
微创血管介入手术机器人导管推拉装置.pdf

斌斌****公主


1/9

2/9

3/9

4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

微创血管介入手术机器人导管推拉装置.pdf
本发明公开了一种微创血管介入手术机器人导管推拉装置,属于医疗设备领域。它用作微创血管介入手术机器人的末端执行器,包括移动部件和张合部件,移动部件包括移动动力部和移动执行部,移动动力来自直流伺服电机,通过齿轮传递动力到绳轮,绳拉动执行部移动。张合部件包括张合动力部和张合执行部,动力来自双向旋转电磁铁,通过齿轮进行动力传递,完成张合动作,移动部件和张合部件配合动作,完成移动部件推送导管、自身空返、自身空进、拉回导管四个动作。张合部件闭合时,移动部件向前移动,推送导管前进,向后移动,拉回导管;张合部件张开时,移
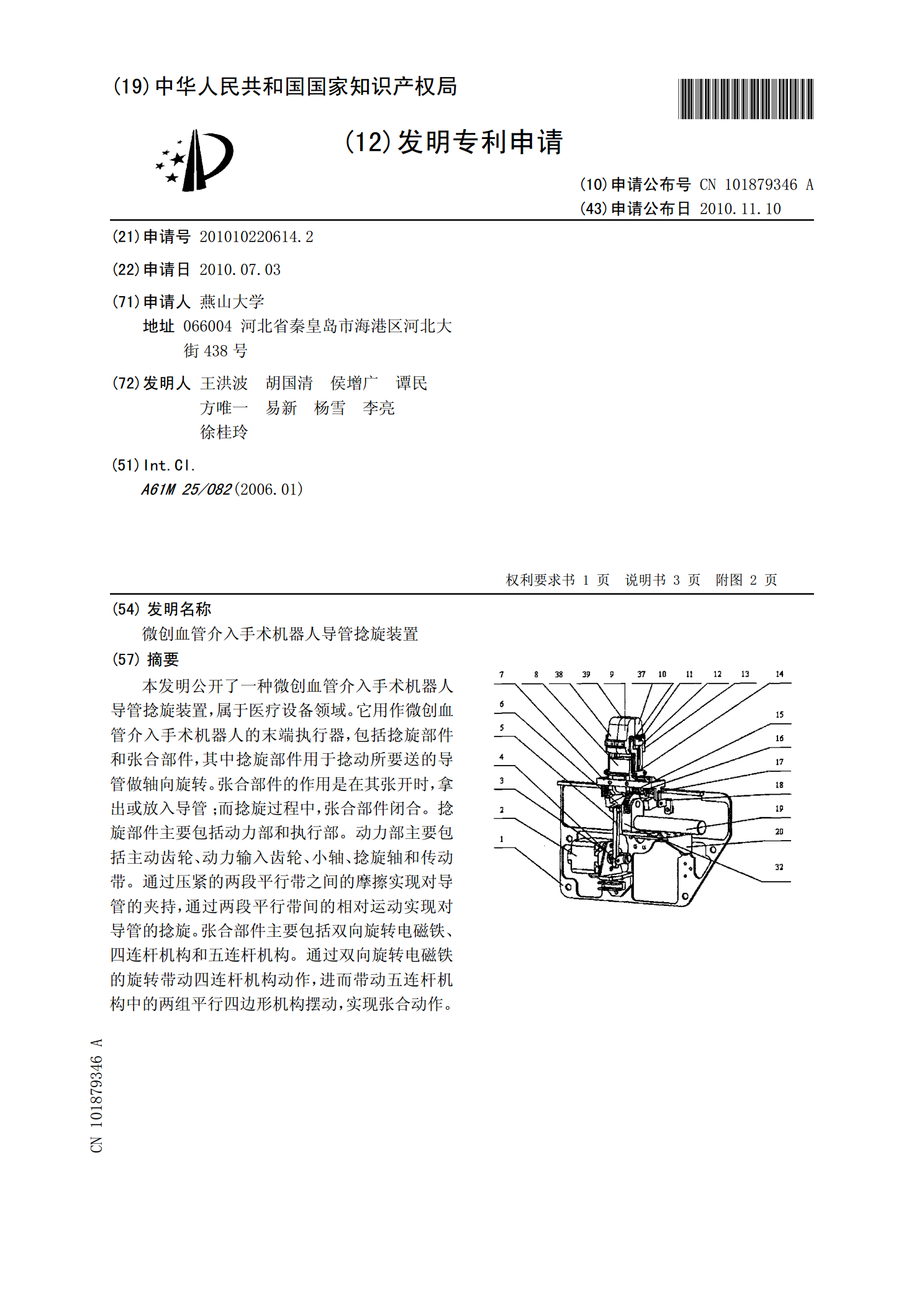
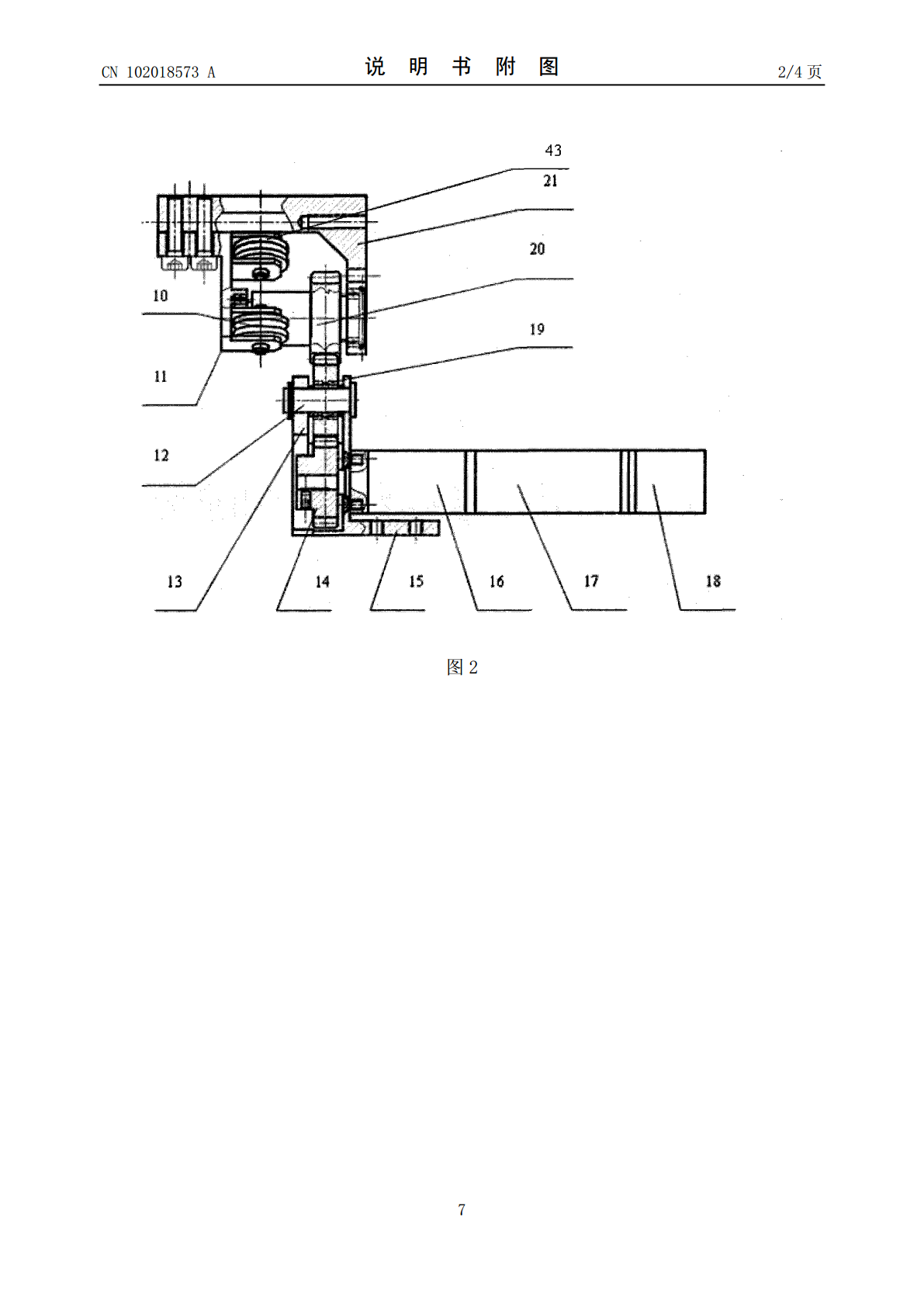
微创血管介入手术机器人导管捻旋装置.pdf
本发明公开了一种微创血管介入手术机器人导管捻旋装置,属于医疗设备领域。它用作微创血管介入手术机器人的末端执行器,包括捻旋部件和张合部件,其中捻旋部件用于捻动所要送的导管做轴向旋转。张合部件的作用是在其张开时,拿出或放入导管;而捻旋过程中,张合部件闭合。捻旋部件主要包括动力部和执行部。动力部主要包括主动齿轮、动力输入齿轮、小轴、捻旋轴和传动带。