
一种用于玻璃幕墙清洁系统的可换向的轮机构.pdf

森林****io

1/9
2/9
3/9
4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于玻璃幕墙清洁系统的可换向的轮机构.pdf
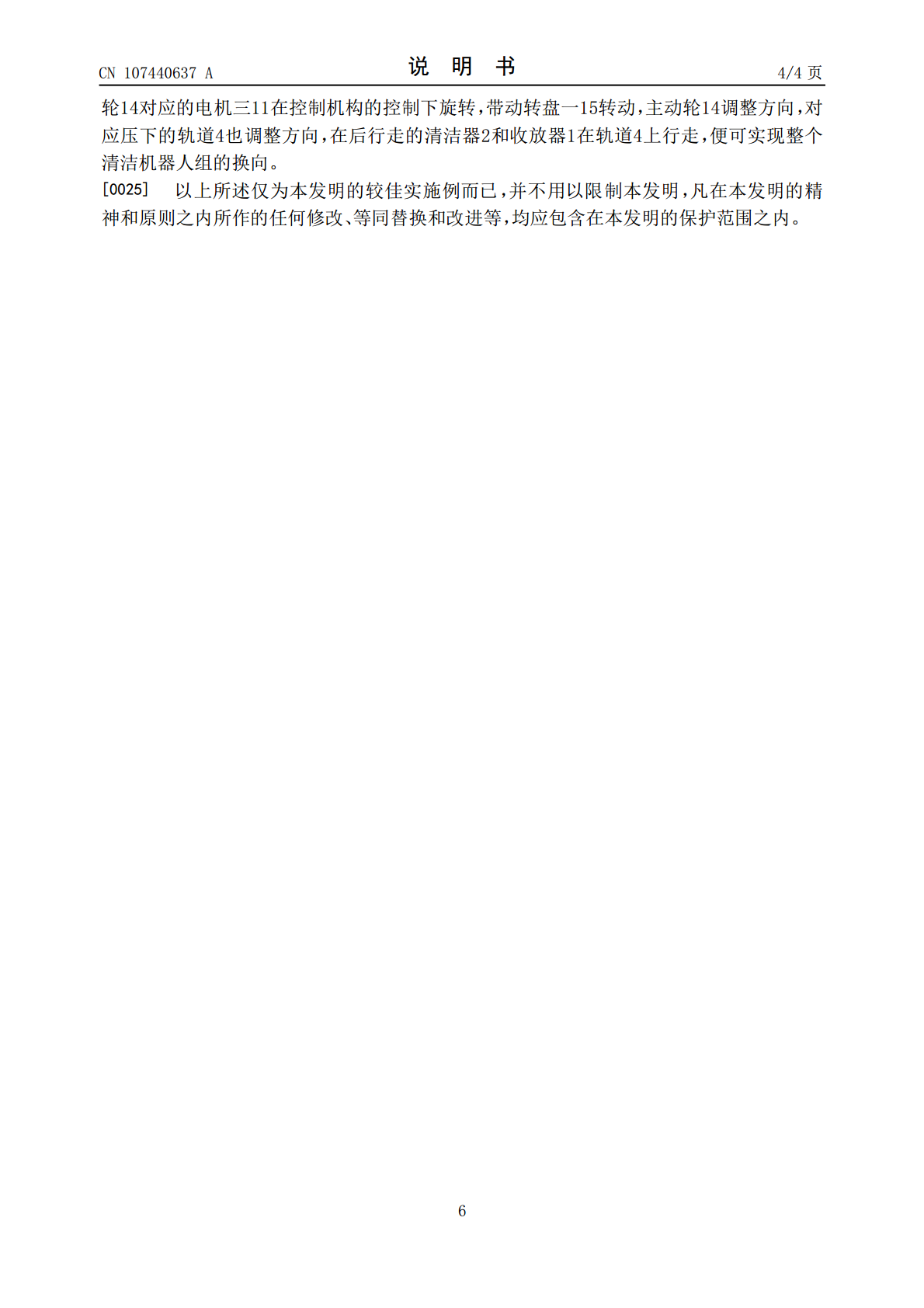
本发明涉及一种用于玻璃幕墙清洁系统的可换向的轮机构,包括轮组和伸缩机构一,伸缩机构一能带动轮组竖直移动;轮组包括主动轮和从动轮,伸缩机构一包括伸缩器一和伸缩器二,伸缩器一能带动主动轮竖直移动,伸缩器二能带动从动轮竖直移动。