
一种轮履形态可重构移动救援机器人.pdf

一吃****成益

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮履形态可重构移动救援机器人.pdf
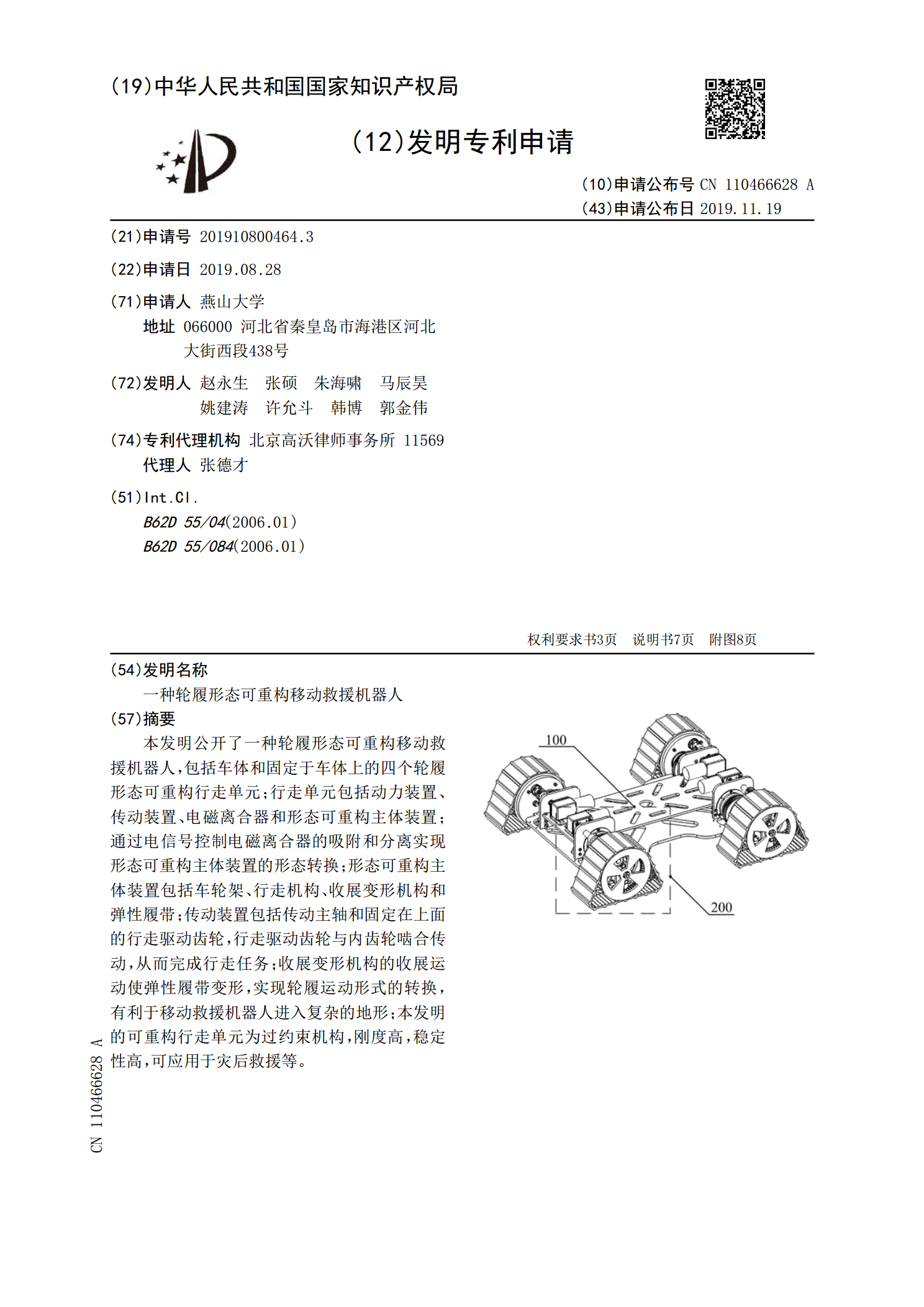
本发明公开了一种轮履形态可重构移动救援机器人,包括车体和固定于车体上的四个轮履形态可重构行走单元;行走单元包括动力装置、传动装置、电磁离合器和形态可重构主体装置;通过电信号控制电磁离合器的吸附和分离实现形态可重构主体装置的形态转换;形态可重构主体装置包括车轮架、行走机构、收展变形机构和弹性履带;传动装置包括传动主轴和固定在上面的行走驱动齿轮,行走驱动齿轮与内齿轮啮合传动,从而完成行走任务;收展变形机构的收展运动使弹性履带变形,实现轮履运动形式的转换,有利于移动救援机器人进入复杂的地形;本发明的可重构行走单

