
一种低位自动叠盘、拆盘装置.pdf

宛菡****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种低位自动叠盘、拆盘装置.pdf
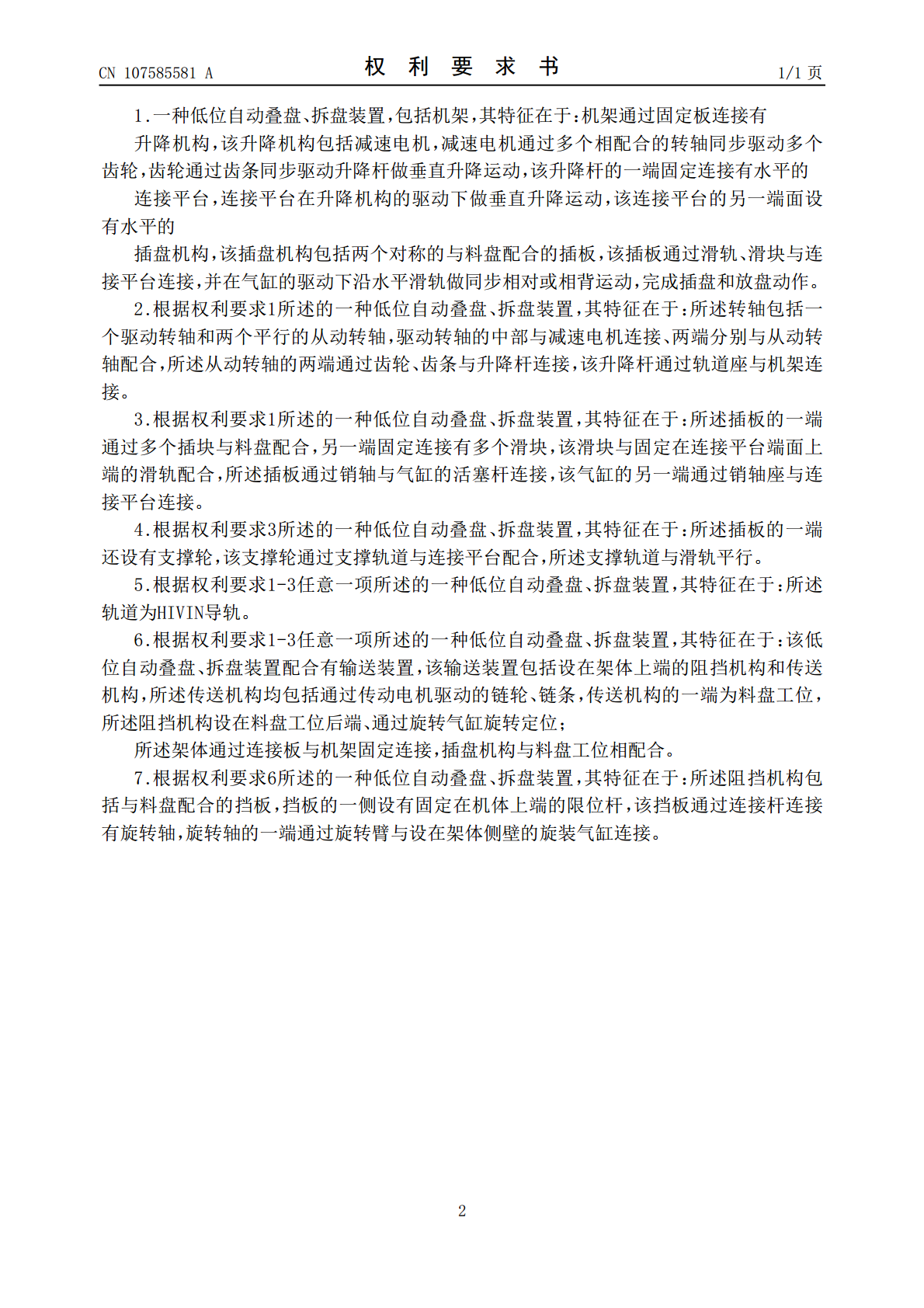
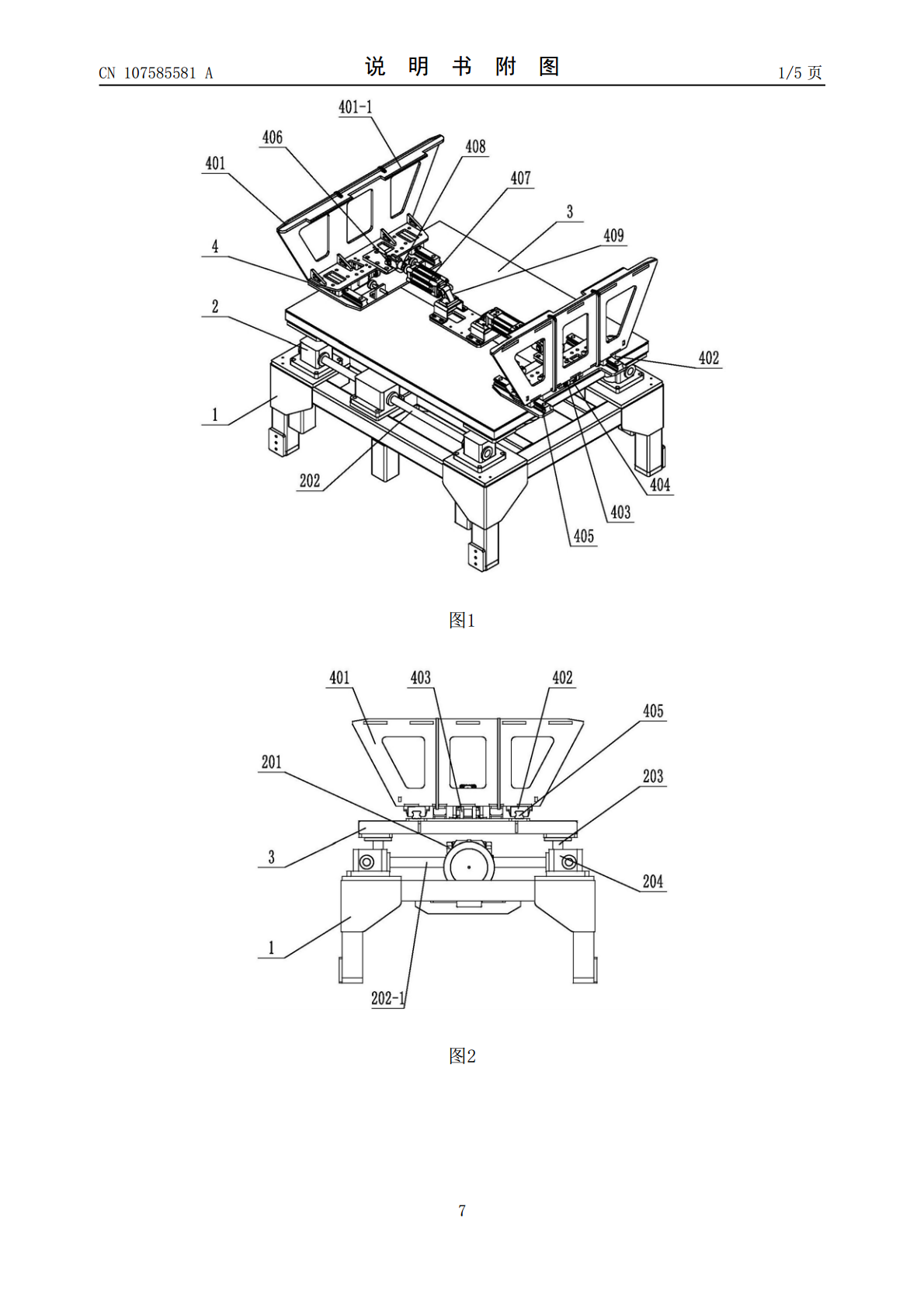
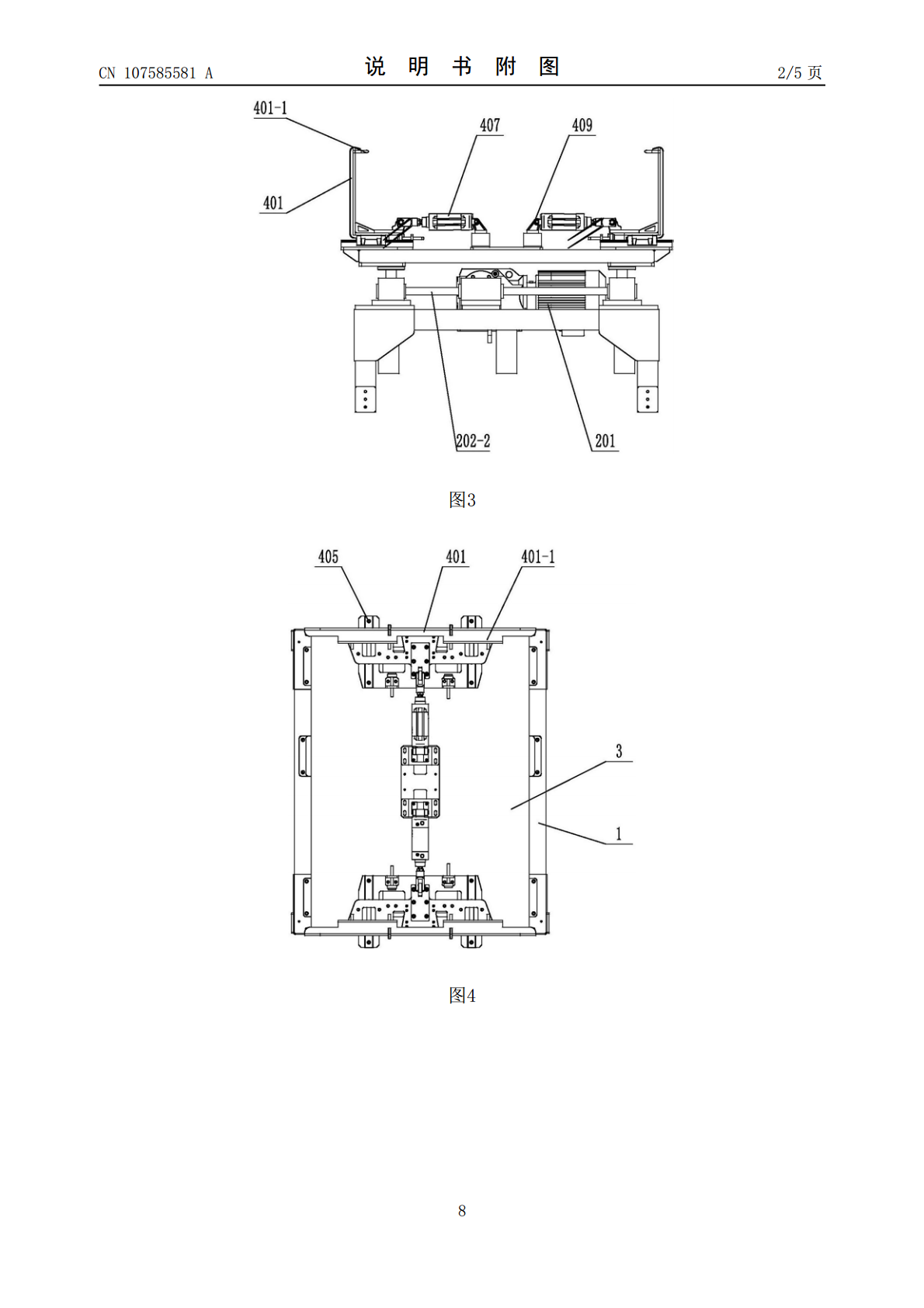
