
血管介入手术机器人主手力反馈装置.pdf

盼易****君a

1/8
2/8

3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
血管介入手术机器人主手力反馈装置.pdf
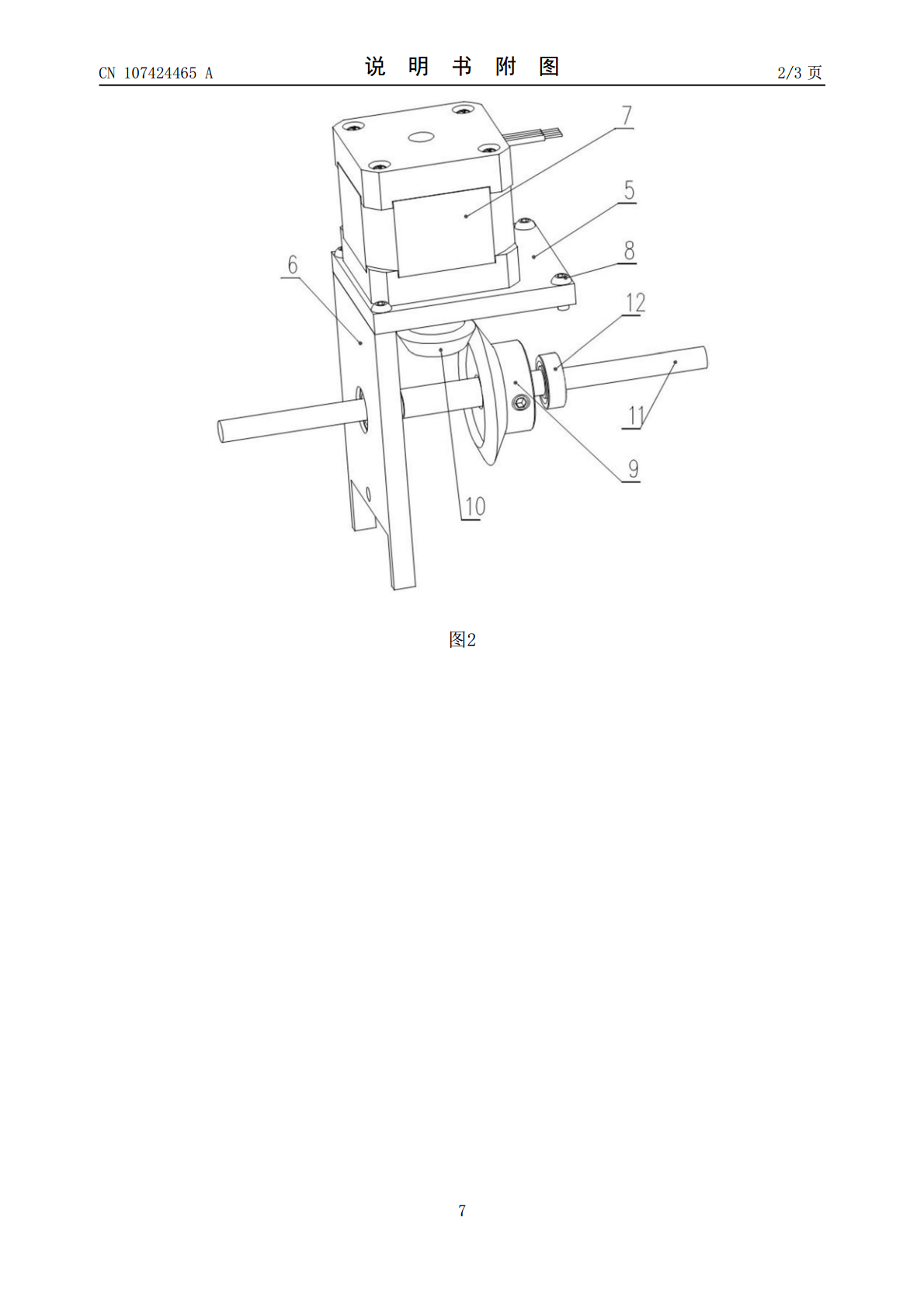
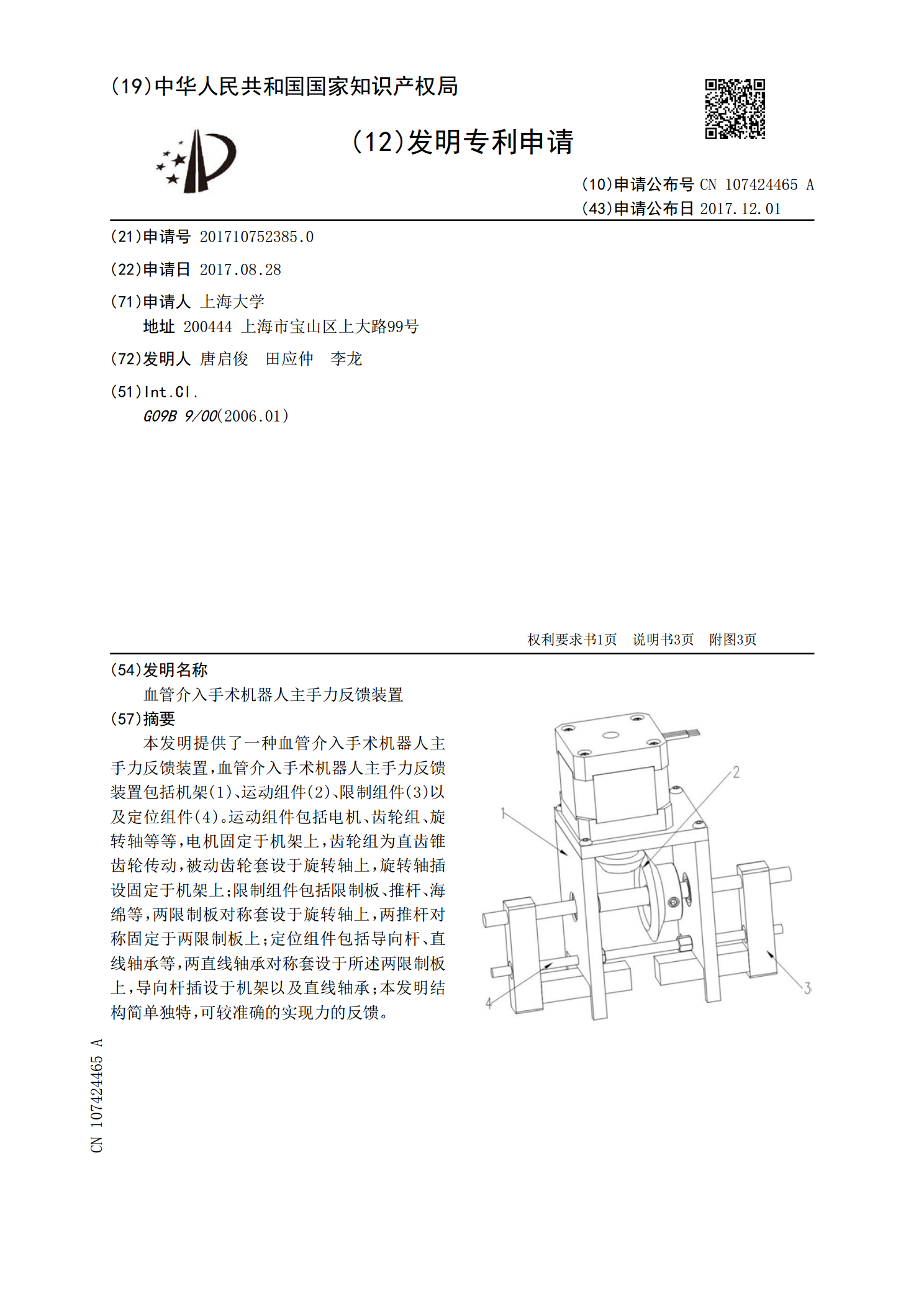
本发明提供了一种血管介入手术机器人主手力反馈装置,血管介入手术机器人主手力反馈装置包括机架(1)、运动组件(2)、限制组件(3)以及定位组件(4)。运动组件包括电机、齿轮组、旋转轴等等,电机固定于机架上,齿轮组为直齿锥齿轮传动,被动齿轮套设于旋转轴上,旋转轴插设固定于机架上;限制组件包括限制板、推杆、海绵等,两限制板对称套设于旋转轴上,两推杆对称固定于两限制板上;定位组件包括导向杆、直线轴承等,两直线轴承对称套设于所述两限制板上,导向杆插设于机架以及直线轴承;本发明结构简单独特,可较准确的实现力的反馈。

