
一种基于轮轨垂向力的车轮多边形识别方法及其装置.pdf

星星****眨眼

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于轮轨垂向力的车轮多边形识别方法及其装置.pdf
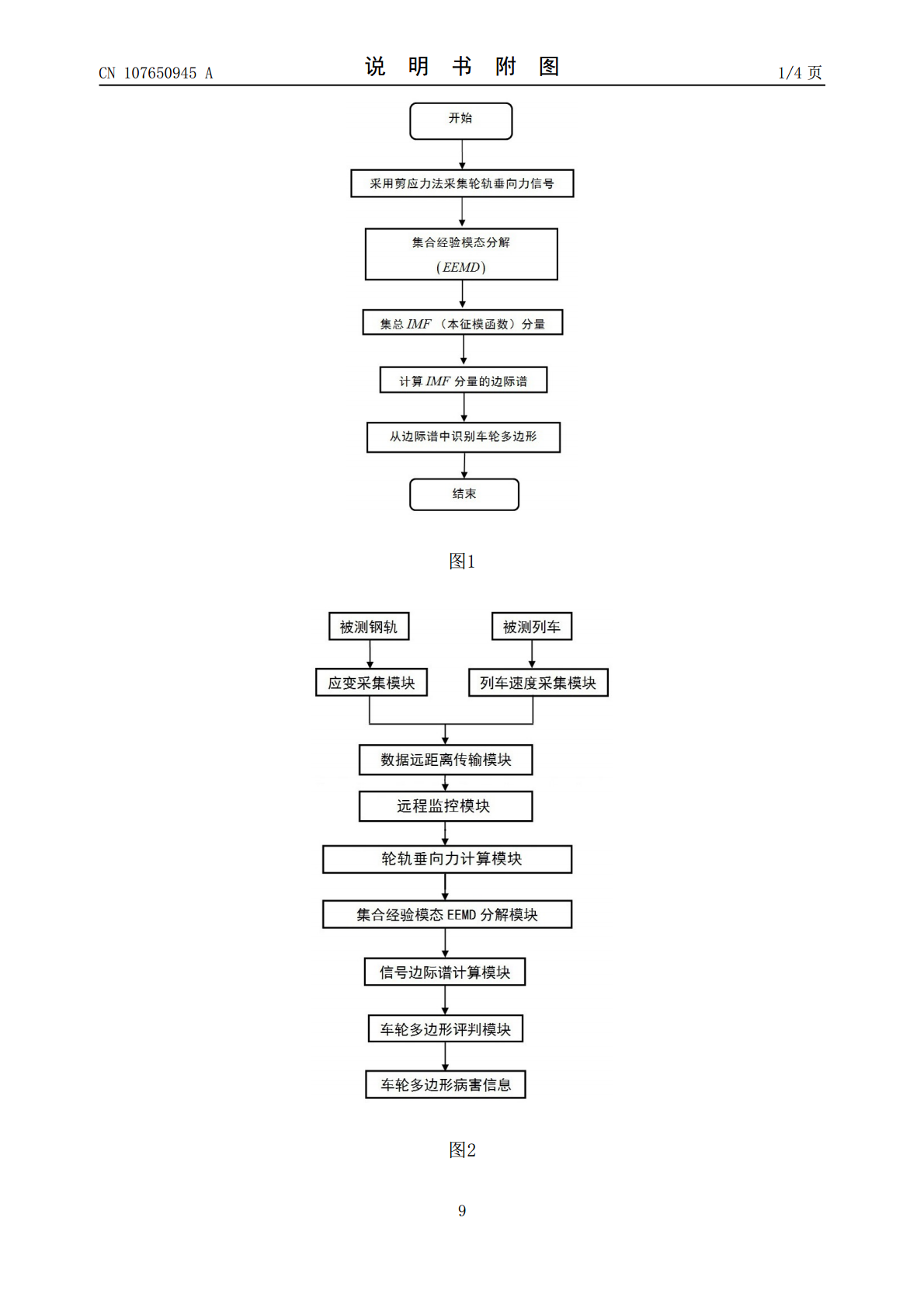
本发明公开了一种基于轮轨垂向力的车轮多边形识别方法及其装置,该识别方法包括以下步骤:以剪应力法采集轮轨垂向力信号;对所采集的轮轨垂向力信号进行集合经验模态EEMD分解,从而获取集总的本征模函数IMF分量;计算包含车轮多边形病害特征信息的本征模函数IMF的边际谱;根据获取的本征模函数IMF的边际谱,获得伤损特性频率f,并根据预设的判定准则,来识别车轮是否出现多边形以及多边形类型。其优点是:可对经过该监测路段的车辆进行实时监测和伤损评判,具有快速、精准的特点;EEMD方法能够很好的处理时变的轮轨垂向力信号,并
铁路垂向轮轨力标定装置、系统及其标定方法.pdf
本申请实施例公开了一种铁路垂向轮轨力标定装置、系统及其标定方法,所述装置包括具有前后方向的标定架主体,所述标定架主体的底板上设有两个或两个以上驱动轮;所述标定架主体的侧壁设有导向轮组件,所述导向轮组件包括导向轮、导向轮旋转轴和导向轮驱动件;所述标定架主体的侧壁还设有挂钩组件,所述挂钩组件包括挂钩本体和挂钩驱动件;所述标定架主体上还设有液压泵,所述液压泵包括液压驱动件和顶举头;所述标定架主体的底板上还设有激光测距仪,所述激光测距仪的发射方向与所述标定架主体的底板相垂。采用本申请实施例所提供的技术方案,铁路垂

垂向轮轨力连续测试方法.pdf
一种垂向轮轨力连续测试方法,其步骤是,一跨钢轨标出2个测点以及3个分段点位置;对测点、分段点的两侧轨腰粘贴应变片;对测点、分段点的应变片进行测试桥路组装,进行轮轨力应变的采集;从采集到的信号中找出三个分段点处测试电桥最大应变输出的时刻,然后分别取出测点处桥该时段的应变输出,拟合出两段标定曲线;然后根据应变值的大小及其对应的标定系数求出轮轨力数值。本发明的垂向轮轨力连续测试方法,一跨钢轨之内能够拟合出两条非常近似于线性的标定曲线,通过这两条标定曲线可求出采集到的轮轨力应变信号所有点的标定系数,从而求出这些点

基于钢轨支点压力的动车组轮轨垂向力测量方法.docx
基于钢轨支点压力的动车组轮轨垂向力测量方法Title:MeasurementMethodofVerticalWheel-RailForcesinHigh-SpeedTrainSetsBasedonRailBearingPressureAbstract:Inhigh-speedtrainoperations,thepropermanagementofwheel-railforcesiscrucialforensuringsafeandefficientrailwaytransportation.Thever

轮轨垂向载荷连续测量与识别方法研究的任务书.docx
轮轨垂向载荷连续测量与识别方法研究的任务书任务书1.研究背景近年来,随着铁路建设的不断扩张,轨道交通的安全问题越来越受到关注。其中,轮轨垂向载荷的测量与识别是保证轨道交通运行安全的重要手段之一。但是目前的测量方法存在精度不高、实时性不足等问题,无法满足实际需求。因此,深入研究轮轨垂向载荷连续测量与识别方法具有重要意义。2.研究目的本次研究的主要目的是探究轮轨垂向载荷连续测量与识别方法,提高其测量精度和实时性,保证轨道交通的安全性。同时,通过实验验证该方法的可行性和优越性,推动其在实际应用中的推广和应用。3