
一种外骨骼式踝关节康复训练机器人.pdf

书生****瑞梦

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种外骨骼式踝关节康复训练机器人.pdf
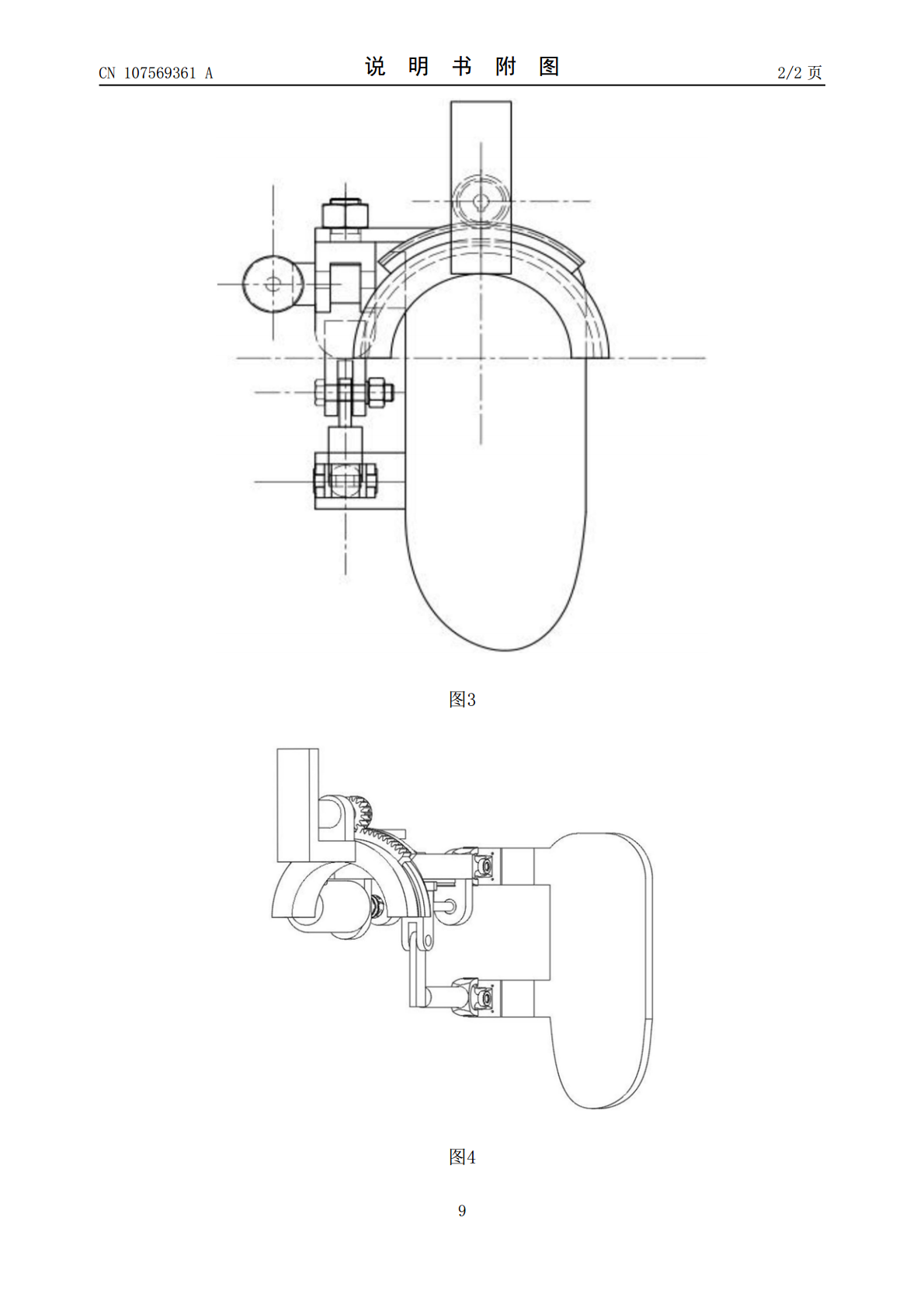
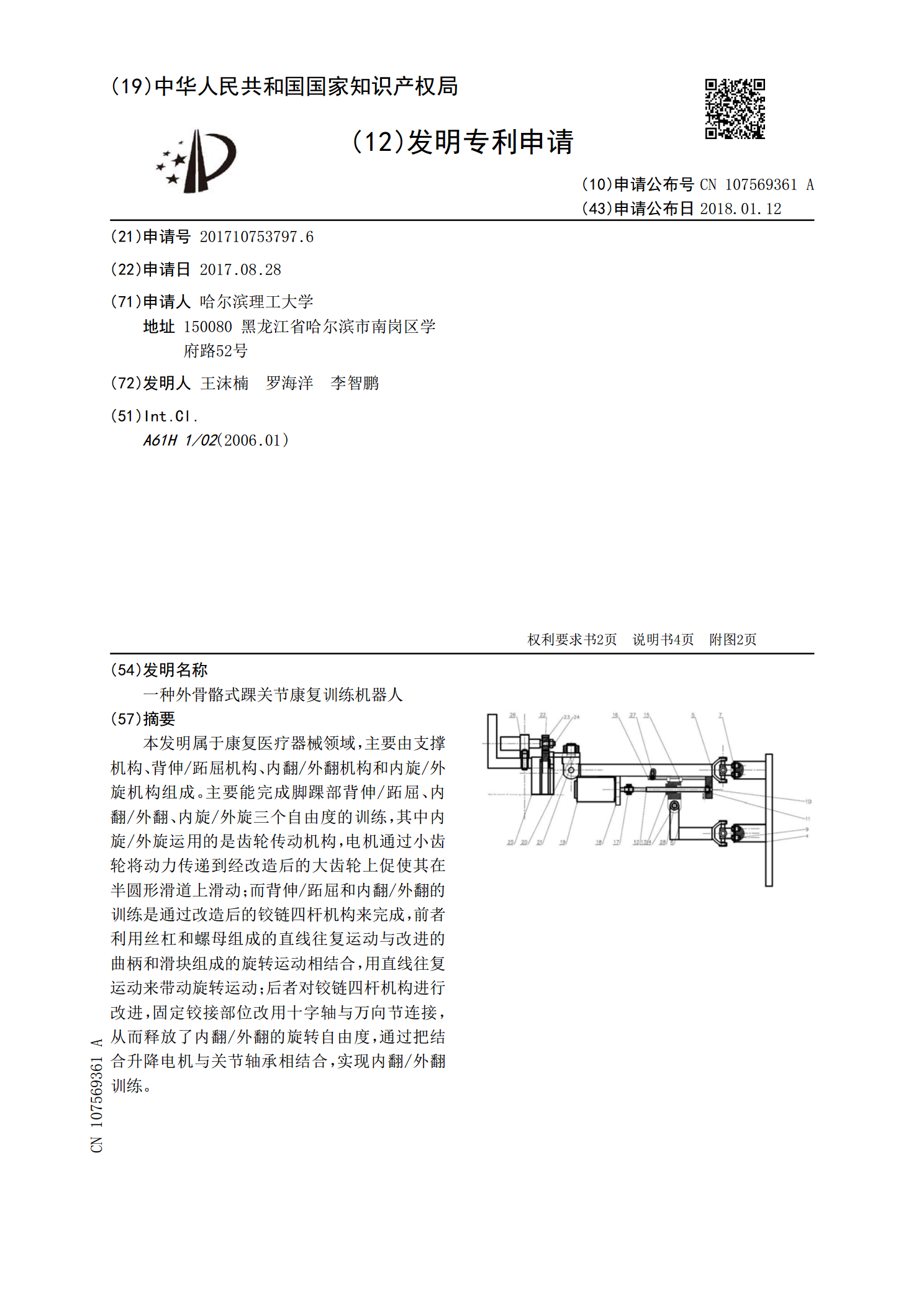
本发明属于康复医疗器械领域,主要由支撑机构、背伸/跖屈机构、内翻/外翻机构和内旋/外旋机构组成。