主动轮靠驱动机构一驱动旋转,驱动机构一包括电机四和转轴一,主动轮设有调整轮组方向的旋转机构,所述旋转机构包括电机三和转盘一,电机三安装在伸缩机构上,电机三的输出端连接转盘一,电机四安装在转盘一上,主动轮和电机四的输出端相连。主动轮的方向可以调节,实现了清洁机器人组方向可以灵活调节,清洁机
一种用于玻璃幕墙清洁系统的可换向的清洁器.pdf
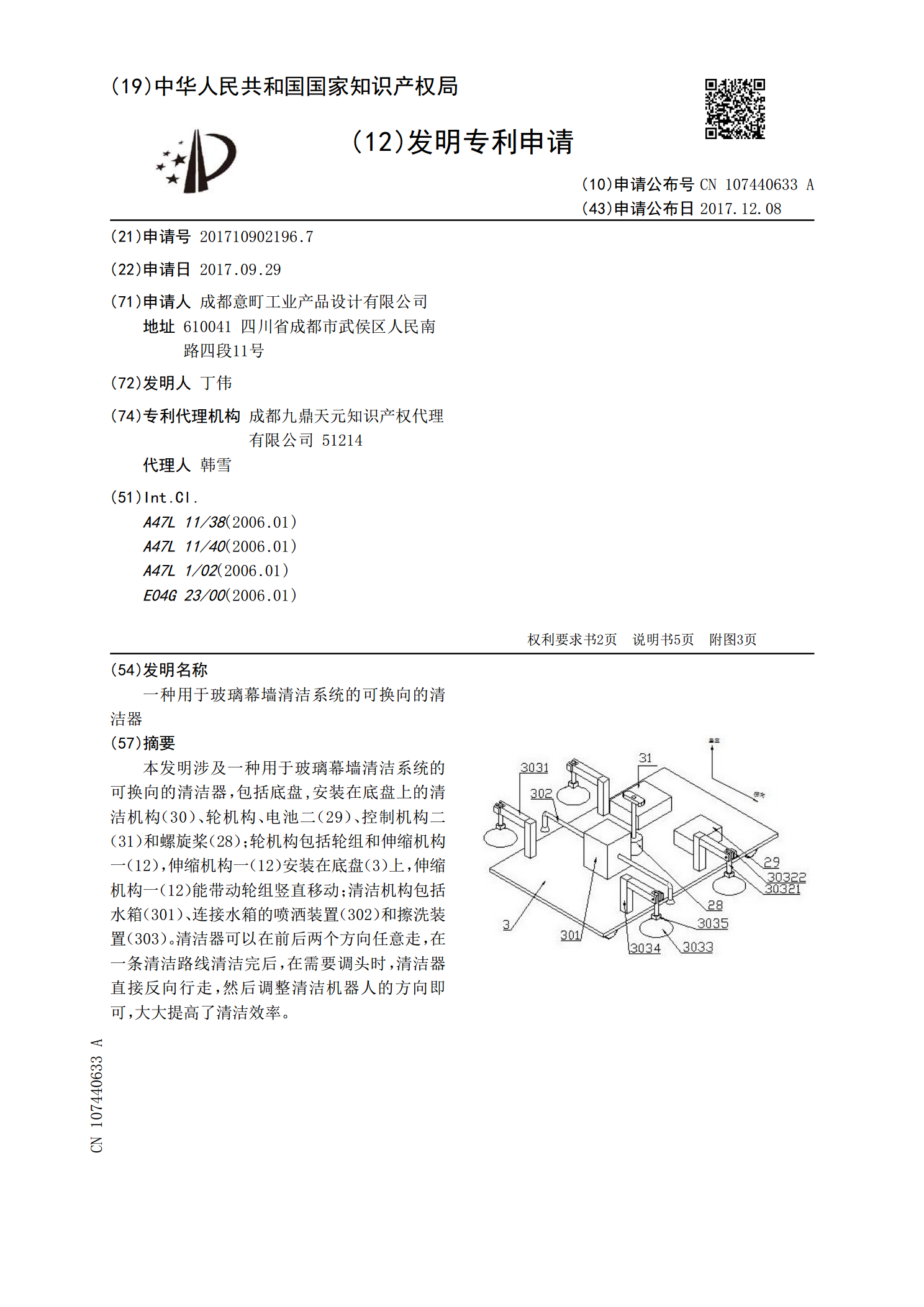
