
曲柄轴组件、减速器及机器人.pdf

是你****优呀


1/9
2/9

3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

曲柄轴组件、减速器及机器人.pdf
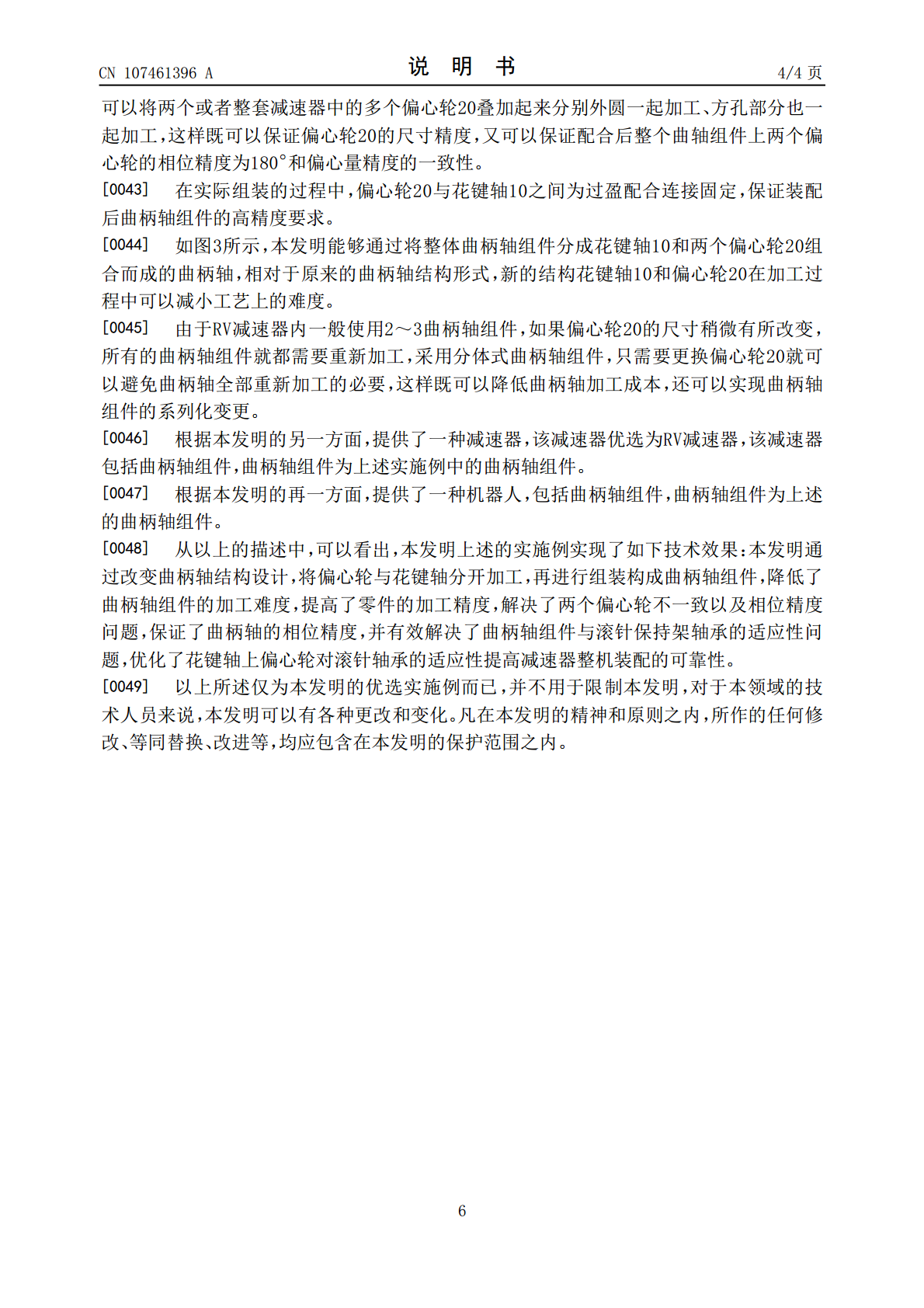
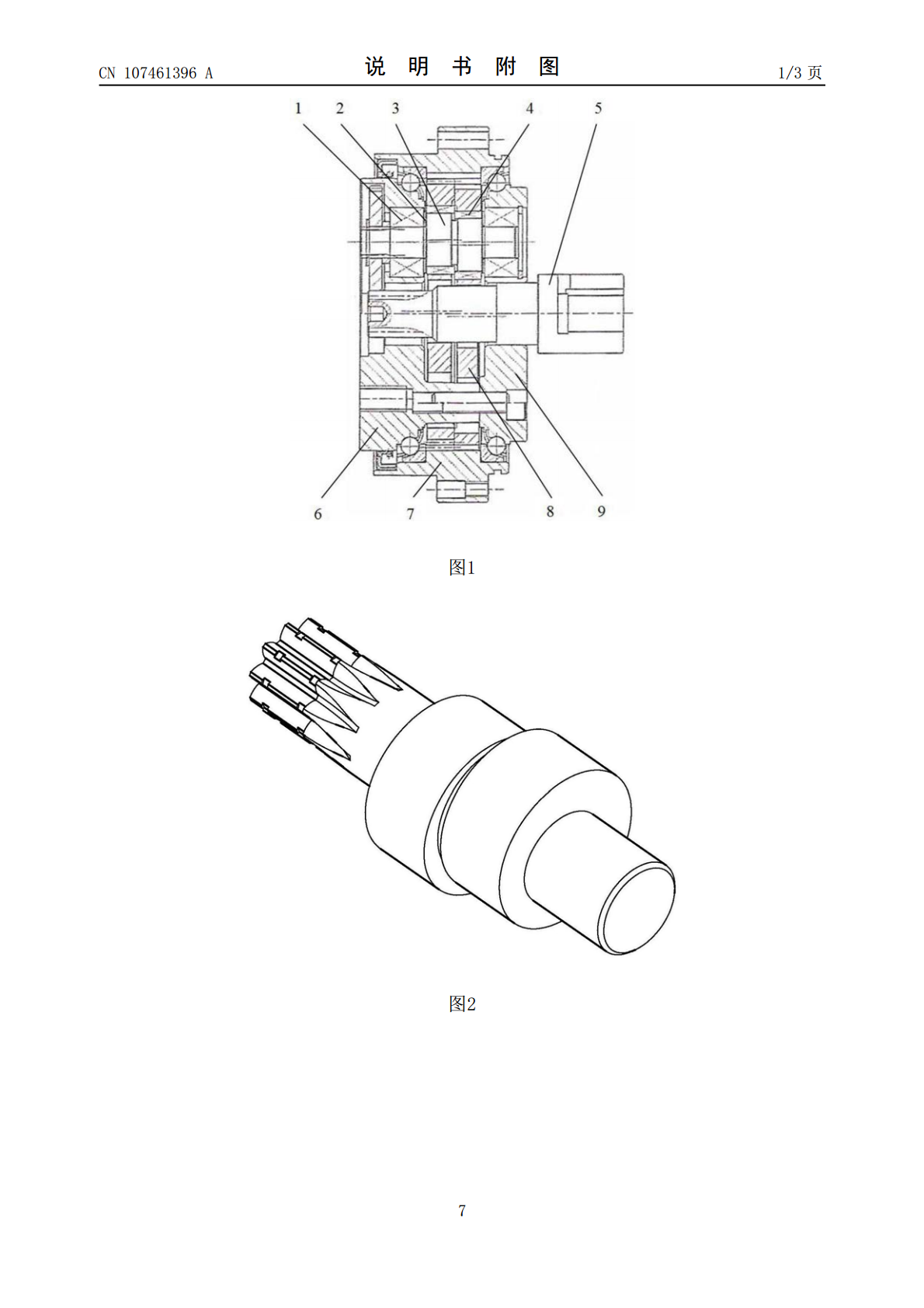
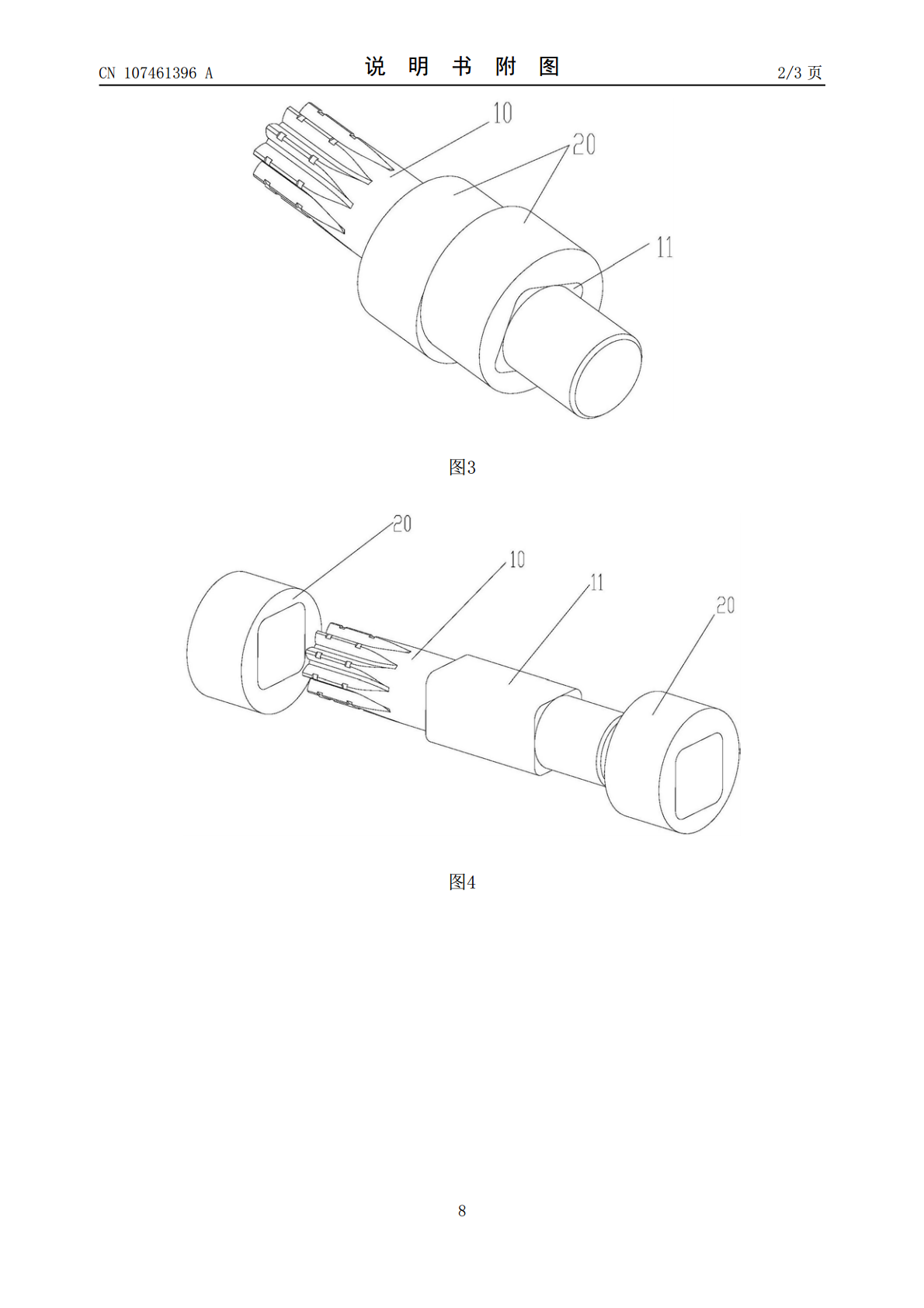