血管介入手术机器人.pdf
Proceedingsofthe2011IEEEInternationalConferenceonMechatronicsandAutomationAugust7-10,Beijing,ChinaDesignofaNovelMaster-SlaveRoboticSystemforMinimallyIntravascularInvasiveSurgeryPengZhang1,2*,ShichaoYu1,3,YingHu1,2,XinMa1,2,JianweiZhang41ShenzhenInstitutes

微创血管介入手术机器人导管推拉装置.pdf
本发明公开了一种微创血管介入手术机器人导管推拉装置,属于医疗设备领域。它用作微创血管介入手术机器人的末端执行器,包括移动部件和张合部件,移动部件包括移动动力部和移动执行部,移动动力来自直流伺服电机,通过齿轮传递动力到绳轮,绳拉动执行部移动。张合部件包括张合动力部和张合执行部,动力来自双向旋转电磁铁,通过齿轮进行动力传递,完成张合动作,移动部件和张合部件配合动作,完成移动部件推送导管、自身空返、自身空进、拉回导管四个动作。张合部件闭合时,移动部件向前移动,推送导管前进,向后移动,拉回导管;张合部件张开时,移

血管介入手术机器人导丝、导管操控装置.pdf
一种血管介入手术机器人导丝、导管操控装置,包括推送机构、旋捻机构以及控制系统,推送机构包括精调机构及粗调机构,粗调机构包括间隔的两导向管支架、设于两导向管支架之间的同步带轮传动机构以及由同步带轮传动机构带动的第一夹紧装置,精调机构包括固定支架、设于该导向管支架与固定支架之间的移动支架、固定于固定支架上且可带动移动支架相对固定支架往、返运动的丝杆螺母组件以及设于移动支架上的第二夹紧装置,旋捻机构包括设于移动支架上且与第二夹紧装置固定连接以带动第二夹紧装置旋转的齿轮传动机构。本发明中,提高了导丝、导管推送的效
一种介入手术机器人主端控制装置.pdf
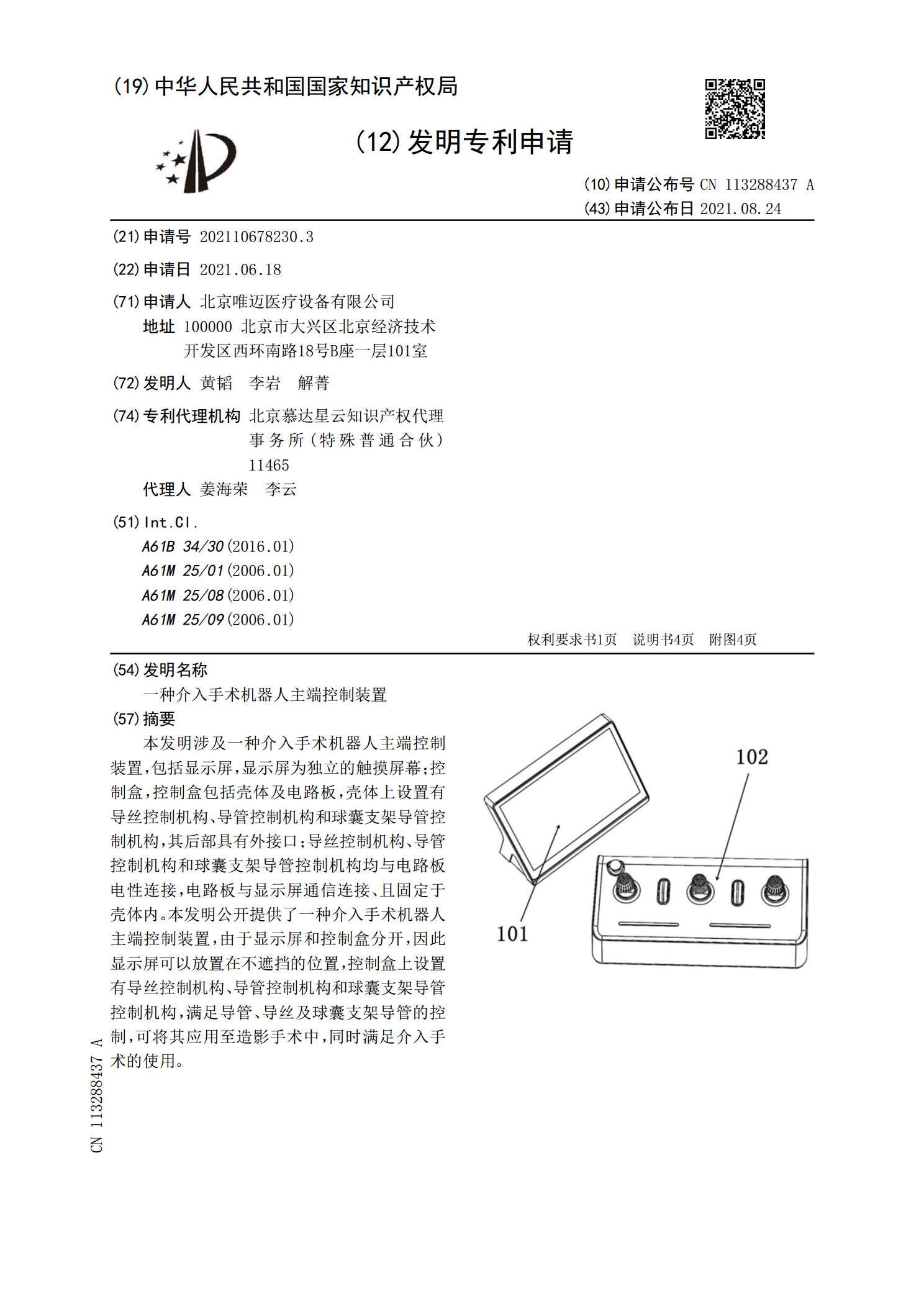
本发明涉及一种介入手术机器人主端控制装置,包括显示屏,显示屏为独立的触摸屏幕;控制盒,控制盒包括壳体及电路板,壳体上设置有导丝控制机构、导管控制机构和球囊支架导管控制机构,其后部具有外接口;导丝控制机构、导管控制机构和球囊支架导管控制机构均与电路板电性连接,电路板与显示屏通信连接、且固定于壳体内。本发明公开提供了一种介入手术机器人主端控制装置,由于显示屏和控制盒分开,因此显示屏可以放置在不遮挡的位置,控制盒上设置有导丝控制机构、导管控制机构和球囊支架导管控制机构,满足导管、导丝及球囊支架导管的控制,可将其