本发明涉及一种用于玻璃幕墙清洁系统的可换向的清洁器,包括底盘,安装在底盘上的清洁机构(30)、轮机构、电池二(29)、控制机构二(31)和螺旋桨(28);轮机构包括轮组和伸缩机构一(12),伸缩机构一(12)安装在底盘(3)上,伸缩机构一(12)能带动轮组竖直移动;清洁机构包括水箱(301)、连接水箱的喷洒装置(302)和擦洗装置(303)。清洁器可以在前后两个方向任意走,在一条清洁路线清洁完后,在需要调头时,清洁器直接反向行走,然后调整清洁机器人的方向即可,大大提高了清洁效率。
一种用于玻璃幕墙清洁系统的轮机构.pdf
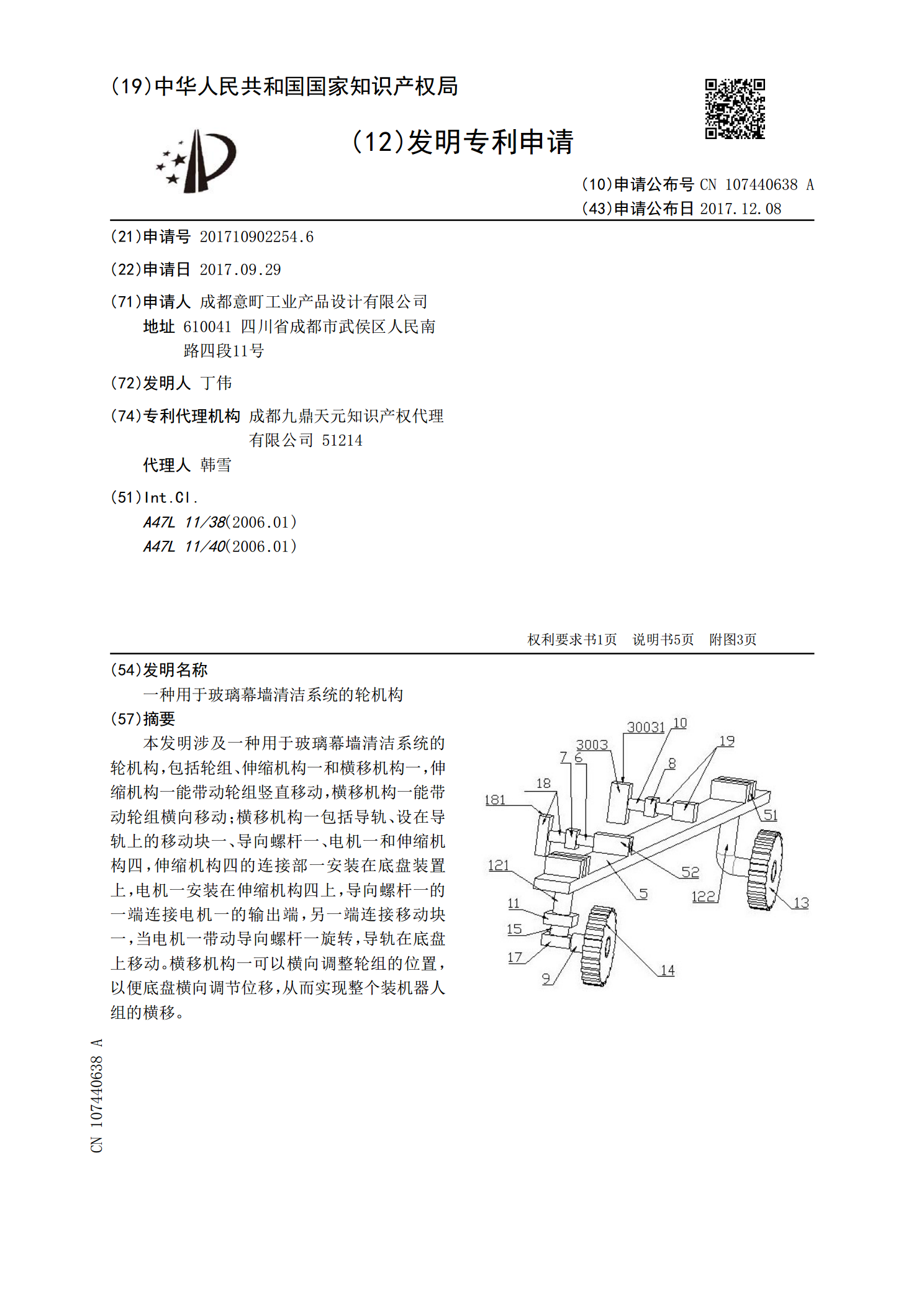
本发明涉及一种用于玻璃幕墙清洁系统的轮机构,包括轮组、伸缩机构一和横移机构一,伸缩机构一能带动轮组竖直移动,横移机构一能带动轮组横向移动;横移机构一包括导轨、设在导轨上的移动块一、导向螺杆一、电机一和伸缩机构四,伸缩机构四的连接部一安装在底盘装置上,电机一安装在伸缩机构四上,导向螺杆一的一端连接电机一的输出端,另一端连接移动块一,当电机一带动导向螺杆一旋转,导轨在底盘上移动。