通过压紧的两段平行带之间的摩擦实现对导管的夹持,通过两段平行带间的相对运动实现对导管的捻旋。张合部件主要包括双向旋转电磁铁、四连杆机构和五连杆机构。通过双向旋转电磁铁
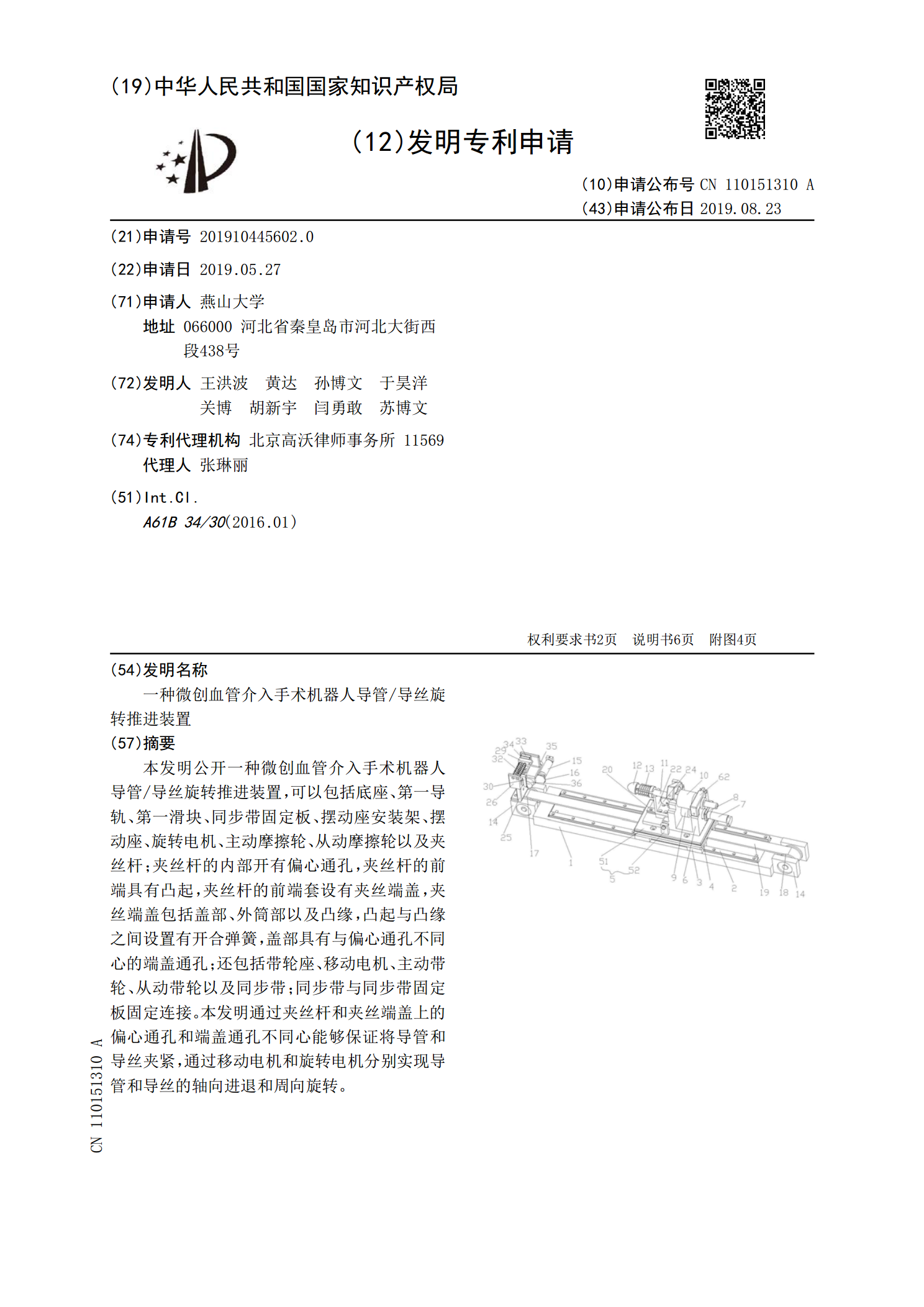
一种微创血管介入手术机器人导管/导丝旋转推进装置.pdf
本发明公开一种微创血管介入手术机器人导管/导丝旋转推进装置,可以包括底座、第一导轨、第一滑块、同步带固定板、摆动座安装架、摆动座、旋转电机、主动摩擦轮、从动摩擦轮以及夹丝杆;夹丝杆的内部开有偏心通孔,夹丝杆的前端具有凸起,夹丝杆的前端套设有夹丝端盖,夹丝端盖包括盖部、外筒部以及凸缘,凸起与凸缘之间设置有开合弹簧,盖部具有与偏心通孔不同心的端盖通孔;还包括带轮座、移动电机、主动带轮、从动带轮以及同步带;同步带与同步带固定板固定连接。