
电动制动系统和电动制动装置.pdf

Th****s3

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动制动系统和电动制动装置.pdf
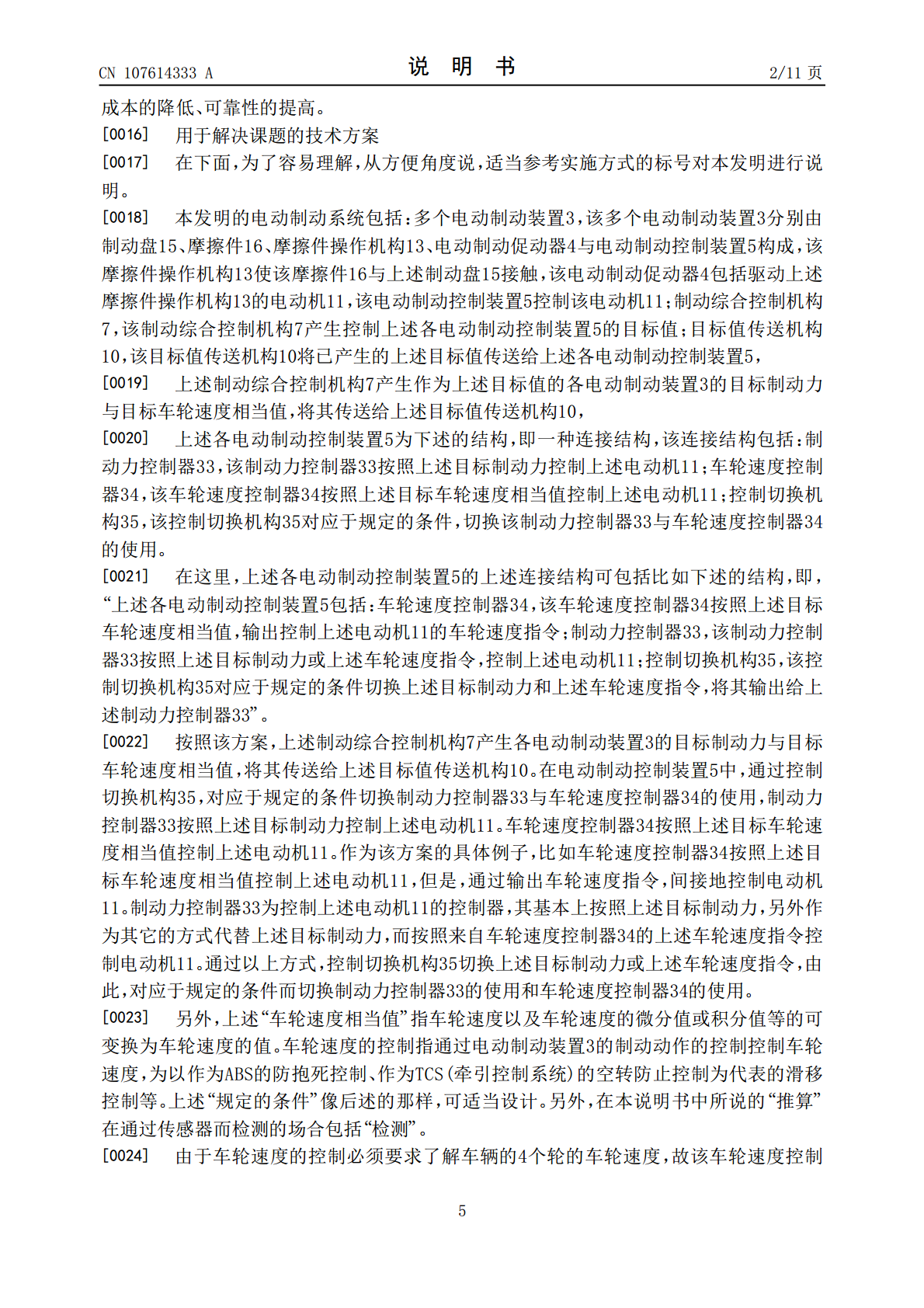
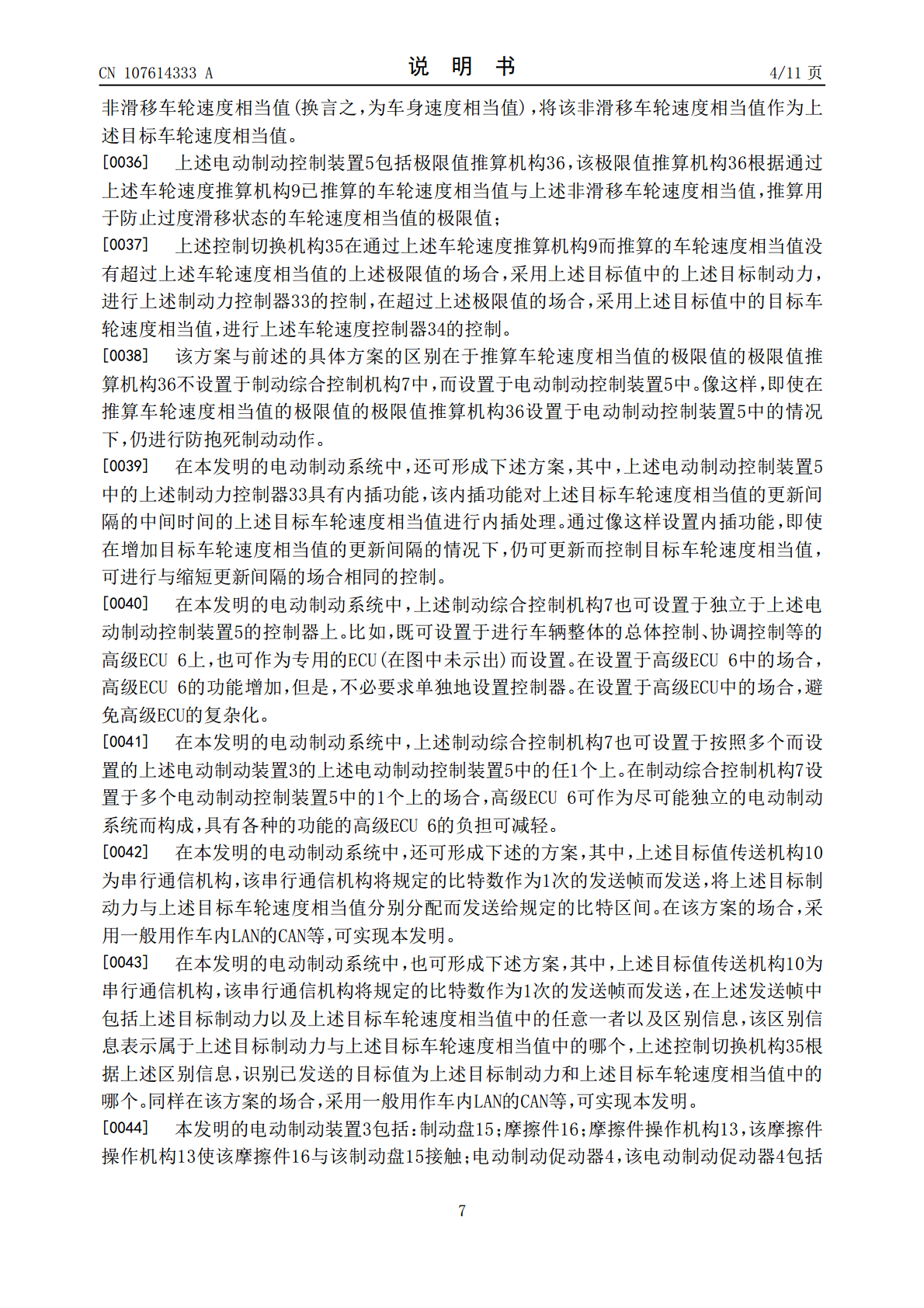
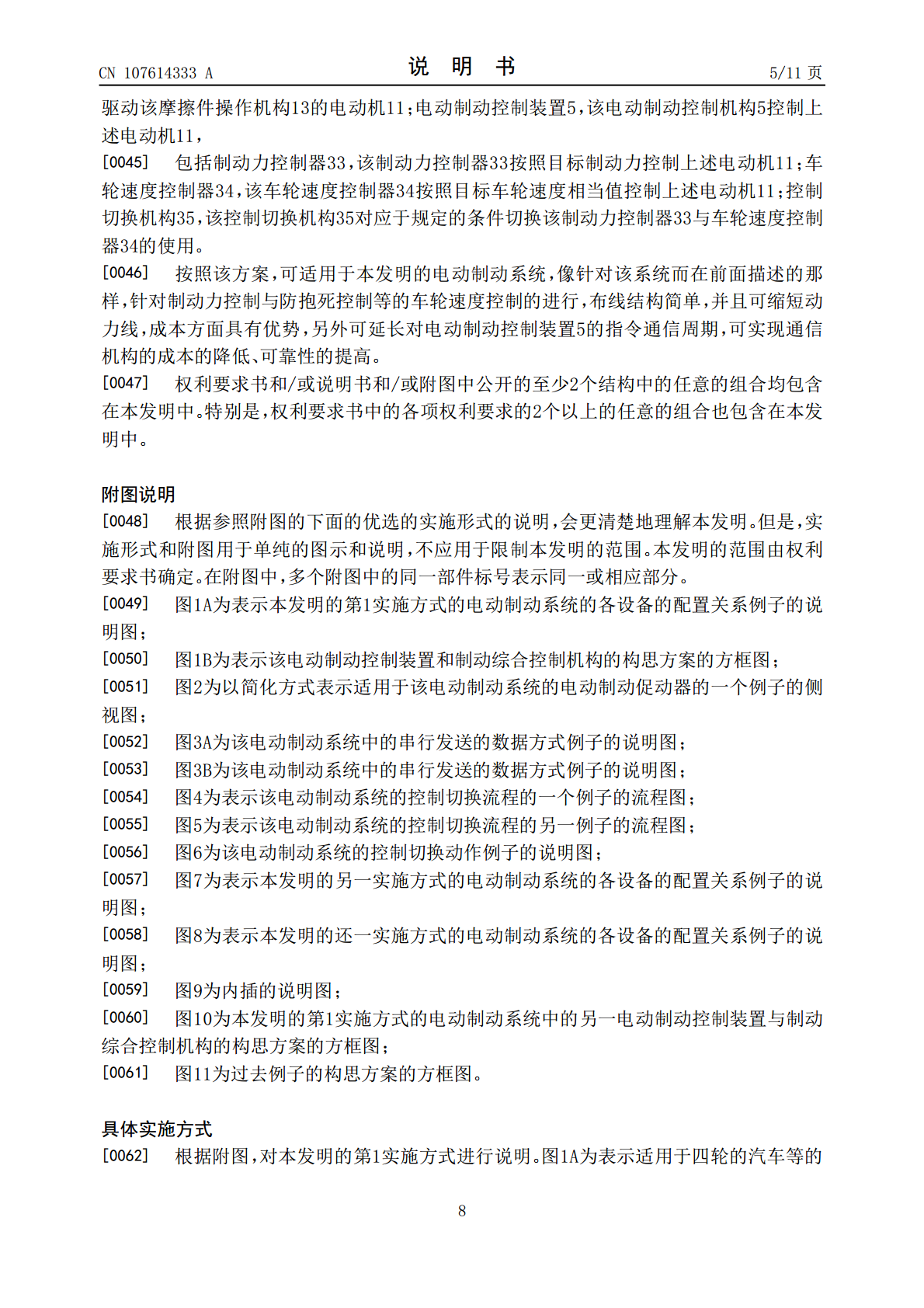
