
车体行动控制装置以及车体行动的控制方法.pdf

子安****吖吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车体行动控制装置以及车体行动的控制方法.pdf
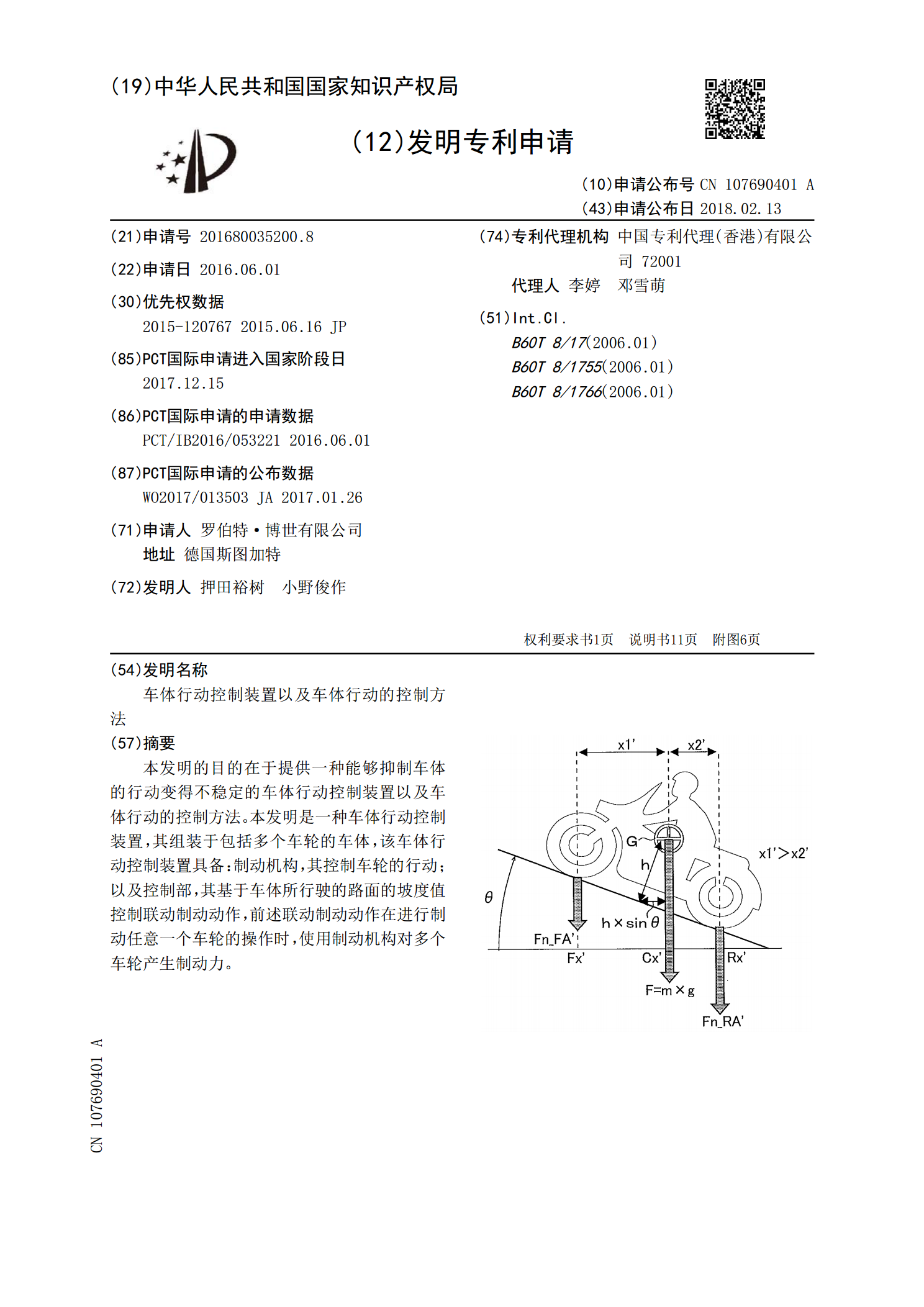
本发明的目的在于提供一种能够抑制车体的行动变得不稳定的车体行动控制装置以及车体行动的控制方法。本发明是一种车体行动控制装置,其组装于包括多个车轮的车体,该车体行动控制装置具备:制动机构,其控制车轮的行动;以及控制部,其基于车体所行驶的路面的坡度值控制联动制动动作,前述联动制动动作在进行制动任意一个车轮的操作时,使用制动机构对多个车轮产生制动力。

车体振动控制装置以及车体振动控制方法.pdf
本发明提供一种车体振动控制装置以及车体振动控制方法,本发明的目的在于能够在进行转向操作时对侧倾运动的增大进行抑制。计算对构成车体底盘运动的成分中源自驱动扭矩Tw的成分的变动进行抑制的驱动扭矩,使计算出的驱动扭矩与增益K1相乘,K1>0。另外,计算对源自上下力Fzf、Fzr的成分的变动进行抑制的驱动扭矩,使计算出的驱动扭矩与增益K2相乘,K2>0。并且,计算对作为源自转弯阻力Fcf、Fcr的成分的前轮负荷的变动进行抑制的驱动扭矩,使计算出的驱动扭矩与增益K3相乘,K3<0。由此,使其成为助长前轮负荷的变动的

车体振动控制装置以及车体振动控制方法.pdf
本发明提供一种车体振动控制装置以及车体振动控制方法,本发明的目的在于抑制轮负荷的变动的同时使转向响应性的提高和侧倾运动抑制成为可能。计算对构成车体底盘运动的成分中源自驱动扭矩Tw的成分的变动进行抑制的驱动扭矩,使计算出的驱动扭矩与增益K1相乘,K1>0。另外,计算对源自上下力Fzf、Fzr的成分的变动进行抑制的驱动扭矩,使计算出的驱动扭矩与增益K2相乘,K2>0。并且,计算对源自转弯阻力Fcf、Fcr的成分的变动进行抑制的驱动扭矩,使计算出的驱动扭矩与增益K3相乘,K3<0。由此,使其成为助长该变动的方向

车体振动估计装置以及使用它的车体减振控制装置.pdf
由运算部(31、32)对平均前轮速度VwF=(VwFL+VwFR)/2和平均后轮速度VwR=(VwRL+VwRR)/2进行运算,使上述VwF、VwR通过带通滤波处理部(33、34)来仅抽取出车体谐振频率附近的成分,获取表示车体振动的前轮速度(VwF)的车体谐振频率附近振动成分和后轮速度(VwR)的车体谐振频率附近振动成分(fVwR)。在运算部(35、36)中,根据fVwF、fVwR求出表示车体振动的前轮的前后方向位移(Xtf)和后轮的前后方向位移(Xt?r),基于由悬架几何所决定的前轮和后轮的前后位移与上

车体姿态控制装置.pdf
一种车体姿态控制装置,其能够改善车辆行驶时的转弯操作性、操纵稳定、驾驶感受。为了在车辆转弯行驶时使俯仰率与侧倾率成比例关系,控制器(13)包括:增益(16)、判断部(17)、乘运算部(18)、FF控制部(19)、差运算部(20)、FB控制部(21)、平均值运算部(22)、目标阻尼力运算部(23)、减振器指令值计算部(24)。求出与侧倾率成比例的目标俯仰率,使设置在左右前轮(2)侧与左右后轮(3)侧的阻尼力可变减振器(6、9)的阻尼力特性达到该目标俯仰率而进行可变控制,对车体施加俯仰力矩。