
着陆器用差速自适应机构.pdf

玉军****la


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

着陆器用差速自适应机构.pdf
本发明提供了一种着陆器用差速自适应机构,包括主差速系统、两个副差速系统、基体、支脚结构和竖直向设置的主齿条和副齿条;所述主差速系统至少包括两个同步传动的主齿轮,两个所述主齿轮同步传动,每个所述副差速系统均至少包括两个副齿轮,每个所述副差速系统中的两个副齿轮同步传动;每个所述主齿条与一个所述副差速系统的位置固定,每个所述主齿条与一个所述主齿轮啮合,进而随着所述主齿轮的旋转实现竖直向移动;每个所述副齿条的下端均连接一个所述支脚结构,且与一个所述副齿轮啮合,进而随着所述副齿轮的旋转实现竖直向移动。

主动差速机构.pdf
本发明公开了一种主动差速机构,包括正对设置的两个行星轮系,两个所述行星轮系均由太阳轮、行星轮、齿圈和行星架构成,两个行星轮系的太阳轮、齿圈和行星架分别构成太阳轮组件、齿圈组件、行星架组件,其中一组作为输入组件,另外两组中的一组作为输出组件,另一组作为调节组件,组成输入组件的两个相同部件正对设置在输入轴上,组成调节组件的两个相同部件之间设置有调节齿轮,该调节组件的两个相同部件上均设置有一圈外齿,所述调节齿轮通过该外齿与调节组件的两个相同部件相啮合,该调节齿轮连接在驱动机构的输出端。本发明结构简单,传动稳定性

自适应电子差速控制系统.pdf
本发明公开了一种自适应电子差速控制系统,包括整车控制器、上位机、两个逆变器以及与两个驱动轮对应的两个驱动电机,所述上位机与所述整车控制系统连接,所述上位机还通过CAN总线与所述两个逆变器连接,通过逆变器控制驱动电机的运转。本发明通过两驱动轮滑移率之差来作为汽车转向信号,实现自适应转向切换;直行时,可保证轮速与车速间的同步,同时电机出力跟随运动时所受阻力矩实时变化,达到运行平稳;在弯行时,通过基于最佳滑移率转矩控制模式,用以实时修正转矩指令,以控制滑移率达到最佳位置,实现平稳转向。另外,本发明基于滑移率的自