主要能完成脚踝部背伸/跖屈、内翻/外翻、内旋/外旋三个自由度的训练,其中内旋/外旋运用的是齿轮传动机构,电机通过小齿轮将动力传递到经改造后的大齿轮上促使其在半圆形滑道上滑动;而背伸/跖屈和内翻/外翻的训练是通过改造后的铰链四杆机构来完成,前者利用丝杠和螺母组成的直线往复运动与改进的曲柄和滑块组成的旋转运动相结合,用直线往复运动来带动旋转运动;后者对铰链四杆机构进行改进,固定铰接部位改用十字轴与万向节连接,从而释
一种便移式踝关节外骨骼康复训练机器人.pdf
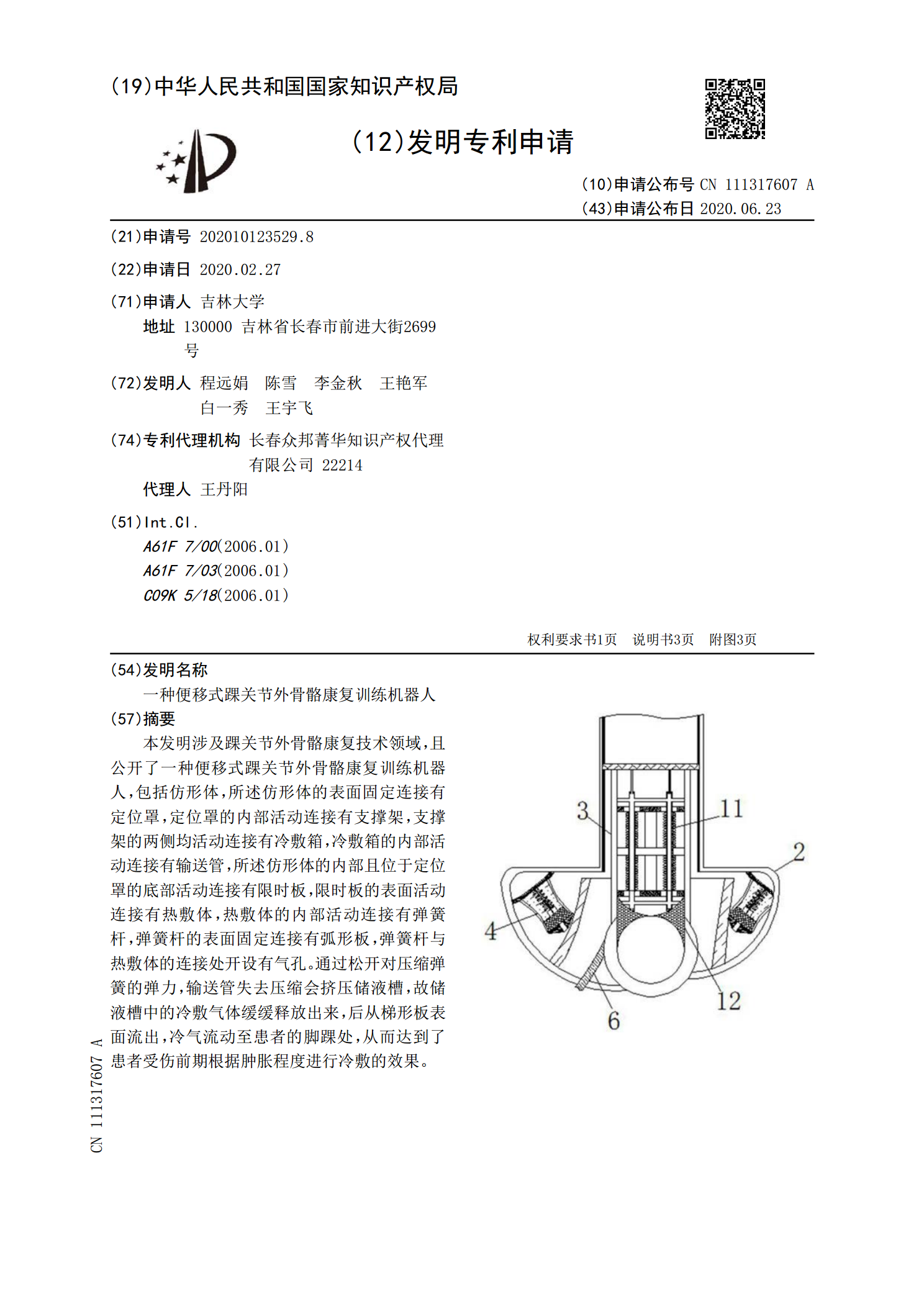