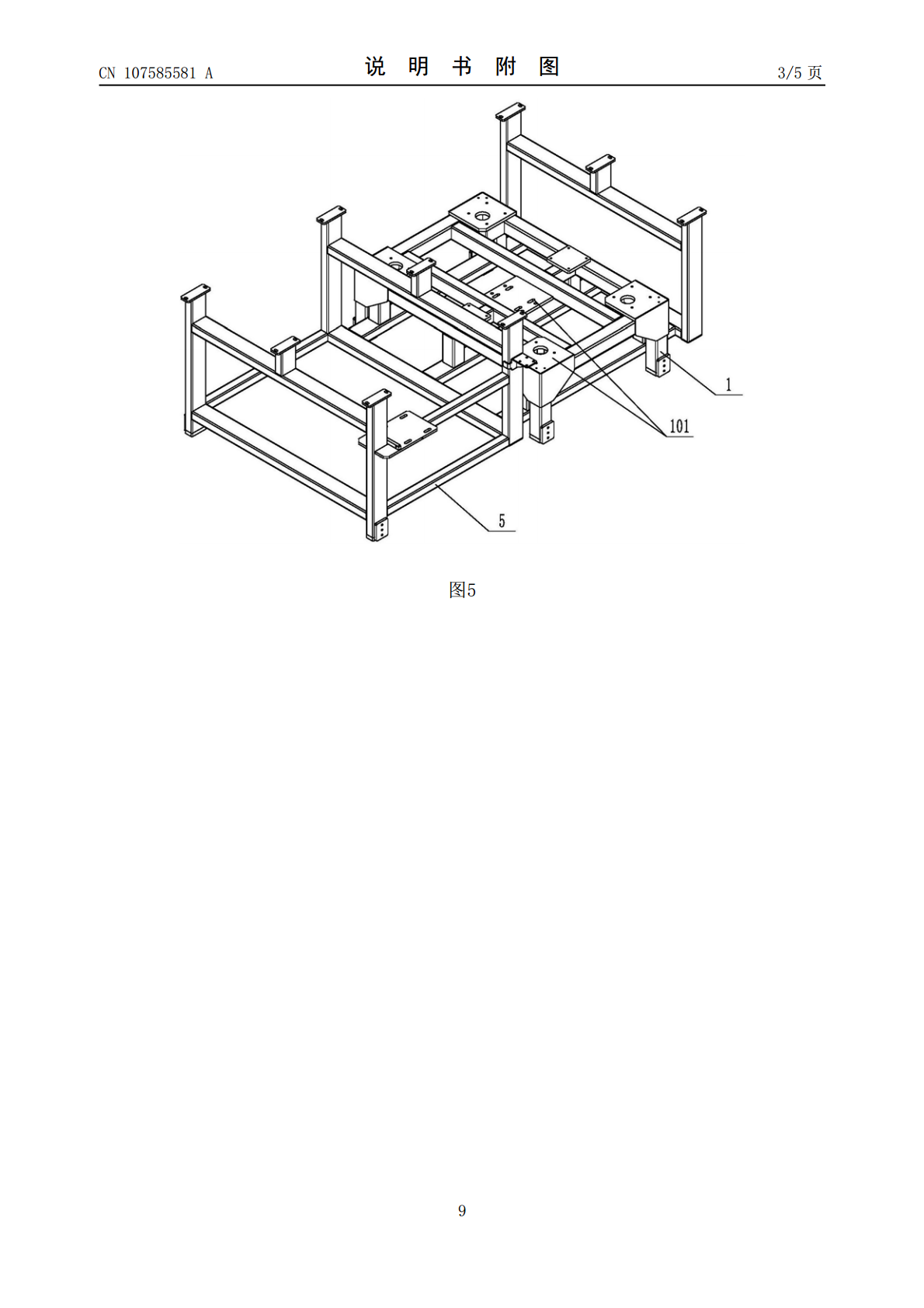
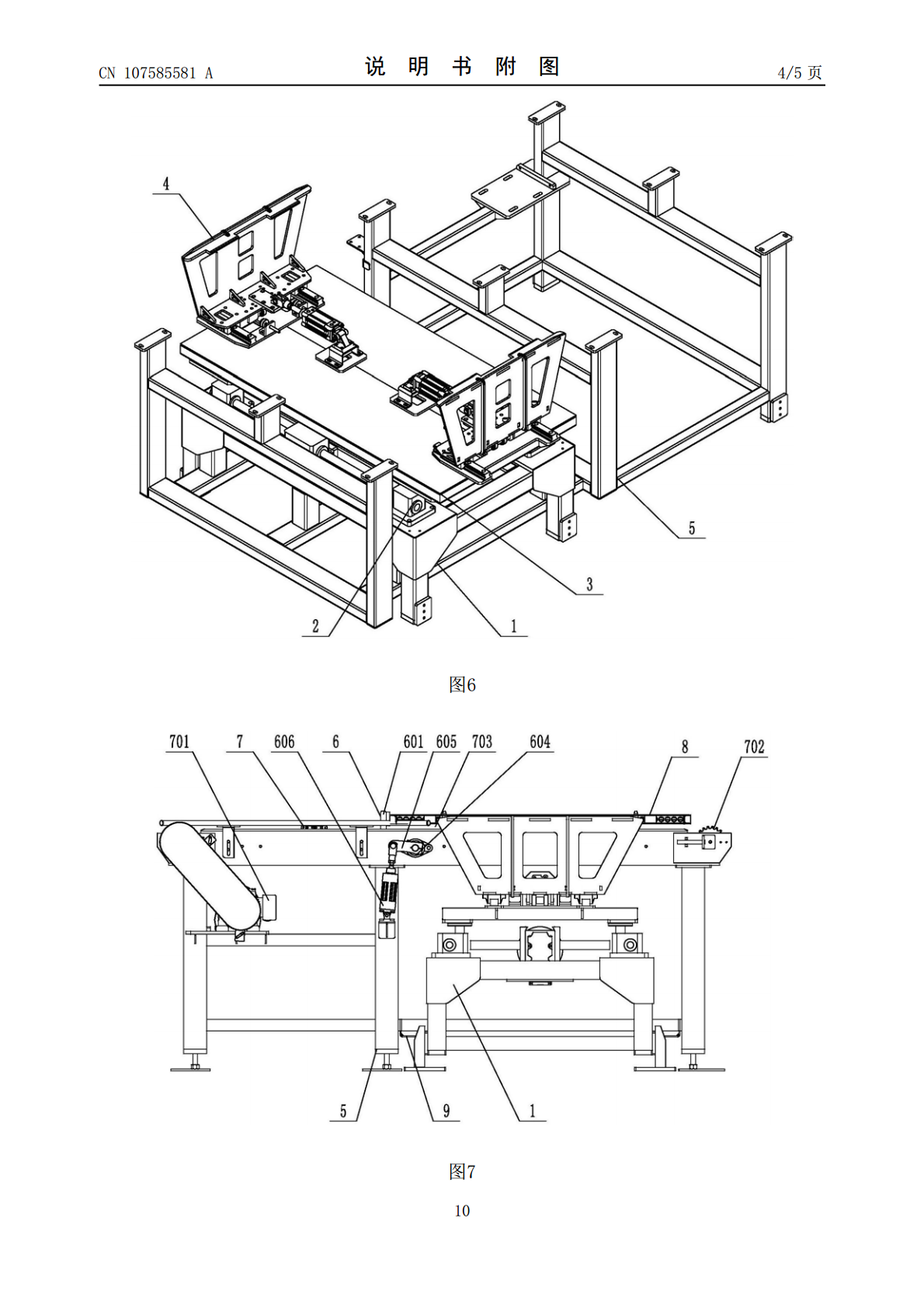
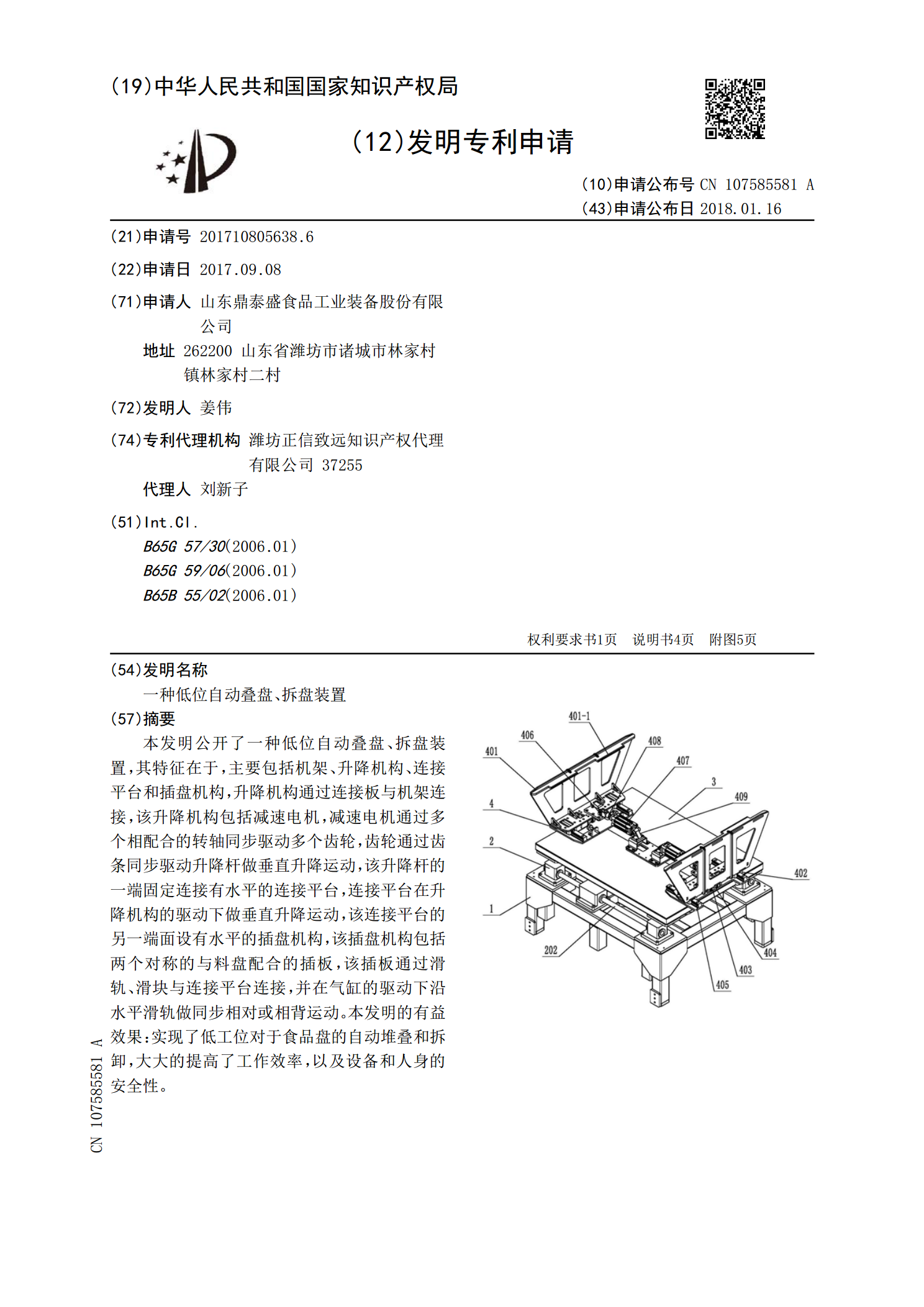
本发明公开了一种低位自动叠盘、拆盘装置,其特征在于,主要包括机架、升降机构、连接平台和插盘机构,升降机构通过连接板与机架连接,该升降机构包括减速电机,减速电机通过多个相配合的转轴同步驱动多个齿轮,齿轮通过