
血管介入手术机器人导丝、导管操控装置.pdf

Th****s3


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

血管介入手术机器人导丝、导管操控装置.pdf
一种血管介入手术机器人导丝、导管操控装置,包括推送机构、旋捻机构以及控制系统,推送机构包括精调机构及粗调机构,粗调机构包括间隔的两导向管支架、设于两导向管支架之间的同步带轮传动机构以及由同步带轮传动机构带动的第一夹紧装置,精调机构包括固定支架、设于该导向管支架与固定支架之间的移动支架、固定于固定支架上且可带动移动支架相对固定支架往、返运动的丝杆螺母组件以及设于移动支架上的第二夹紧装置,旋捻机构包括设于移动支架上且与第二夹紧装置固定连接以带动第二夹紧装置旋转的齿轮传动机构。本发明中,提高了导丝、导管推送的效
血管介入手术导丝导管操作装置.pdf
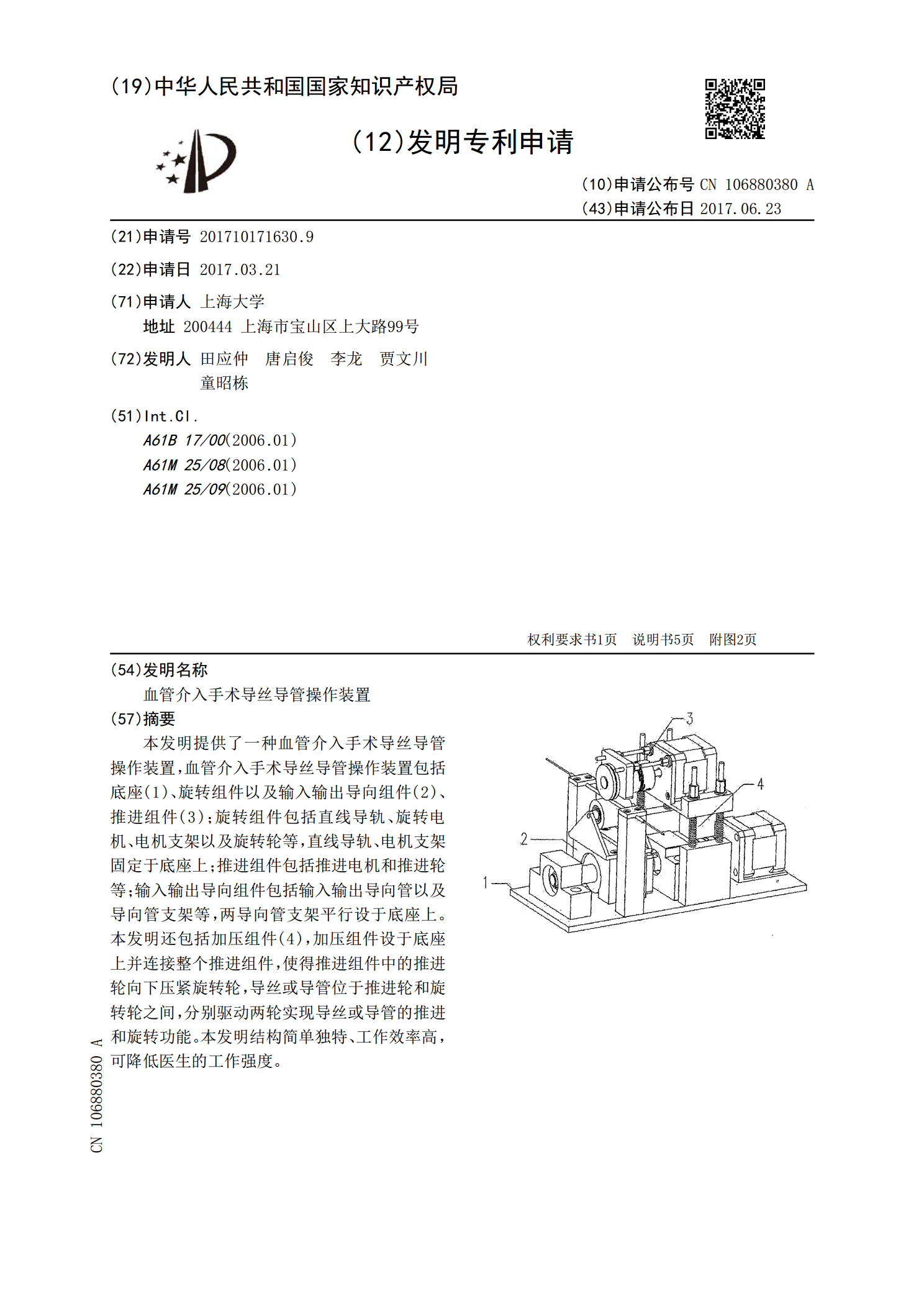