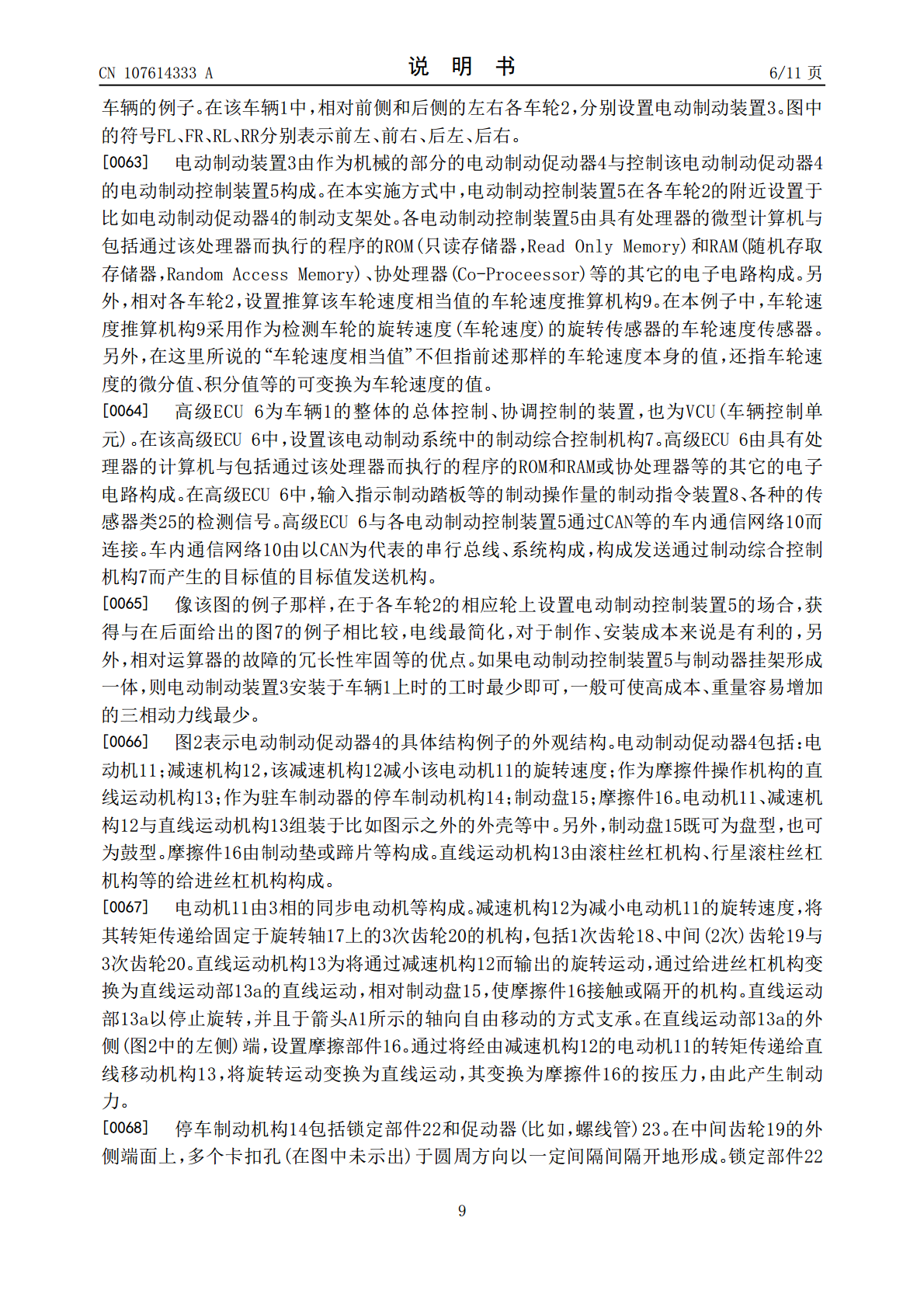
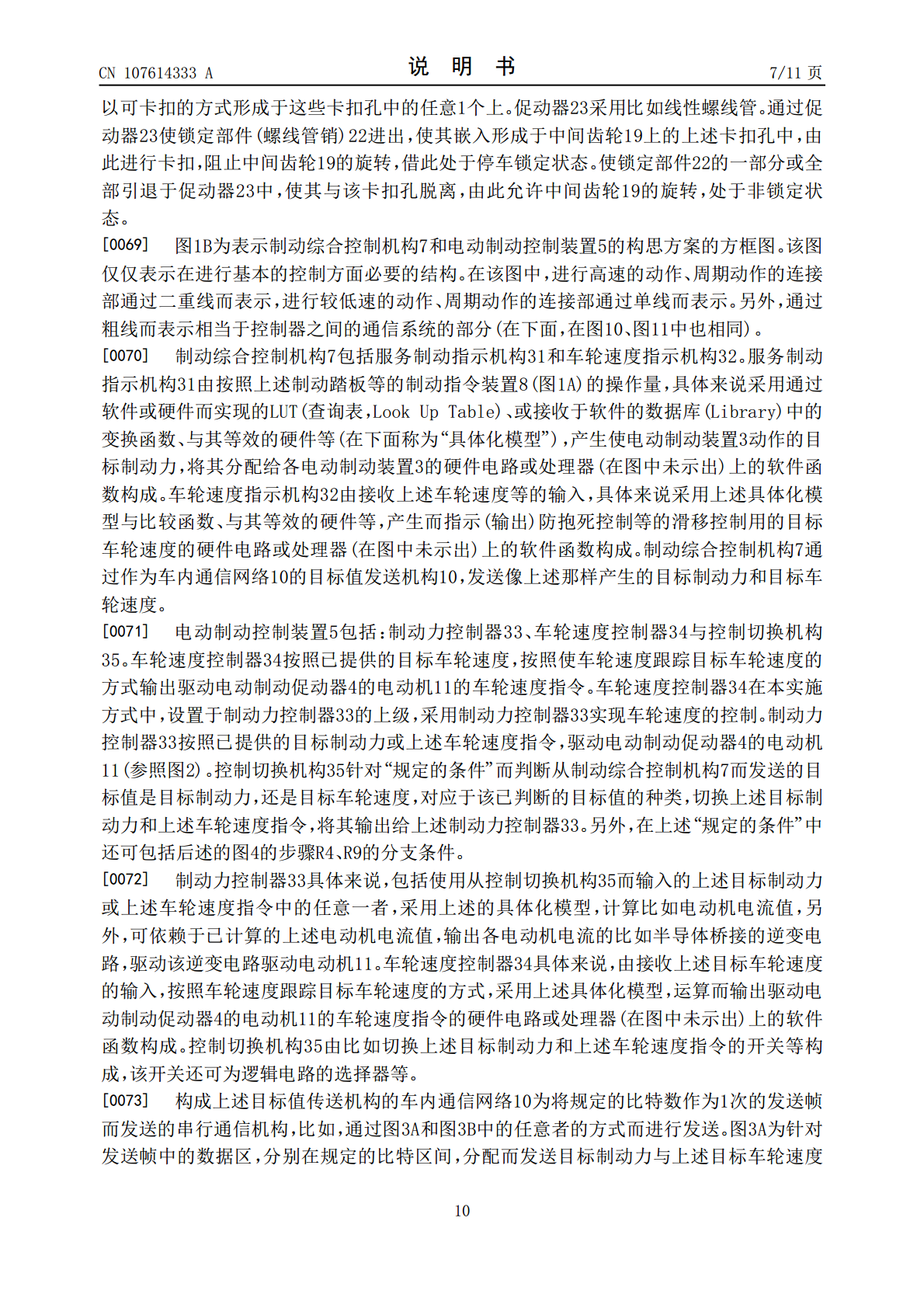
本发明的课题在于提供一种电动制动系统以及电动制动装置,其中,针对制动力控制与防抱死控制等的车轮速度控制的进行,布线结构简单并且可缩短动力线,成本方面具有优越性,另外可延长电动制动装置的指令通信周期,可实现通信机构的成本的降低,可靠性的提高。