本发明涉及踝关节外骨骼康复技术领域,且公开了一种便移式踝关节外骨骼康复训练机器人,包括仿形体,所述仿形体的表面固定连接有定位罩,定位罩的内部活动连接有支撑架,支撑架的两侧均活动连接有冷敷箱,冷敷箱的内部活动连接有输送管,所述仿形体的内部且位于定位罩的底部活动连接有限时板,限时板的表面活动连接有热敷体,热敷体的内部活动连接有弹簧杆,弹簧杆的表面固定连接有弧形板,弹簧杆与热敷体的连接处开设有气孔。通过松开对压缩弹簧的弹力,输送管失去压缩会挤压储液槽,故储液槽中的冷敷气体缓缓释放出来,后从梯形板表面流出,冷气流
一种外骨骼可穿戴式下肢康复训练机器人装置.pdf
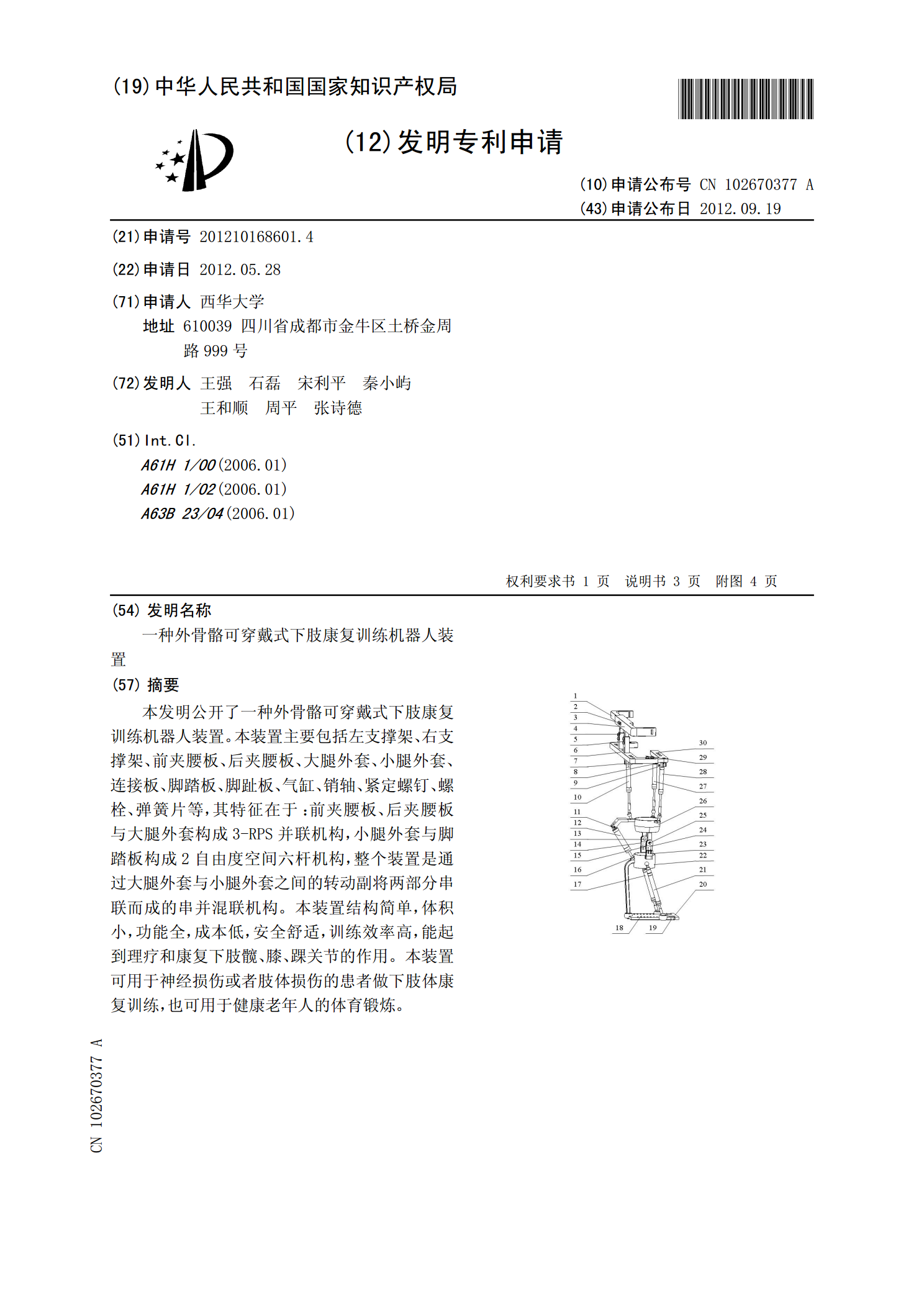
本发明公开了一种外骨骼可穿戴式下肢康复训练机器人装置。本装置主要包括左支撑架、右支撑架、前夹腰板、后夹腰板、大腿外套、小腿外套、连接板、脚踏板、脚趾板、气缸、销轴、紧定螺钉、螺栓、弹簧片等,其特征在于:前夹腰板、后夹腰板与大腿外套构成3-RPS并联机构,小腿外套与脚踏板构成2自由度空间六杆机构,整个装置是通过大腿外套与小腿外套之间的转动副将两部分串联而成的串并混联机构。本装置结构简单,体积小,功能全,成本低,安全舒适,训练效率高,能起到理疗和康复下肢髋、膝、踝关节的作用。本装置可用于神经损伤或者肢体损伤的