齿条同步驱动升降杆做垂直升降运动,该升降杆的一端固定连接有水平的连接平台,连接平台在升降机构的驱动下做垂直升降运动,该连接平台的另一端面设有水平的插盘机构,该插盘机构包括两个对称的与料盘配合的插板,该插板通过滑轨、滑块与连接平台连接,并在气缸的驱动下沿水平滑轨做同步相对或相背运动。本发明的有益效果:实现了

一种自动拆叠盘装置.pdf
本发明提供了一种自动拆叠盘装置,包括外壳装置、链动装置和拨叉装置;所述外壳装置为包括框架和壳板的柱体结构;所述链动装置包括减速马达、安装组件、转轴组件、齿轮组件和链条组件;所述安装组件包括水平安装柱、转轴安装下板以及转轴安装上板;所述转轴组件包括上转轴和下转轴;所述齿轮组件包括第一主动齿轮、第二主动齿轮、第一啮合齿轮、第二啮合齿轮、连接齿轮以及上齿轮和下齿轮;所述链条组件包括主动链条、连接链条和从动链条;所述拨叉装置包括拨叉导轨和拨叉。本发明所述自动拆叠盘装置采用双链式提升以及自动拨叉系统相结合的方式具有
托盘自动拆盘叠盘装置及方法.pdf