四驱差速机构.pdf
本发明公开了一种四驱差速机构,主要解决轮式车辆在路况恶劣、泥泞的路面上容易发生多个车轮打滑而无法行驶的问题。它包括一个输入轴、三个差速机构和四个输出机构组成;其中每个差速机构由对立布置的两个差速行星齿轮和两个压盘组成,相邻的差速行星齿轮和压盘相互啮合;每个输出机构由输出轴、设于输出轴一端的输出齿轮以及与输出齿轮啮合的输出压盘(15)组成。动力由输入轴输入,通过差速机构差速,再通过输出机构输出,每个输出机构的动力来源相互独立、互不影响,从而实现四驱差速。本发明具有结构简单、维护方便、三轮打滑也可实现动力输出
差速调校机构及手表.pdf
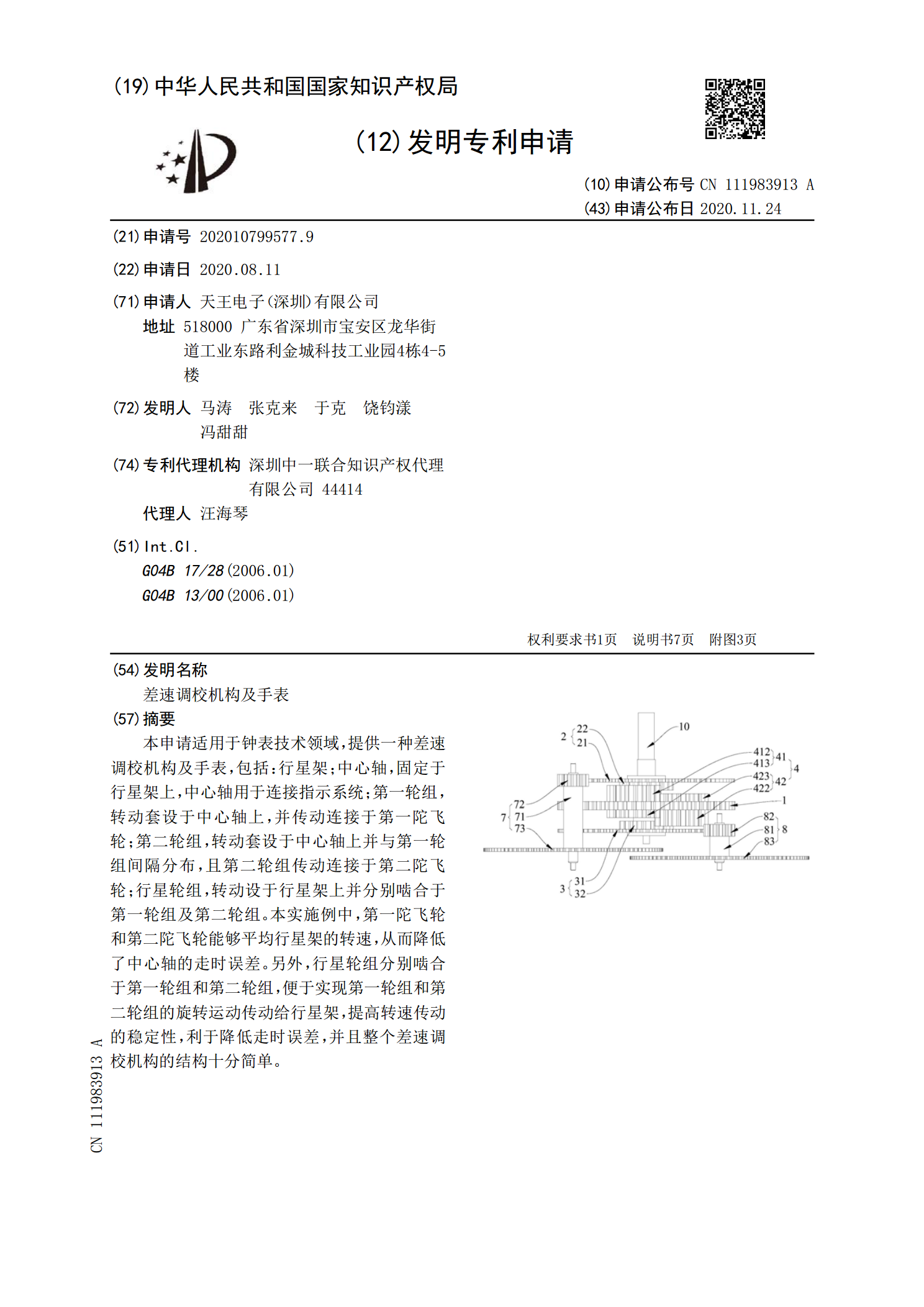
本申请适用于钟表技术领域,提供一种差速调校机构及手表,包括:行星架;中心轴,固定于行星架上,中心轴用于连接指示系统;第一轮组,转动套设于中心轴上,并传动连接于第一陀飞轮;第二轮组,转动套设于中心轴上并与第一轮组间隔分布,且第二轮组传动连接于第二陀飞轮;行星轮组,转动设于行星架上并分别啮合于第一轮组及第二轮组。本实施例中,第一陀飞轮和第二陀飞轮能够平均行星架的转速,从而降低了中心轴的走时误差。另外,行星轮组分别啮合于第一轮组和第二轮组,便于实现第一轮组和第二轮组的旋转运动传动给行星架,提高转速传动的稳定性,