制动综合控制机构(7)产生作为上述目标值的各电动制动装置(3)的目标制动力与目标车轮速度相当值,将其传送给上述目标值传送机构(10)。各电动制动装置(3)的电动制动控制装置(5)包括:制动力控制器(33),该制动力控制器33按照目标制动力控制电动机(11);车轮速度控制
电动制动系统的控制装置和电动制动系统的控制方法.pdf
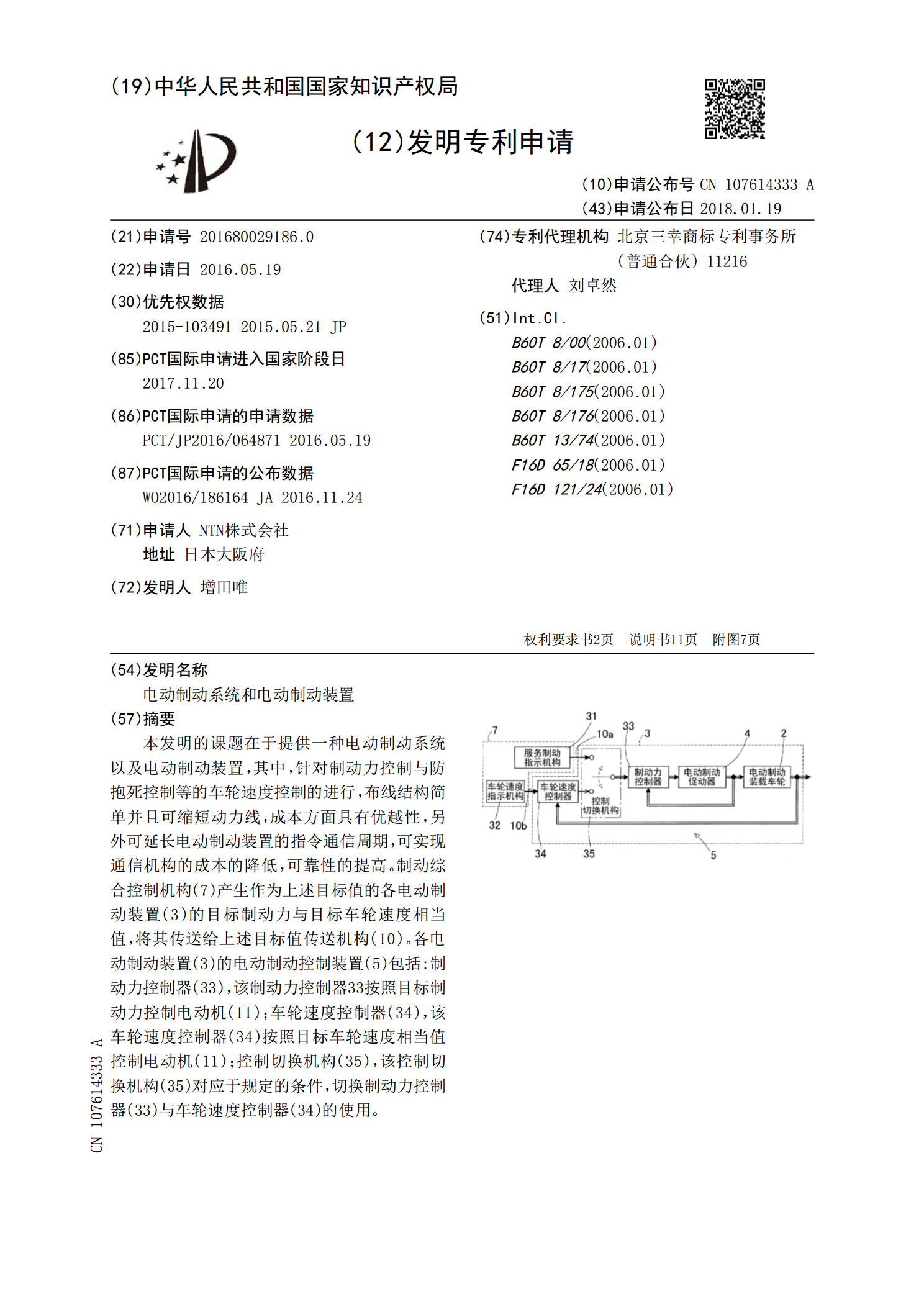
本发明提供一种电动制动系统的控制装置和电动制动系统的控制方法,其无论是否发生制动动作,都降低电动制动系统中消耗的电力。