本发明通过夹丝杆和夹丝端盖上的偏心通孔和端盖通孔不同心能够保证将导管和导丝夹
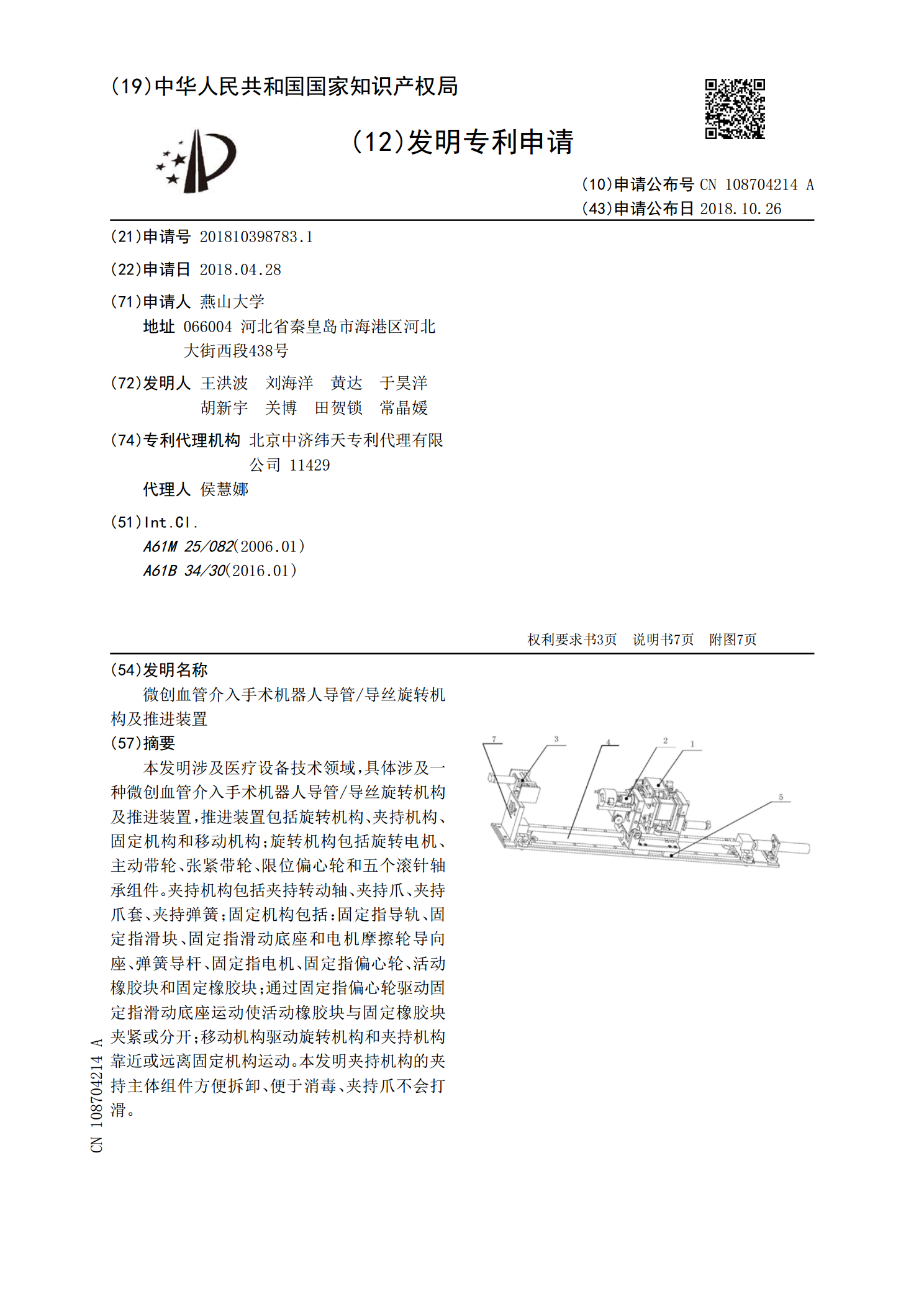
微创血管介入手术机器人导管/导丝旋转机构及推进装置.pdf
本发明涉及医疗设备技术领域,具体涉及一种微创血管介入手术机器人导管/导丝旋转机构及推进装置,推进装置包括旋转机构、夹持机构、固定机构和移动机构;旋转机构包括旋转电机、主动带轮、张紧带轮、限位偏心轮和五个滚针轴承组件。夹持机构包括夹持转动轴、夹持爪、夹持爪套、夹持弹簧;固定机构包括:固定指导轨、固定指滑块、固定指滑动底座和电机摩擦轮导向座、弹簧导杆、固定指电机、固定指偏心轮、活动橡胶块和固定橡胶块;通过固定指偏心轮驱动固定指滑动底座运动使活动橡胶块与固定橡胶块夹紧或分开;移动机构驱动旋转机构和夹持机构靠近或

血管介入手术机器人导丝、导管操控装置.pdf
一种血管介入手术机器人导丝、导管操控装置,包括推送机构、旋捻机构以及控制系统,推送机构包括精调机构及粗调机构,粗调机构包括间隔的两导向管支架、设于两导向管支架之间的同步带轮传动机构以及由同步带轮传动机构带动的第一夹紧装置,精调机构包括固定支架、设于该导向管支架与固定支架之间的移动支架、固定于固定支架上且可带动移动支架相对固定支架往、返运动的丝杆螺母组件以及设于移动支架上的第二夹紧装置,旋捻机构包括设于移动支架上且与第二夹紧装置固定连接以带动第二夹紧装置旋转的齿轮传动机构。本发明中,提高了导丝、导管推送的效