本发明提供了一种血管介入手术导丝导管操作装置,血管介入手术导丝导管操作装置包括底座(1)、旋转组件以及输入输出导向组件(2)、推进组件(3);旋转组件包括直线导轨、旋转电机、电机支架以及旋转轮等,直线导轨、电机支架固定于底座上;推进组件包括推进电机和推进轮等;输入输出导向组件包括输入输出导向管以及导向管支架等,两导向管支架平行设于底座上。本发明还包括加压组件(4),加压组件设于底座上并连接整个推进组件,使得推进组件中的推进轮向下压紧旋转轮,导丝或导管位于推进轮和旋转轮之间,分别驱动两轮实现导丝或导管的推进
血管介入手术导丝/导管递送装置.pdf
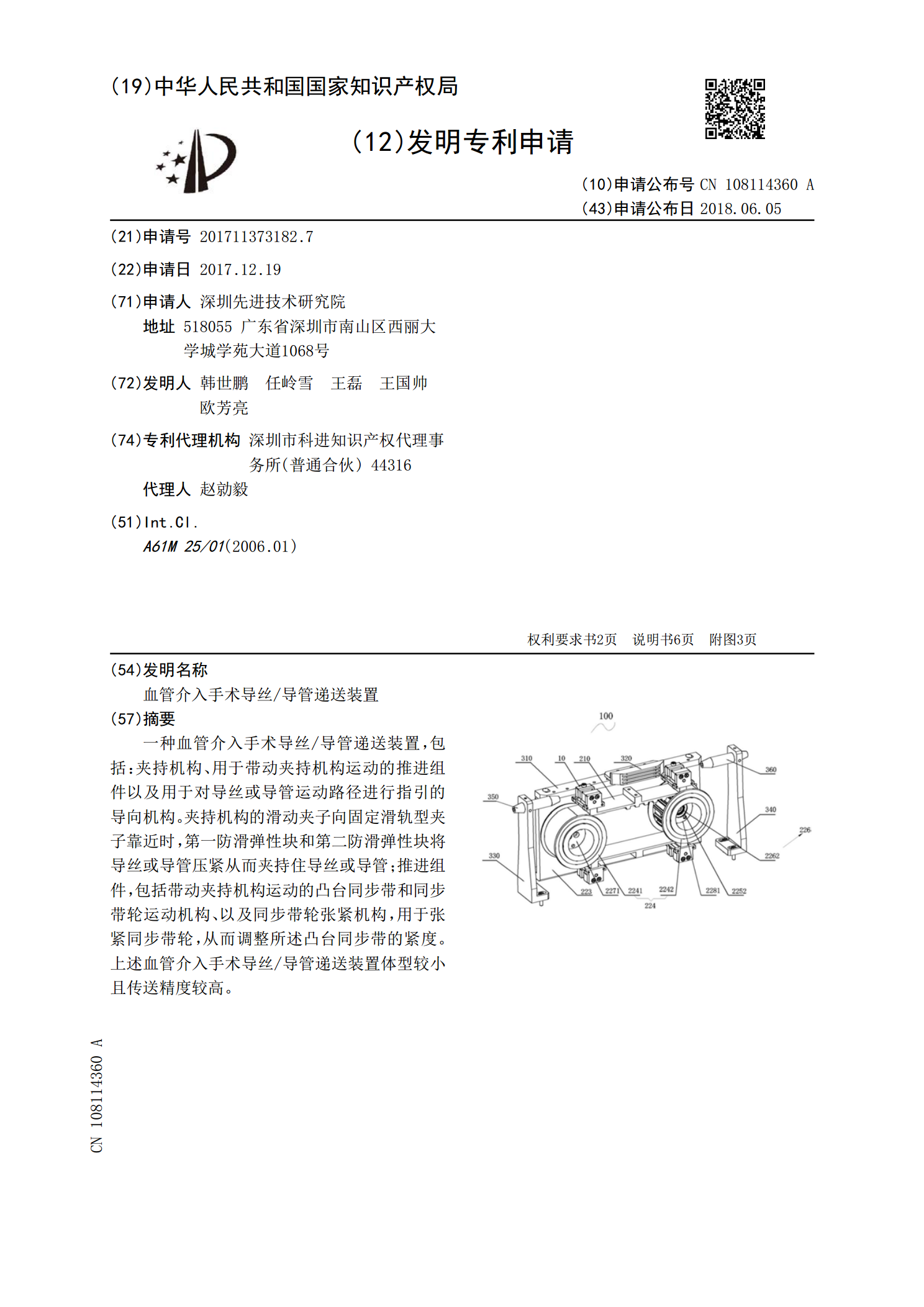
一种血管介入手术导丝/导管递送装置,包括:夹持机构、用于带动夹持机构运动的推进组件以及用于对导丝或导管运动路径进行指引的导向机构。夹持机构的滑动夹子向固定滑轨型夹子靠近时,第一防滑弹性块和第二防滑弹性块将导丝或导管压紧从而夹持住导丝或导管;推进组件,包括带动夹持机构运动的凸台同步带和同步带轮运动机构、以及同步带轮张紧机构,用于张紧同步带轮,从而调整所述凸台同步带的紧度。上述血管介入手术导丝/导管递送装置体型较小且传送精度较高。