一种轮履式可重构变形轮.pdf
本发明公开一种轮履式可重构变形轮,包括固定装置、轮履形态变形装置和履带行进装置;固定装置包括变形轮支撑架和U型支撑架;变形轮支撑架为变形轮的受力主体;U型支撑架安装在变形轮支撑架上并位于变形轮内部;轮履形态变形装置包括变形传动机构和变形连杆结构,变形传动机构用于驱动变形连杆结构可相对于变形轮支撑架伸出或缩回;履带行走装置的传动部分安装在变形轮支撑架上,弹性履带包覆于变形轮的外部轮廓并与变形连杆结构相接触。该轮履式可重构变形轮,具有自由切换两种形态能力和高承载能力,并且实施方式简单,可靠性高,在较多领域应用
一种可快速转换形态的轮履复合式机器人.pdf
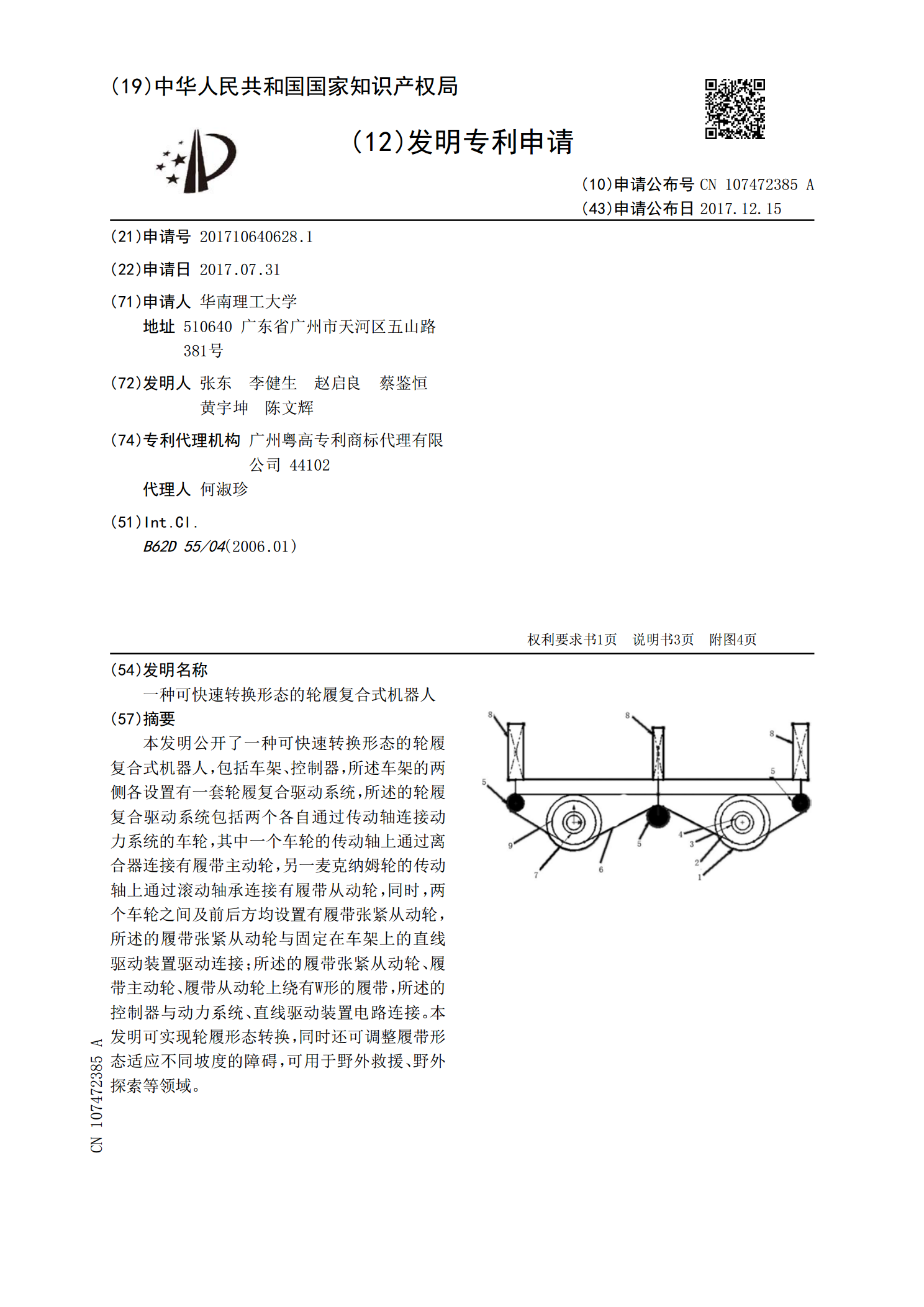