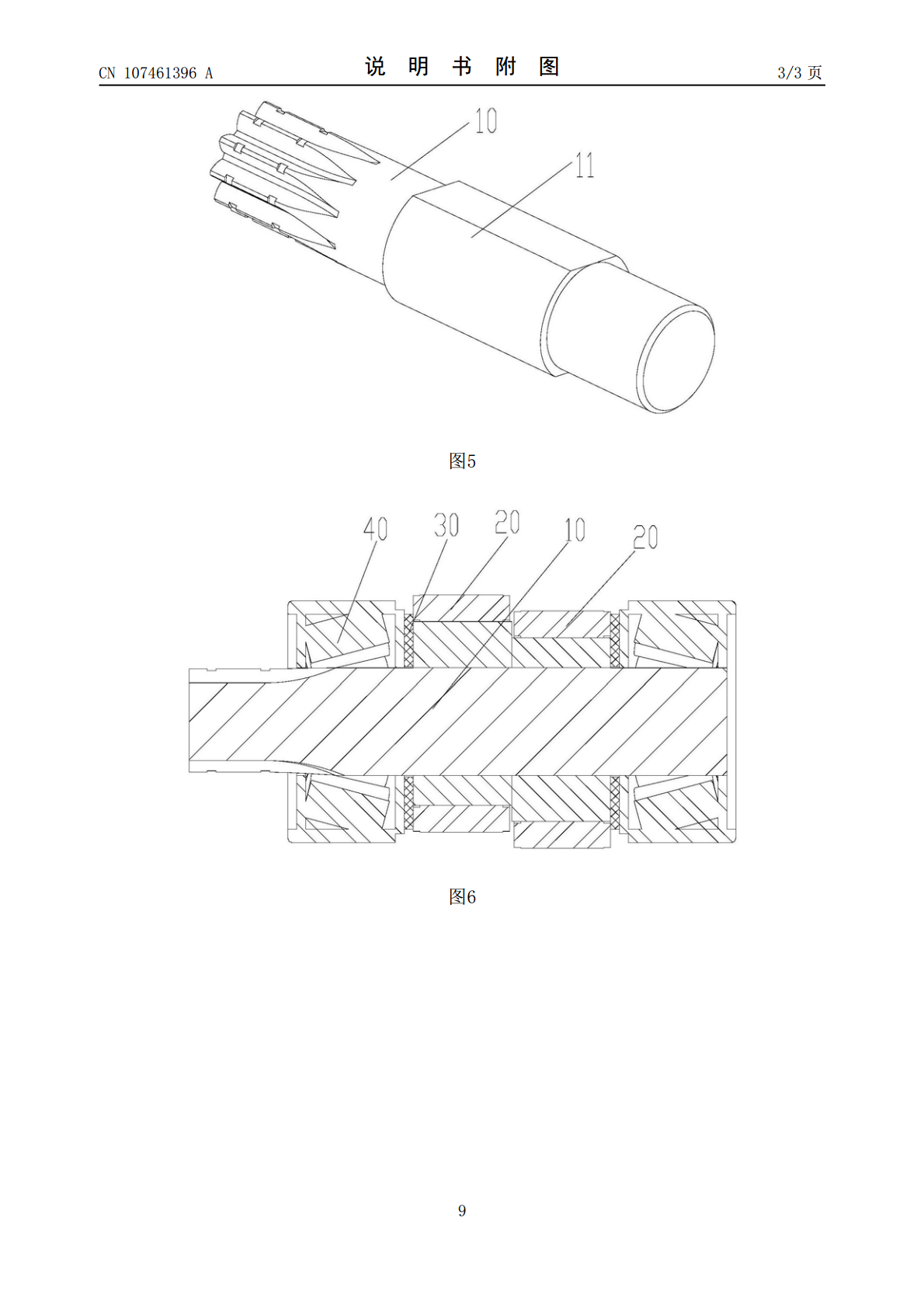
本发明提供了一种曲柄轴组件、减速器及机器人。曲柄轴组件包括花键轴和多个偏心轮,偏心轮与花键轴分别加工后组装为一体。由于本发明中的曲柄轴组件的花键轴和偏心轮是分别加工后组装为一体的,相对于现有技术中一体设置的结构而言,本发明中的曲柄轴组件的误差小,将花键轴和偏心轮分别加工完成之后,只需要将多个偏心轮按照预定的相位需求组装在花键轴上即可,能够满足偏心轮的绝对相位需求,简化了曲柄轴组件的