
线控转向系统的转向控制装置和方法.pdf

永香****能手

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
线控转向系统的转向控制装置和方法.pdf
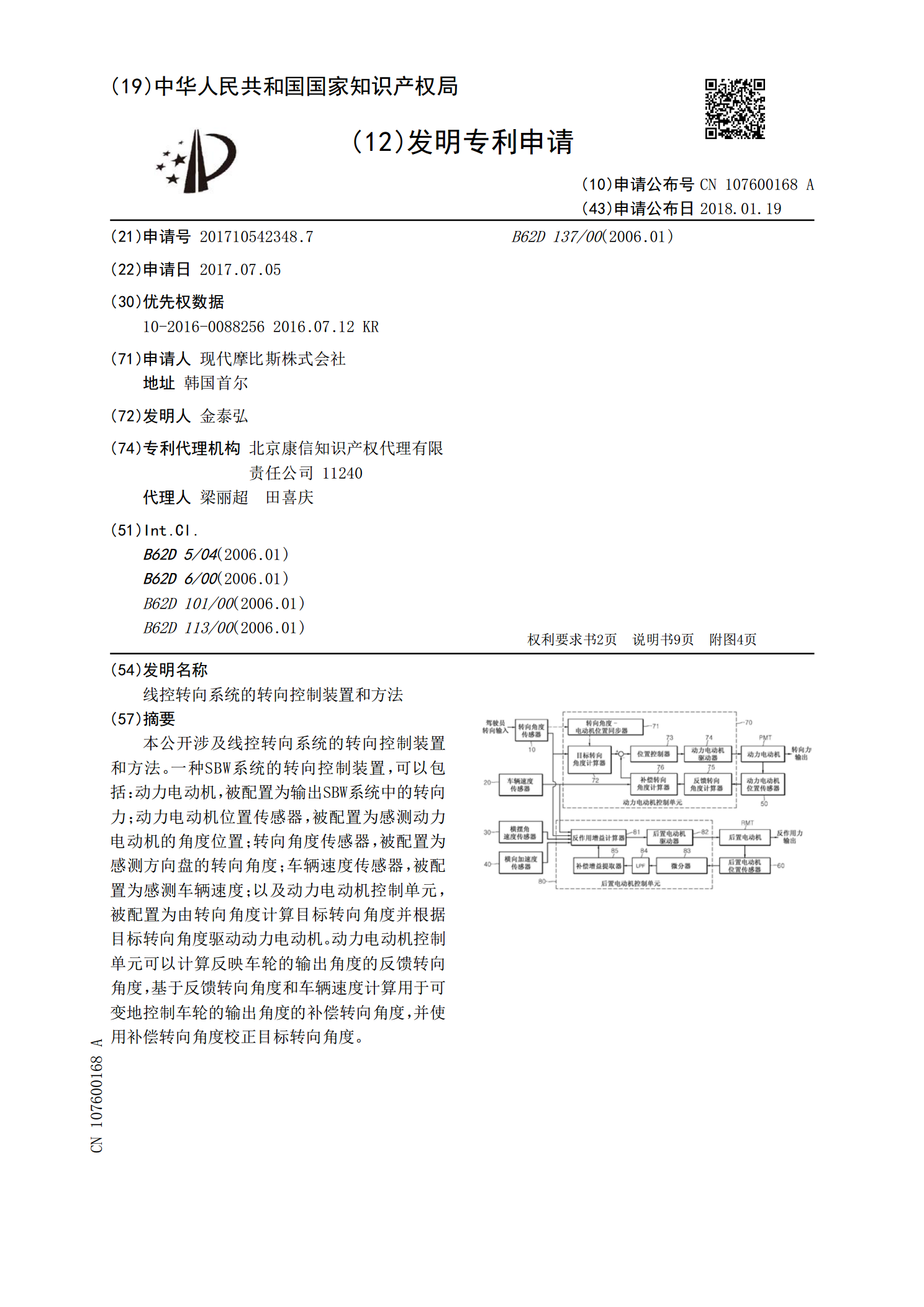
本公开涉及线控转向系统的转向控制装置和方法。一种SBW系统的转向控制装置,可以包括:动力电动机,被配置为输出SBW系统中的转向力;动力电动机位置传感器,被配置为感测动力电动机的角度位置;转向角度传感器,被配置为感测方向盘的转向角度;车辆速度传感器,被配置为感测车辆速度;以及动力电动机控制单元,被配置为由转向角度计算目标转向角度并根据目标转向角度驱动动力电动机。动力电动机控制单元可以计算反映车轮的输出角度的反馈转向角度,基于反馈转向角度和车辆速度计算用于可变地控制车轮的输出角度的补偿转向角度,并使用补偿转向