一种穿戴式手指康复训练外骨骼.pdf
本发明公开了一种穿戴式手指康复训练外骨骼,包括了支撑架、驱动器、第一连杆、第二连杆、第三连杆、第一指骨支撑件、第二指骨支撑件;所诉支撑架、所述驱动器和所诉第一连杆组成第一个三角形结构,所诉第一连杆、所述第二连杆和近指节组成第二个三角形结构,所述第二连杆、所诉第三连杆和中指节组成第三个三角形结构。本发明可以带动手指进行周期性的弯曲训练,结构性好,外观简洁,成本较低,体积较小,适合在家庭或者社区中推广,能供满足不同使用者的要求。
一种踝关节外骨骼.pdf
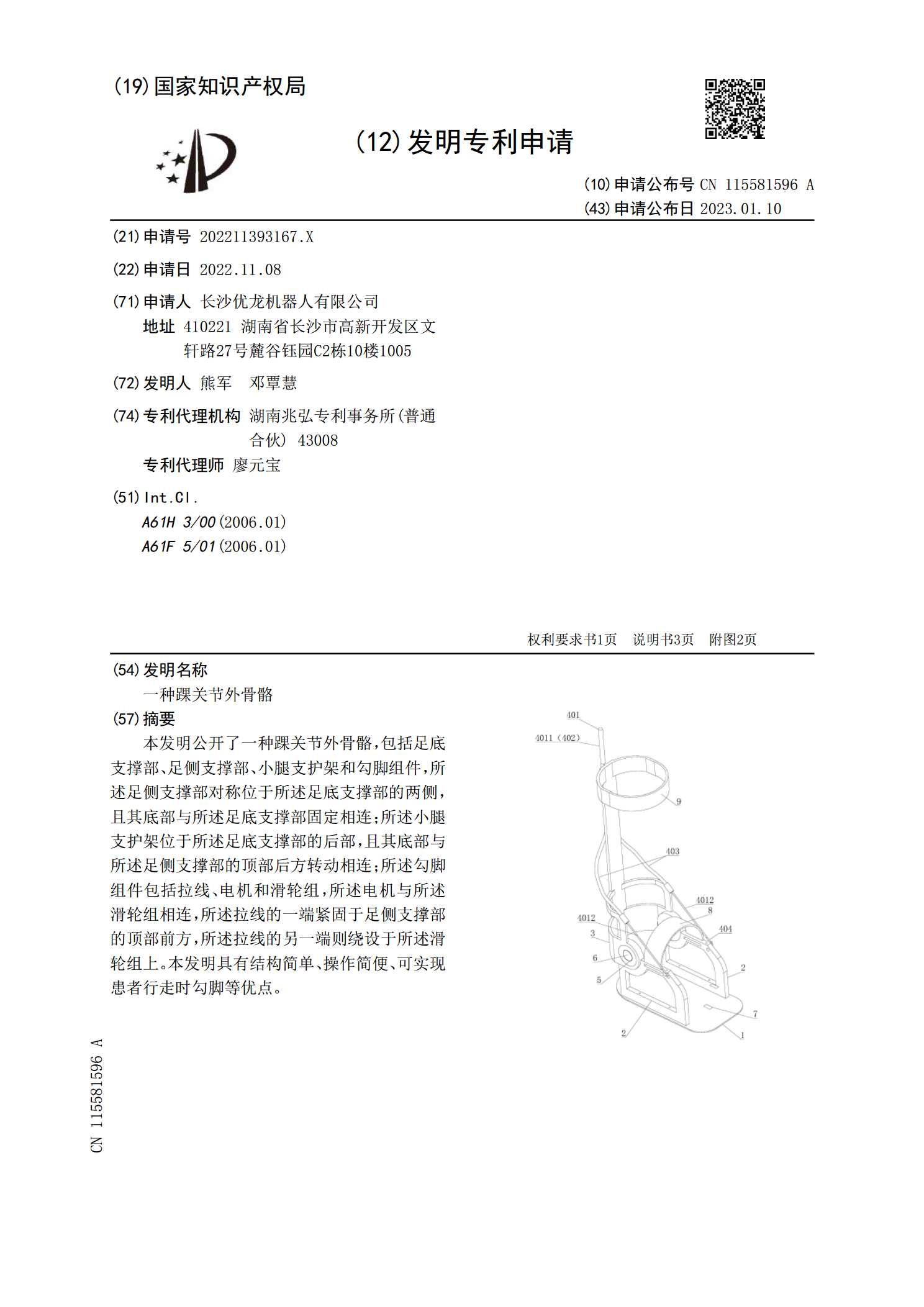
本发明公开了一种踝关节外骨骼,包括足底支撑部、足侧支撑部、小腿支护架和勾脚组件,所述足侧支撑部对称位于所述足底支撑部的两侧,且其底部与所述足底支撑部固定相连;所述小腿支护架位于所述足底支撑部的后部,且其底部与所述足侧支撑部的顶部后方转动相连;所述勾脚组件包括拉线、电机和滑轮组,所述电机与所述滑轮组相连,所述拉线的一端紧固于足侧支撑部的顶部前方,所述拉线的另一端则绕设于所述滑轮组上。本发明具有结构简单、操作简便、可实现患者行走时勾脚等优点。