本发明包括由制动ECU(1151)、制动钳ECU(110)、(111)、(113)构成的第1制动系统,和由制动ECU(1161)、制动钳ECU(109)、(112)、(114)构成的第2制动系统。制动ECU(1151)包括基于车辆的行驶信息控制对制动钳ECU(110)、(111)、(113)的电源接通和电源断开的状况判断部(1152),制动ECU(1161)包括基于行驶时和制动动作时的车辆
电动助力制动装置和制动方法.pdf
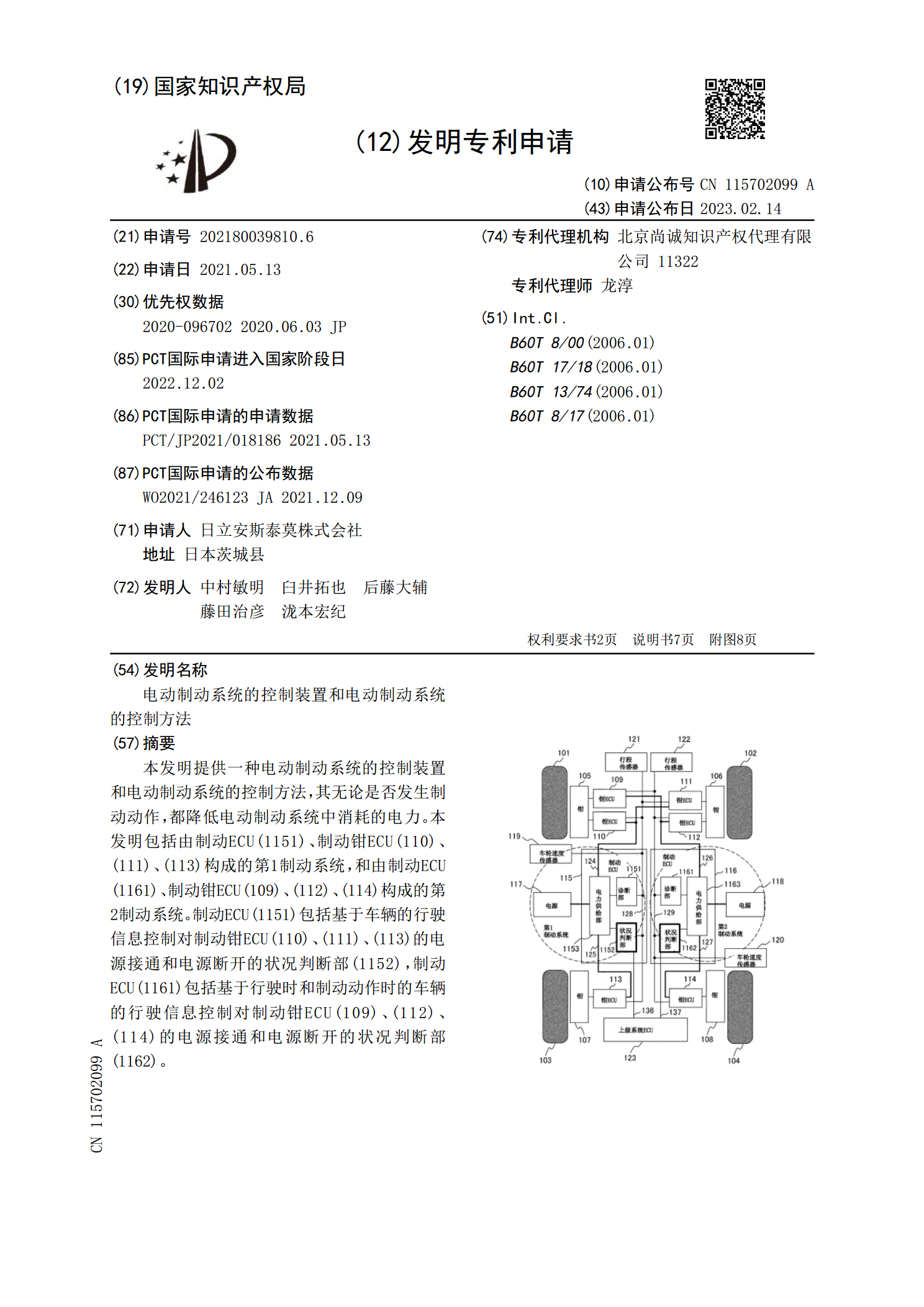
本发明公开了一种电动助力制动装置和制动方法,所述电动助力制动装置的制动力解耦单元采用中空的梯型丝杆副将踏板力与电机扭矩解耦,并联作用到制动主缸单元;电机助力传动单元采用两级齿轮机构将电机扭矩放大,并设有电磁离合器可锁紧传动轴,防扭转及导向单元可防止梯型丝杆在移动过程发生扭转,起到对梯型丝杆的导向作用。