用于线控转向系统的转向控制方法和装置.pdf
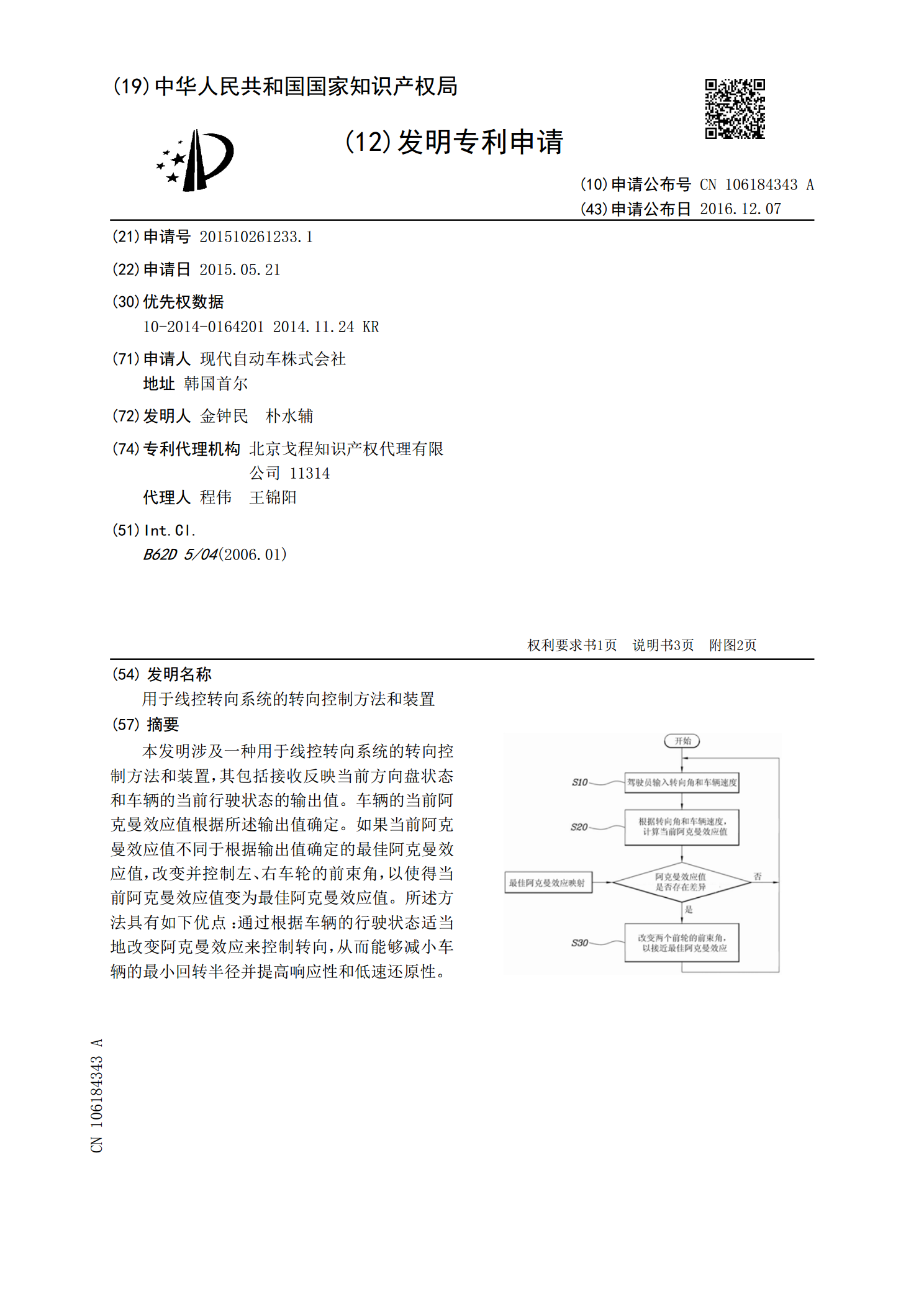
本发明涉及一种用于线控转向系统的转向控制方法和装置,其包括接收反映当前方向盘状态和车辆的当前行驶状态的输出值。车辆的当前阿克曼效应值根据所述输出值确定。如果当前阿克曼效应值不同于根据输出值确定的最佳阿克曼效应值,改变并控制左、右车轮的前束角,以使得当前阿克曼效应值变为最佳阿克曼效应值。所述方法具有如下优点:通过根据车辆的行驶状态适当地改变阿克曼效应来控制转向,从而能够减小车辆的最小回转半径并提高响应性和低速还原性。
线控转向系统和线控转向系统的控制方法.pdf
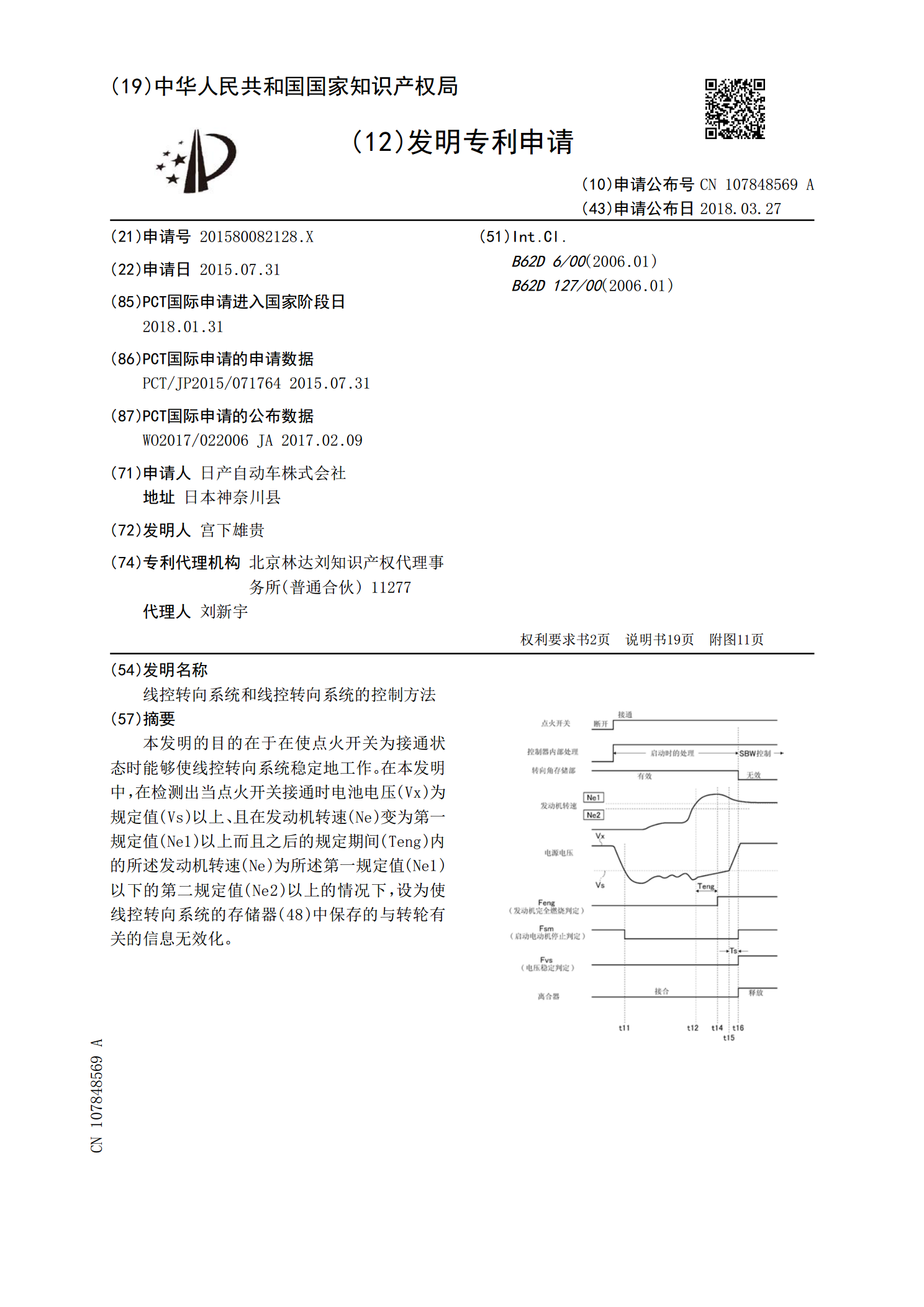