本发明公开了一种可快速转换形态的轮履复合式机器人,包括车架、控制器,所述车架的两侧各设置有一套轮履复合驱动系统,所述的轮履复合驱动系统包括两个各自通过传动轴连接动力系统的车轮,其中一个车轮的传动轴上通过离合器连接有履带主动轮,另一麦克纳姆轮的传动轴上通过滚动轴承连接有履带从动轮,同时,两个车轮之间及前后方均设置有履带张紧从动轮,所述的履带张紧从动轮与固定在车架上的直线驱动装置驱动连接;所述的履带张紧从动轮、履带主动轮、履带从动轮上绕有W形的履带,所述的控制器与动力系统、直线驱动装置电路连接。本发明可实现轮
轮-履-腿两栖移动救援机器人.pdf
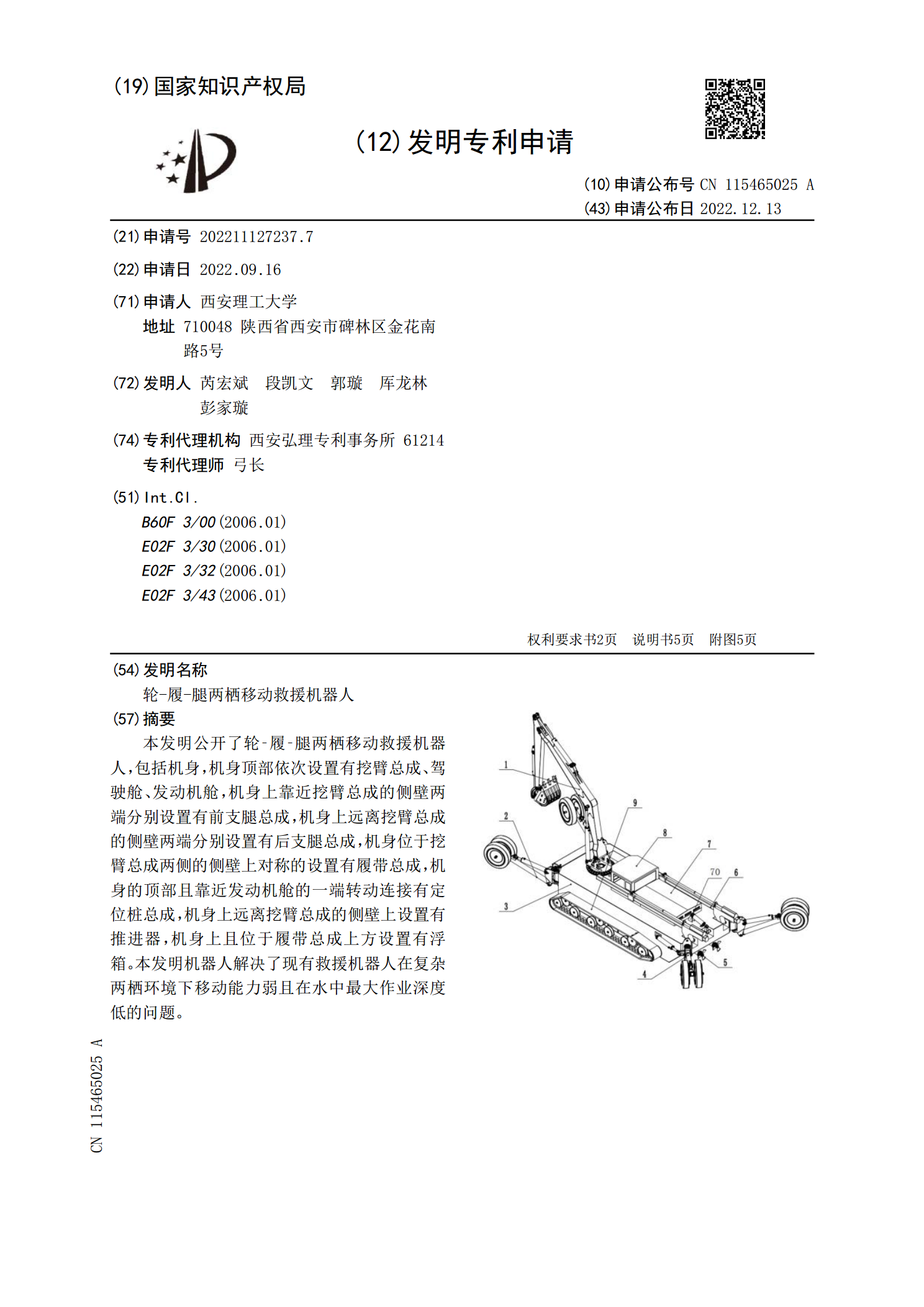
本发明公开了轮‑履‑腿两栖移动救援机器人,包括机身,机身顶部依次设置有挖臂总成、驾驶舱、发动机舱,机身上靠近挖臂总成的侧壁两端分别设置有前支腿总成,机身上远离挖臂总成的侧壁两端分别设置有后支腿总成,机身位于挖臂总成两侧的侧壁上对称的设置有履带总成,机身的顶部且靠近发动机舱的一端转动连接有定位桩总成,机身上远离挖臂总成的侧壁上设置有推进器,机身上且位于履带总成上方设置有浮箱。本发明机器人解决了现有救援机器人在复杂两栖环境下移动能力弱且在水中最大作业深度低的问题。

单自由度轮/履形态可重构行走机构.pdf
本发明涉及一种单自由度轮/履形态可重构行走机构,其包括轮体架、驱动装置、行走装置和形态转换装置,轮体架包括两个对称设置的辐板组件、上连接件和下连接件,两个辐板组件的对称面为横向对称面,辐板组件包括外轮辐板和两个从动齿轮,两个从动齿轮的对称面为纵向对称面,驱动装置包括驱动主轴和两个驱动齿轮,行走装置包括两个结构相同的内齿轮,两个从动齿轮分别与两个内齿轮啮合传动,形态转换装置包括驱动液压缸、两个对称布置的收展机构和中心连接件,通过两个收展机构的收展变形可以实现行走机构轮/履运动形式的切换。本发明为过约束机构,