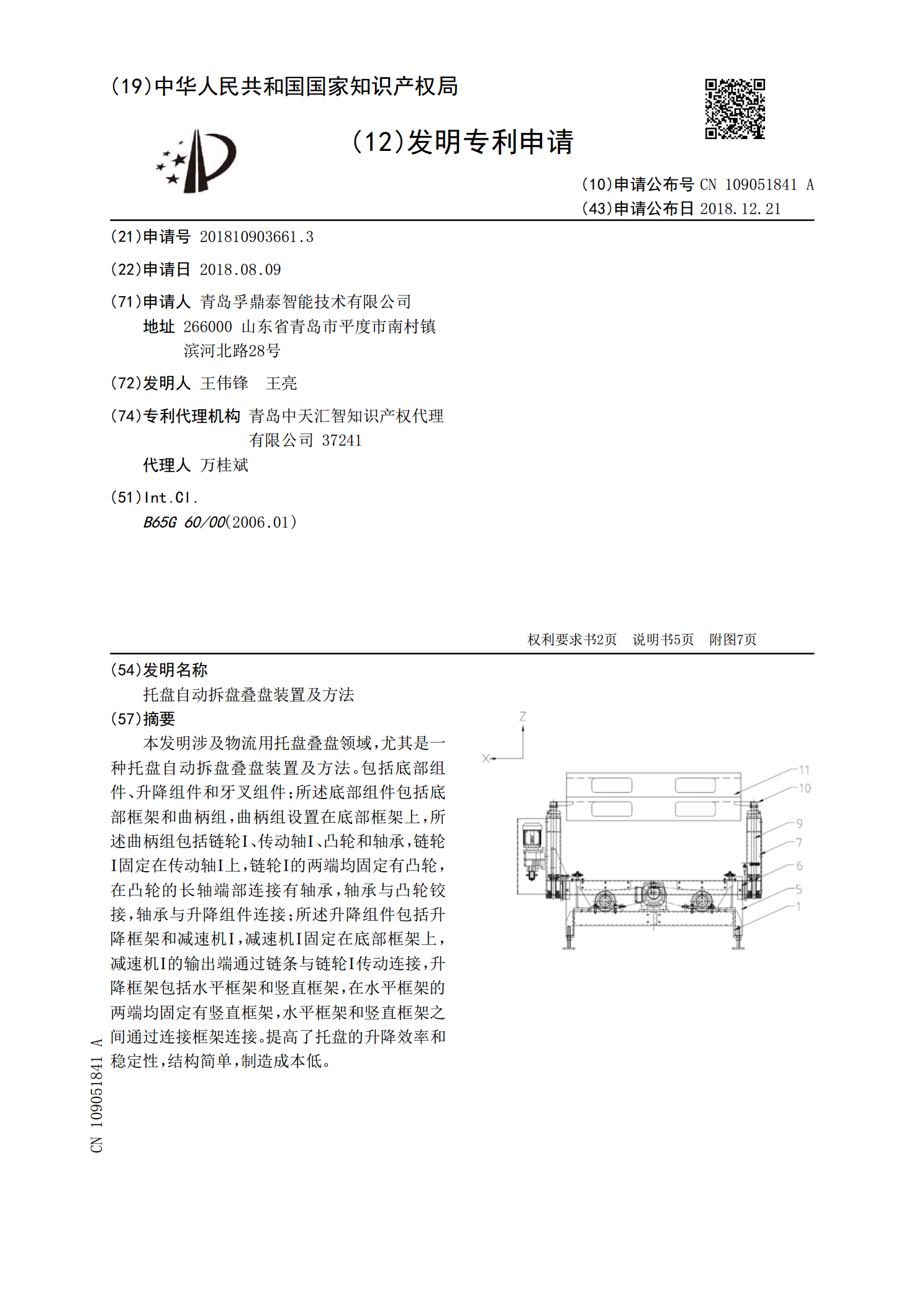
本发明涉及物流用托盘叠盘领域,尤其是一种托盘自动拆盘叠盘装置及方法。包括底部组件、升降组件和牙叉组件;所述底部组件包括底部框架和曲柄组,曲柄组设置在底部框架上,所述曲柄组包括链轮Ⅰ、传动轴Ⅰ、凸轮和轴承,链轮Ⅰ固定在传动轴Ⅰ上,链轮Ⅰ的两端均固定有凸轮,在凸轮的长轴端部连接有轴承,轴承与凸轮铰接,轴承与升降组件连接;所述升降组件包括升降框架和减速机Ⅰ,减速机Ⅰ固