加工工艺,降低了曲柄轴组件的加工难度,有效提高减速器的使用精度和使用寿命,提高了减速器整机的装配可靠性。

机器人RV减速器曲柄轴的加工方法.pdf
本发明公开了一种机器人RV减速器曲柄轴的加工方法,包括以下步骤:锻造曲柄轴坯;将曲柄轴坯进行冷挤压处理;在曲柄轴坯两端面上分别钻一中心定位孔,在两端部周面上分别加工出一个定位平面;以两中心定位孔为定位基准精加工两个偏心轮靠近锥度滚针轴承内道沟的端面,同时准精加工曲柄轴上每个锥度滚针轴承内道沟的两个端面;以两中心定位孔为定位基准精磨出曲柄轴坯的两端部和两个锥度滚针轴承的内道沟;以两中心定位孔为定位基准精磨两偏心轮的外周面;以两定位平面为定位基准,将曲柄轴进行精磨,使两个偏心轮的相位差为180度。本发明减小了
减速器曲柄轴及减速器.pdf
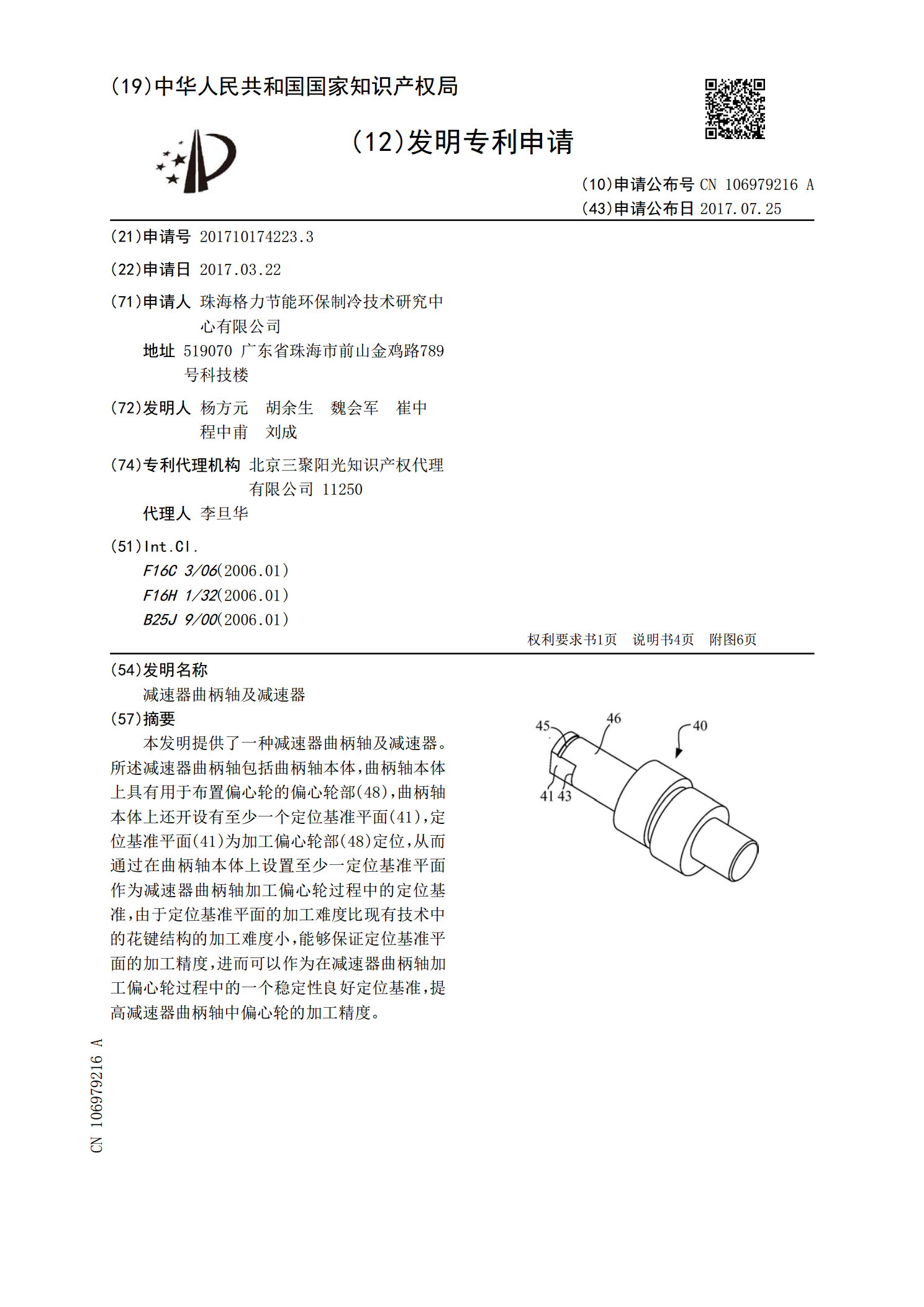
本发明提供了一种减速器曲柄轴及减速器。所述减速器曲柄轴包括曲柄轴本体,曲柄轴本体上具有用于布置偏心轮的偏心轮部(48),曲柄轴本体上还开设有至少一个定位基准平面(41