本发明的目的在于在使点火开关为接通状态时能够使线控转向系统稳定地工作。在本发明中,在检测出当点火开关接通时电池电压(Vx)为规定值(Vs)以上、且在发动机转速(Ne)变为第一规定值(Ne1)以上而且之后的规定期间(Teng)内的所述发动机转速(Ne)为所述第一规定值(Ne1)以下的第二规定值(Ne2)以上的情况下,设为使线控转向系统的存储器(48)中保存的与转轮有关的信息无效化。
基于线控转向系统的车辆转向模式控制方法和装置.pdf
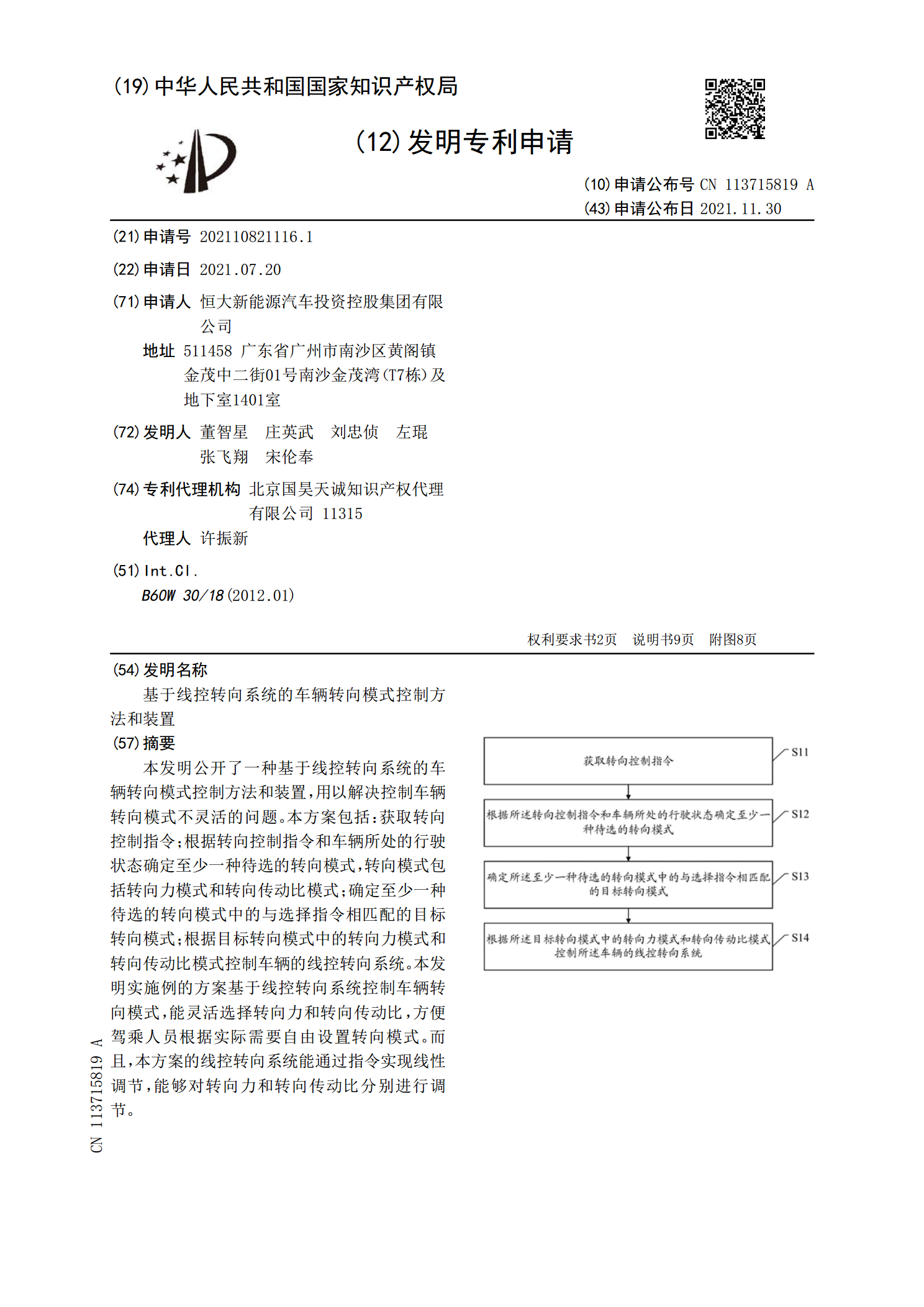
本发明公开了一种基于线控转向系统的车辆转向模式控制方法和装置,用以解决控制车辆转向模式不灵活的问题。本方案包括:获取转向控制指令;根据转向控制指令和车辆所处的行驶状态确定至少一种待选的转向模式,转向模式包括转向力模式和转向传动比模式;确定至少一种待选的转向模式中的与选择指令相匹配的目标转向模式;根据目标转向模式中的转向力模式和转向传动比模式控制车辆的线控转向系统。本发明实施例的方案基于线控转向系统控制车辆转向模式,能灵活选择转向力和转向传动比,方便驾乘人员根据实际需要自由设置转向模式。而且,本方案的线控转

控制线控转向的转向系统的方法和用于机动车辆的线控转向的转向系统.pdf
本发明涉及控制用于机动车辆的线控转向的转向系统(1)的方法,线控转向的转向系统(1)包括:可电控转向控制器(2),可电控转向控制器(2)作用于转向轮并且检测转向轮的实际转向角(α);反馈致动器,反馈致动器检测利用方向盘设置的目标转向角(β);以及致动单元(4),致动单元(4)根据目标转向角(β)和实际转向角(α)、使用受限扭矩请求信号(PT