定在底部框架上,减速机Ⅰ的输出端通过链条与链轮Ⅰ传动连接,升降框架包括水平框架和竖直框架,在水平框架的两端均固定有竖直框架,水平框架和竖直框架之间
自动换盘、叠盘装置及自动换盘、叠盘方法.pdf
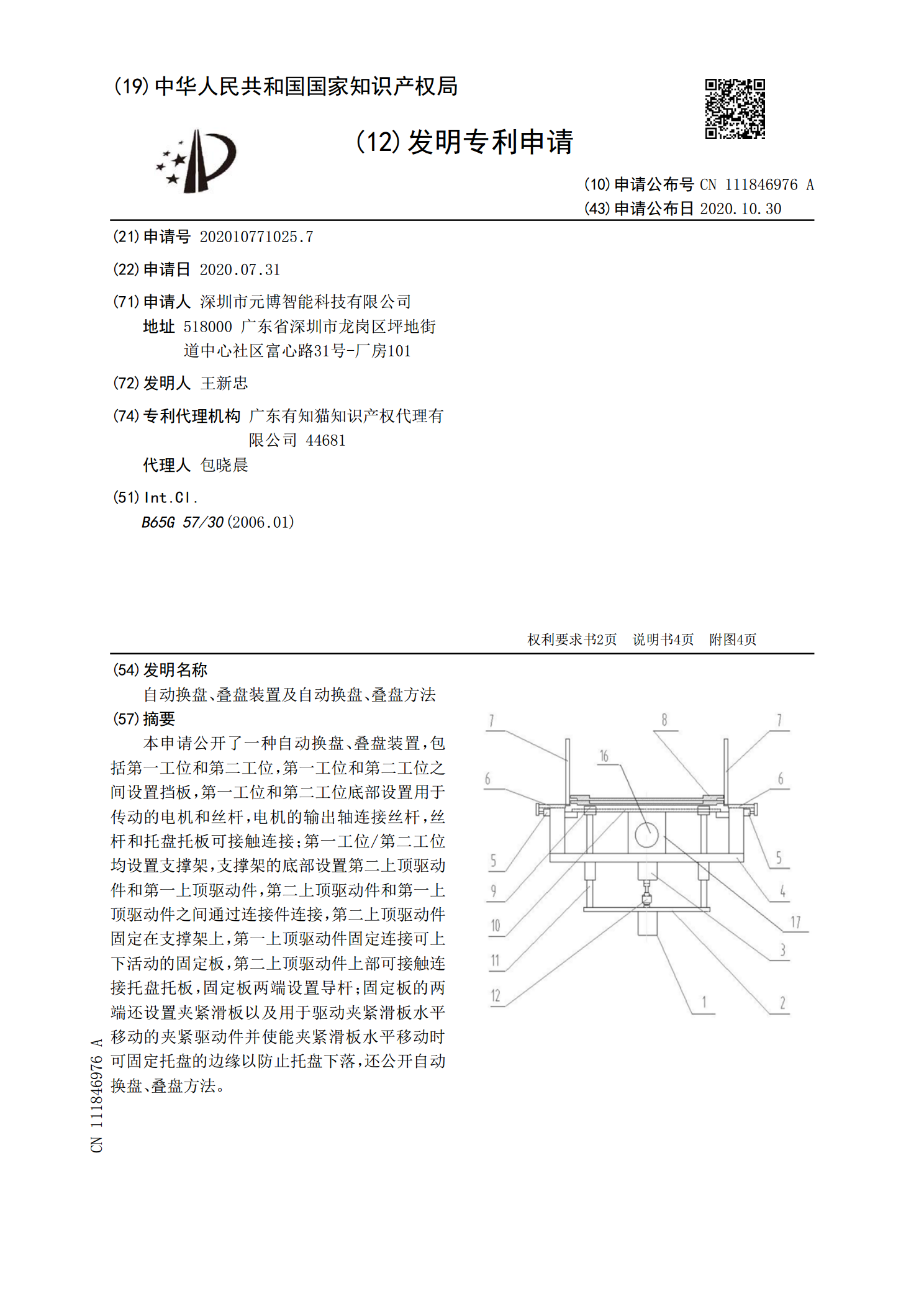
本申请公开了一种自动换盘、叠盘装置,包括第一工位和第二工位,第一工位和第二工位之间设置挡板,第一工位和第二工位底部设置用于传动的电机和丝杆,电机的输出轴连接丝杆,丝杆