横移机构一可以横向调整轮组的位置,以便底盘横向调节位移,从而实现整个装机器人组的横移。
一种用于玻璃幕墙清洁系统的轨道.pdf
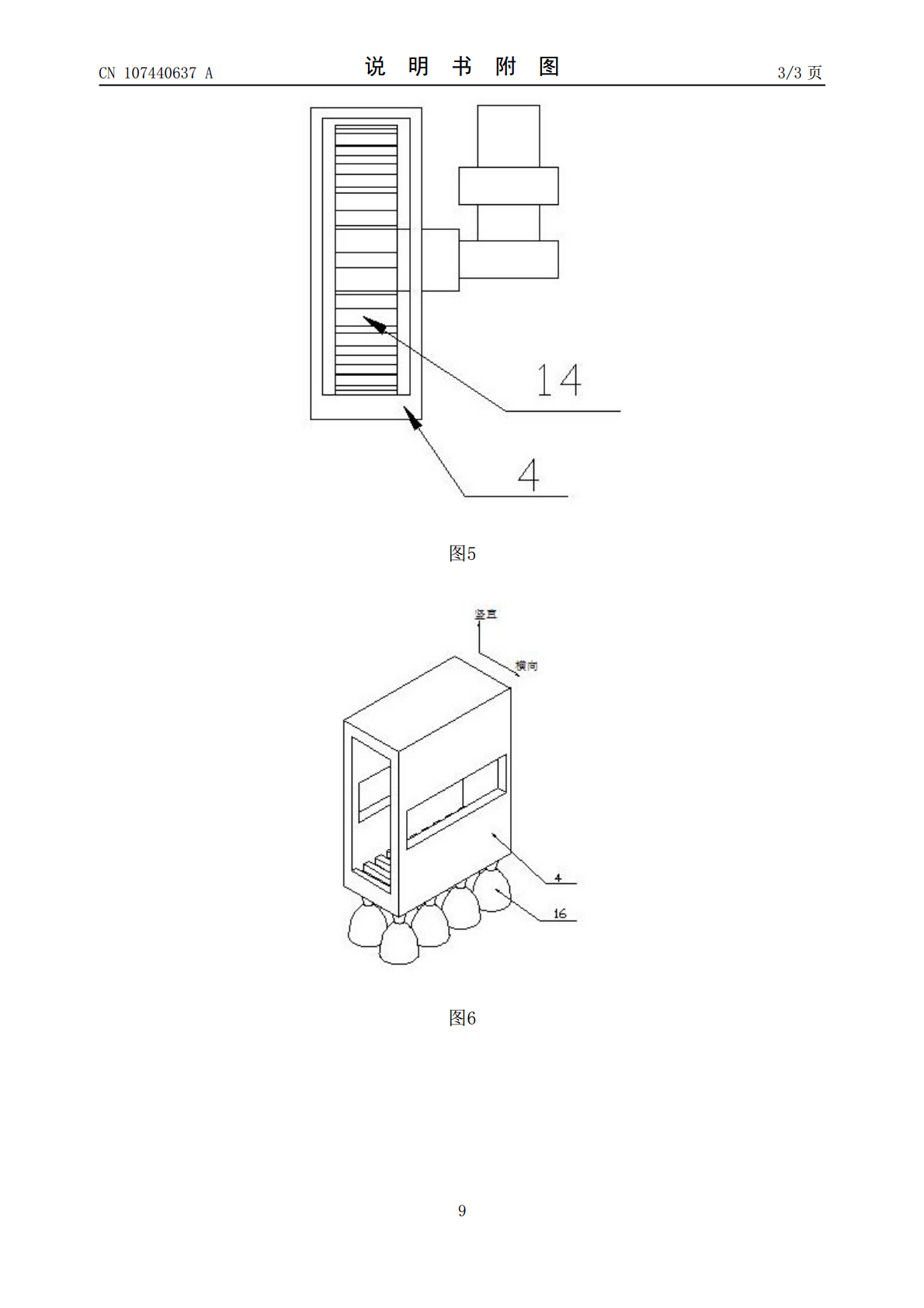
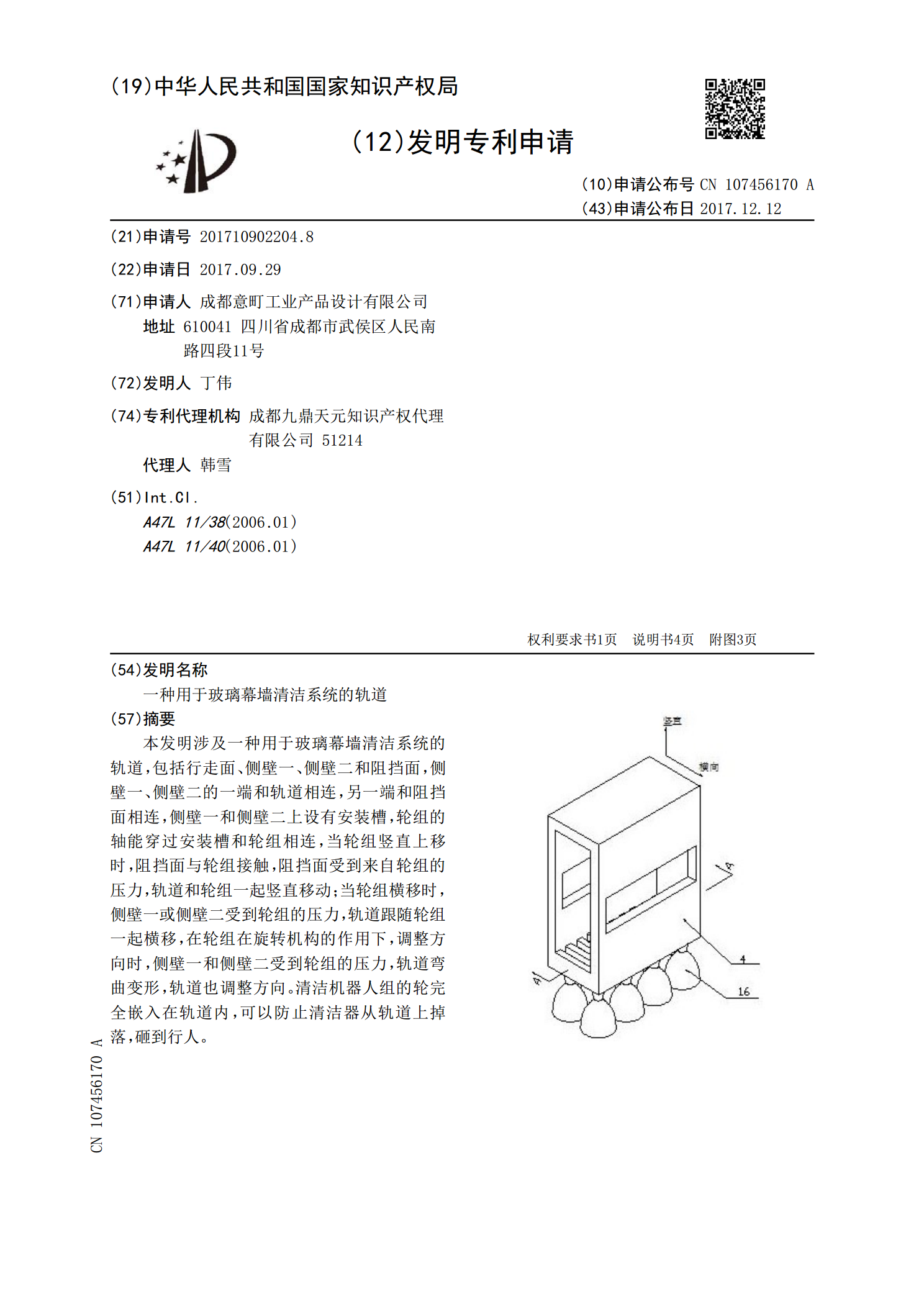
本发明涉及一种用于玻璃幕墙清洁系统的轨道,包括行走面、侧壁一、侧壁二和阻挡面,侧壁一、侧壁二的一端和轨道相连,另一端和阻挡面相连,侧壁一和侧壁二上设有安装槽,轮组的轴能