
自适应电子差速控制系统.pdf

Ch****49


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自适应电子差速控制系统.pdf
本发明公开了一种自适应电子差速控制系统,包括整车控制器、上位机、两个逆变器以及与两个驱动轮对应的两个驱动电机,所述上位机与所述整车控制系统连接,所述上位机还通过CAN总线与所述两个逆变器连接,通过逆变器控制驱动电机的运转。本发明通过两驱动轮滑移率之差来作为汽车转向信号,实现自适应转向切换;直行时,可保证轮速与车速间的同步,同时电机出力跟随运动时所受阻力矩实时变化,达到运行平稳;在弯行时,通过基于最佳滑移率转矩控制模式,用以实时修正转矩指令,以控制滑移率达到最佳位置,实现平稳转向。另外,本发明基于滑移率的自

自适应电子差速控制方法及上位机.pdf
本发明公开了一种自适应电子差速控制方法及上位机,本发明结合速度控制下的转矩自适应及转矩控制下的转速自适应,实现自适应差速控制。本发明通过两驱动轮滑移率之差来作为汽车转向信号,实现自适应转向切换;直行时,可保证轮速与车速间的同步,同时电机出力跟随运动时所受阻力矩实时变化,达到运行平稳;在弯行时,通过基于最佳滑移率转矩控制模式,用以实时修正转矩指令,以控制滑移率达到最佳位置,实现平稳转向。另外,本发明基于滑移率的自适应转向控制,不需要转向传感器,可节省成本。

电动轮驱动汽车的电子差速控制系统.pdf
本发明涉及电动轮驱动汽车的电子差速控制系统,它包括控制器、各轮毂电机的电机控制器、用于测量方向盘转角的转角传感器、能输出开度值的电子加速踏板、用于测量轮毂电机实际转速的转速传感器;电子加速踏板、转速传感器、转角传感器的信号输出端分别和控制器的信号输入端连接,控制器与各轮毂电机控制器通讯连接;所述控制器包括第一级跟随控制模块和第二级跟随控制模块。本发明可对各驱动电机进行合理的电子差速控制。
轮毂驱动电动汽车的电子差速控制系统.pdf
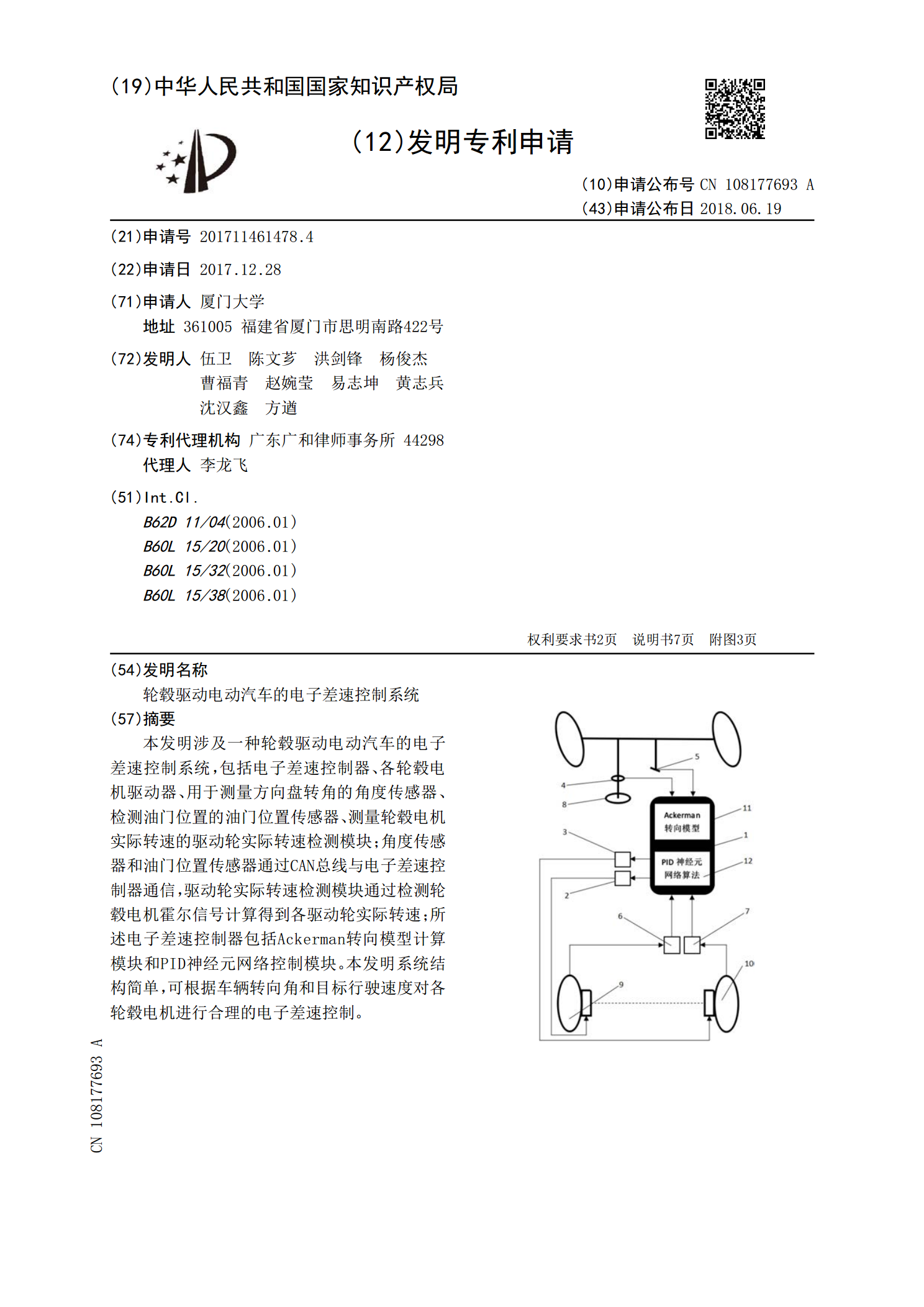
本发明涉及一种轮毂驱动电动汽车的电子差速控制系统,包括电子差速控制器、各轮毂电机驱动器、用于测量方向盘转角的角度传感器、检测油门位置的油门位置传感器、测量轮毂电机实际转速的驱动轮实际转速检测模块;角度传感器和油门位置传感器通过CAN总线与电子差速控制器通信,驱动轮实际转速检测模块通过检测轮毂电机霍尔信号计算得到各驱动轮实际转速;所述电子差速控制器包括Ackerman转向模型计算模块和PID神经元网络控制模块。本发明系统结构简单,可根据车辆转向角和目标行驶速度对各轮毂电机进行合理的电子差速控制。

着陆器用差速自适应机构.pdf
本发明提供了一种着陆器用差速自适应机构,包括主差速系统、两个副差速系统、基体、支脚结构和竖直向设置的主齿条和副齿条;所述主差速系统至少包括两个同步传动的主齿轮,两个所述主齿轮同步传动,每个所述副差速系统均至少包括两个副齿轮,每个所述副差速系统中的两个副齿轮同步传动;每个所述主齿条与一个所述副差速系统的位置固定,每个所述主齿条与一个所述主齿轮啮合,进而随着所述主齿轮的旋转实现竖直向移动;每个所述副齿条的下端均连接一个所述支脚结构,且与一个所述副齿轮啮合,进而随着所述副齿轮的旋转实现竖直向移动。