和托盘托板可接触连接;第一工位/第二工位均设置支撑架,支撑架的底部设置第二上顶驱动件和第一上顶驱动件,第二上顶驱动件和第一上顶驱动件之间通过连接件连接,第二上顶驱动件固定在支撑架上,第一上顶驱动件固定连接可上下活动的固定板,第二上顶驱动件上部可接触连接托盘托板,固定板两端设置导杆;固定板的两端还设置夹紧滑板以及用于驱动夹紧滑板水平移动的夹紧驱

一种秧盘自动叠盘装置.pdf
本发明公开了一种秧盘自动叠盘装置,包括机架,机架上设有输送秧盘的输送机构和顶起秧盘的顶起机构,以及相对设置并相互配合以承托多个秧盘的托起机构,各托起机构包括侧架和多个用于承托秧盘的托片,各托片以能进入和离开输送机构上方的可伸缩方式连接于侧架上,侧架上设有伸缩驱动组件,伸缩驱动组件与各托片连接并能驱动各托片伸缩。本发明通过伸缩驱动组件能驱动各托片进行伸出,使各托片能进入输送机构的上方对顶起机构顶起的秧盘进行承托,当达到所设叠盘的个数后,伸缩驱动组件再驱动各托片进行收缩,使各托片离开输送机构的上方,从而实现了