介入手术机器人导管导丝推进装置.pdf
本发明涉及介入手术机器人导管导丝推进装置,包括壳体,其底部具有敞口,在其内部形成安装空间,其顶部与无菌盒磁性连接;导丝驱动机构、导管驱动机构及检测机构均连接于安装空间内,且均与控制器电性连接;其中检测机构的检测杆可伸出于壳体顶部,无菌盒的上盖开启和关闭状态改变检测杆的伸出量;控制器根据检测杆的伸出量信号控制导丝驱动机构带动无菌盒内的导丝驱动组件推进和旋转导丝,及导管驱动机构带动导管驱动组件推进导管。控制器控制导丝驱动机构、导管驱动机构推动导丝和导管进入患者体内指定位置,达到导管和导丝可同时控制的目的;防止

血管腔内介入手术机器人导丝/导管操作扭矩检测装置.pdf
本发明公开了一种血管腔内介入手术机器人导丝/导管操作扭矩检测装置,属于医疗装备制造技术领域,所述扭矩检测装置上设有的用于实现导丝/导管扭转操作的传动齿轮,传动齿轮的内圆周面上固定连接有弹簧圈;所述弹簧圈由同心的外圈和内圈通过四个弹簧片连接组成,四个弹簧片沿弹簧圈周向均匀分布,形成十字形结构,四个电阻应变片分别固定在四个弹簧片上,且四个电阻应变片连接为全桥电路,所述全桥电路通过导电滑环与外部的输出信号电路连接;该装置能够实现从端导丝或导管操作扭矩的在线检测,便于医生感知导管导丝的扭转阻力,进而感知从端手术的