穿过安装槽和轮组相连,当轮组竖直上移时,阻挡面与轮组接触,阻挡面受到来自轮组的压力,轨道和轮组一起竖直移动;当轮组横移时,侧壁一或侧壁二受到轮组的压力,轨道跟随轮组一起横移,在轮组在旋转机构的作用下,调整方向时,侧壁一和侧壁二受到轮组的压力,轨道弯曲变形,轨道也调整方向。清洁机器人组的轮完全嵌入在轨道内,可以防止清洁器从轨道上掉落,砸到行人
一种可换向的同轴转向机构.pdf
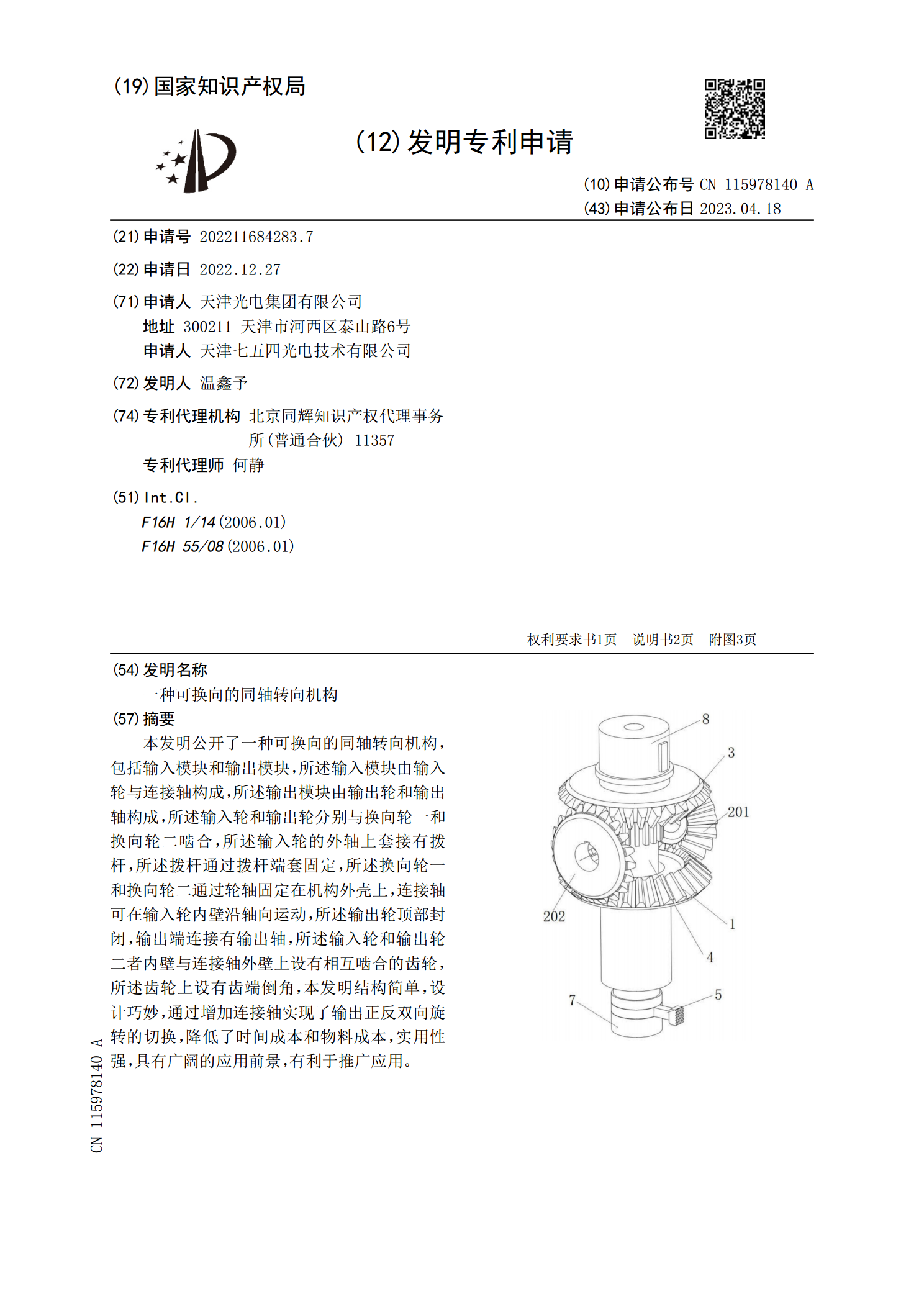
本发明公开了一种可换向的同轴转向机构,包括输入模块和输出模块,所述输入模块由输入轮与连接轴构成,所述输出模块由输出轮和输出轴构成,所述输入轮和输出轮分别与换向轮一和换向轮二啮合,所述输入轮的外轴上套接有拨杆,所述拨杆通过拨杆端套固定,所述换向轮一和换向轮二通过轮轴固定在机构外壳上,连接轴可在输入轮内壁沿轴向运动,所述输出轮顶部封闭,输出端连接有输出轴,所述输入轮和输出轮二者内壁与连接轴外壁上设有相互啮合的齿轮,所述齿轮上设有齿端倒角,本发明结构简单,设计巧妙,通过增加连接轴实现了输出正反双向旋转的切换,降