能够带动2个绞刀,从而减少了挖泥装置中的电机数量,节约成本。
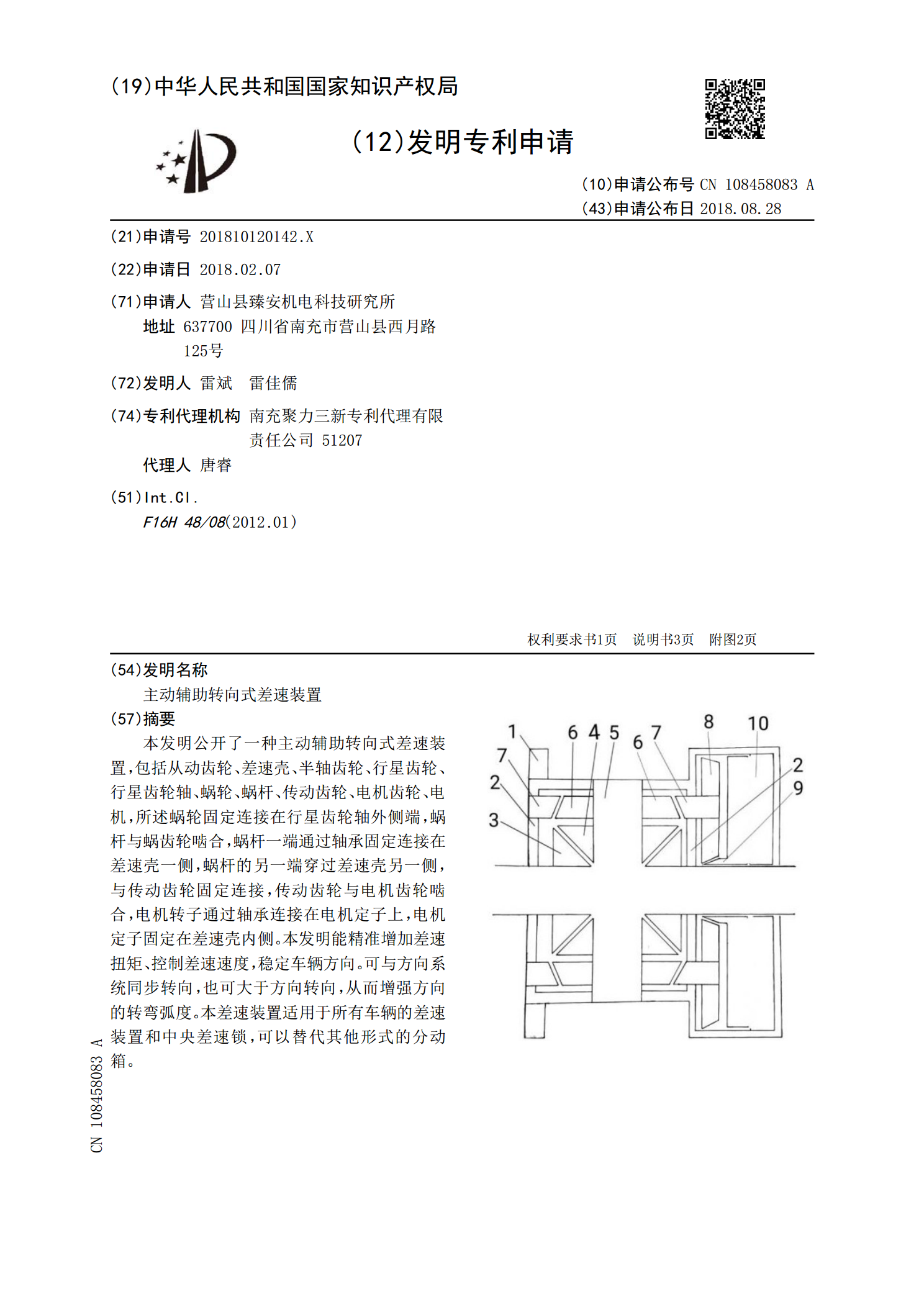
主动辅助转向式差速装置.pdf
本发明公开了一种主动辅助转向式差速装置,包括从动齿轮、差速壳、半轴齿轮、行星齿轮、行星齿轮轴、蜗轮、蜗杆、传动齿轮、电机齿轮、电机,所述蜗轮固定连接在行星齿轮轴外侧端,蜗杆与蜗齿轮啮合,蜗杆一端通过轴承固定连接在差速壳一侧,蜗杆的另一端穿过差速壳另一侧,与传动齿轮固定连接,传动齿轮与电机齿轮啮合,电机转子通过轴承连接在电机定子上,电机定子固定在差速壳内侧。本发明能精准增加差速扭矩、控制差速速度,稳定车辆方向。可与方向系统同步转向,也可大于方向转向,从而增强方向的转弯弧度。本差速装置适用于所有车辆的差速装置