),定位基准平面(41)为加工偏心轮部(48)定位,从而通过在曲柄轴本体上设置至少一定位基准平面作为减速器曲柄轴加工偏心轮过程中的定位基准,由于定位基准平面的加工难度比现有技术中的花键结构的加工难度小,能够保证定位基准平面的加工精度,进而可以作为在减速器曲柄轴加工偏心轮过程中的一个稳定性良好定位基准,提高减速器曲柄轴中偏心轮的加工精度。

一种曲柄轴及减速器.pdf
本发明提供了一种曲柄轴及减速器,涉及减速器技术领域。包括:依次连接的第一轴部、第一偏心部、第二偏心部、齿轮以及第二轴部,所述第一轴部、所述第二轴部和所述齿轮同轴设置,所述第一偏心部和所述第二偏心部相较于所述第一轴部偏心设置。齿轮直接设置在第二偏心部和第二轴部之间,也就是直接将行星齿轮集成在了曲柄轴上,而不需要通过花键连接。如此,省略了曲柄轴上外花键与行星齿轮上内花键的加工,简化了加工工艺,降低了加工成本。
一种RV减速器用可调心曲柄轴.pdf
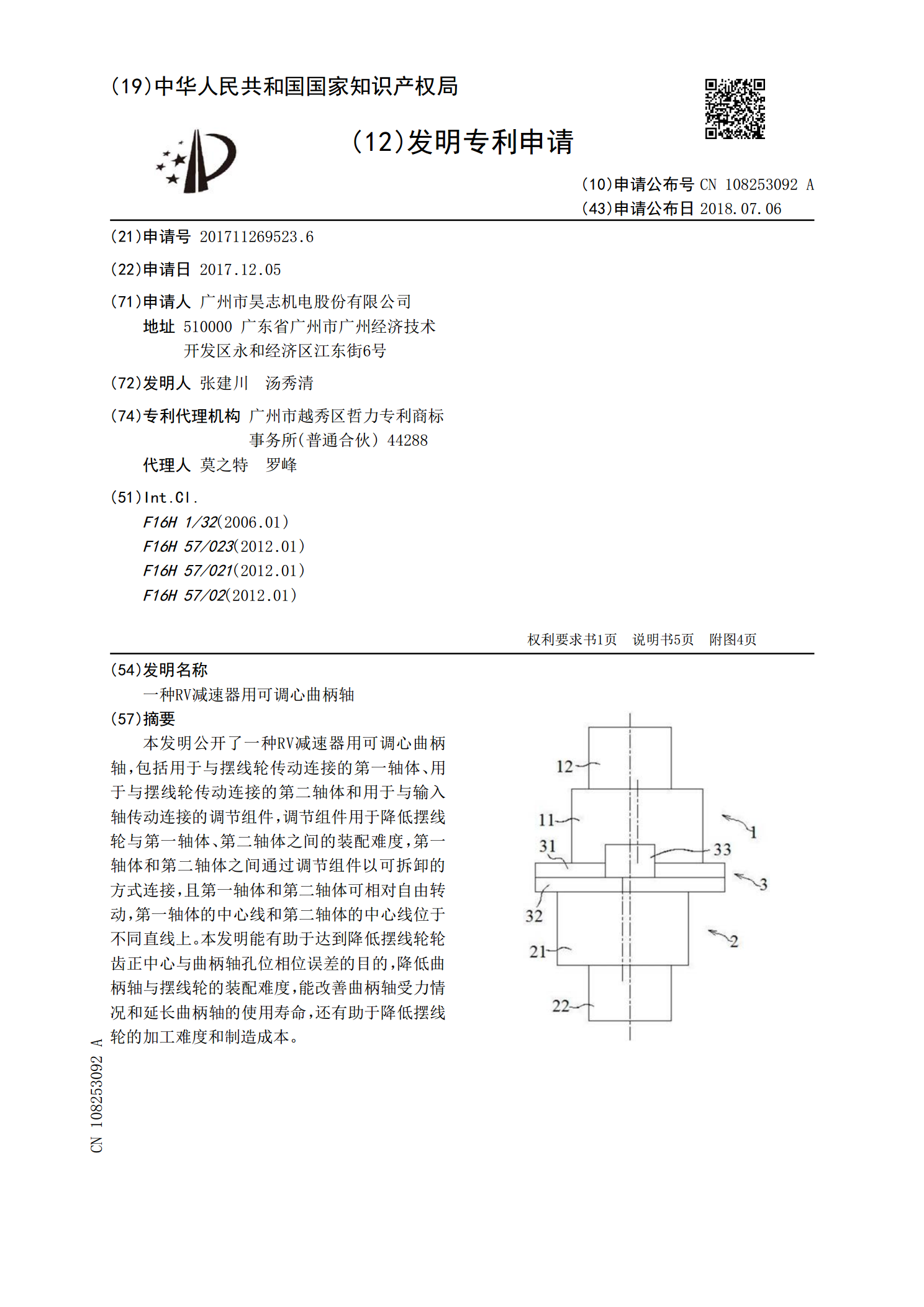
本发明公开了一种RV减速器用可调心曲柄轴,包括用于与摆线轮传动连接的第一轴体、用于与摆线轮传动连接的第二轴体和用于与输入轴传动连接的调节组件,调节组件用于降低摆线轮与第一轴体、第二轴体之间的装配难度,第一轴体和第二轴体之间通过调节组件以可拆卸的方式连接,且第一轴体和第二轴体可相对自由转动,第一轴体的中心线和第二轴体的中心线位于不同直线上。本发明能有助于达到降低摆线轮轮齿正中心与曲柄轴孔位相位误差的目的,降低曲柄轴与摆线轮的装配难度,能改善曲柄轴受力情况和延长曲柄轴的使用寿命,还有助于降低摆线轮的加工难度和