本发明所述的制动方法,电子控制单元根据采集的设置在装置内的压力传感器,油压传感器,以及踏板行程等信号,控制电机的转速与转角,电磁离合器的锁紧与松开,实现驾驶员踏板力与电动助力的解耦,符合电动汽车在多个制动工况

电动驻车制动用驱动装置和电动驻车制动装置.pdf
在本发明中,驻车制动促动器通过下述方式在车轮处产生制动力:将被该电动驻车制动用驱动装置旋转的螺杆构件的旋转运动转换成直线运动,并且将所转换的直线运动传递至活塞,并且借助于活塞抵靠盘式转子按压刹车片。电动驻车制动用驱动装置设置有电动马达和减速机构,该减速机构将电动马达的驱动力传递至驻车制动促动器。减速机构设置有齿轮本体和行星齿轮机构,行星齿轮机构设置在齿轮本体内并且电动马达的驱动力被输入至行星齿轮机构中。在周向方向上能够被压缩的缓冲橡胶介于齿轮本体与行星齿轮机构的齿圈之间。
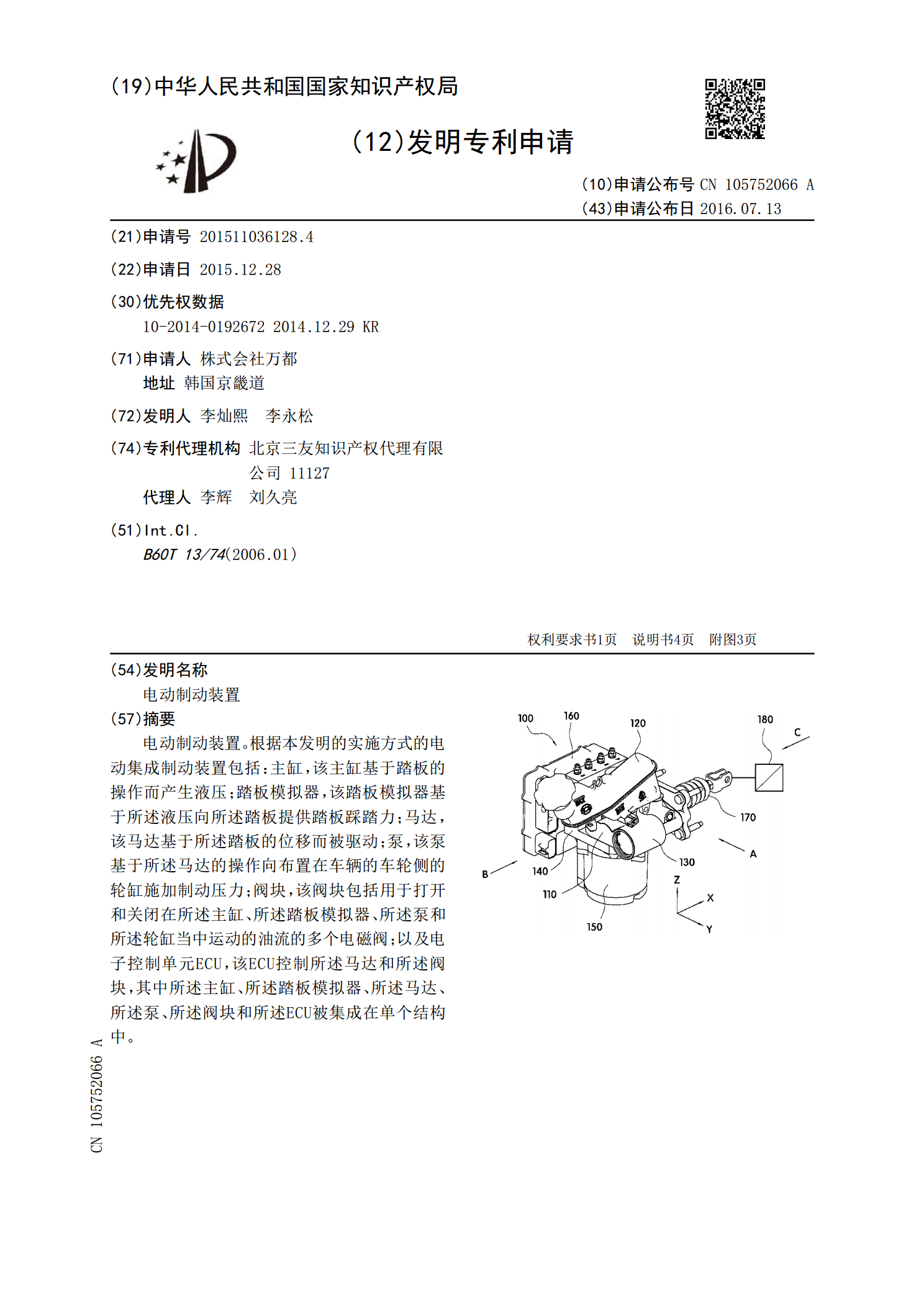
电动制动装置.pdf
电动制动装置。根据本发明的实施方式的电动集成制动装置包括:主缸,该主缸基于踏板的操作而产生液压;踏板模拟器,该踏板模拟器基于所述液压向所述踏板提供踏板踩踏力;马达,该马达基于所述踏板的位移而被驱动;泵,该泵基于所述马达的操作向布置在车辆的车轮侧的轮缸施加制动压力;阀块,该阀块包括用于打开和关闭在所述主缸、所述踏板模拟器、所述泵和所述轮缸当中运动的油流的多个电磁阀;以及电子控制单元ECU,该ECU控制所述马达和所述阀块,其中所述主缸、所述踏板模拟器、所述马达、所述泵、所述阀块和所述ECU被集成在单个结构中。