
一种激光导引AGV自然导航定位方法.pdf

一吃****春艳


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光导引AGV自然导航定位方法.pdf
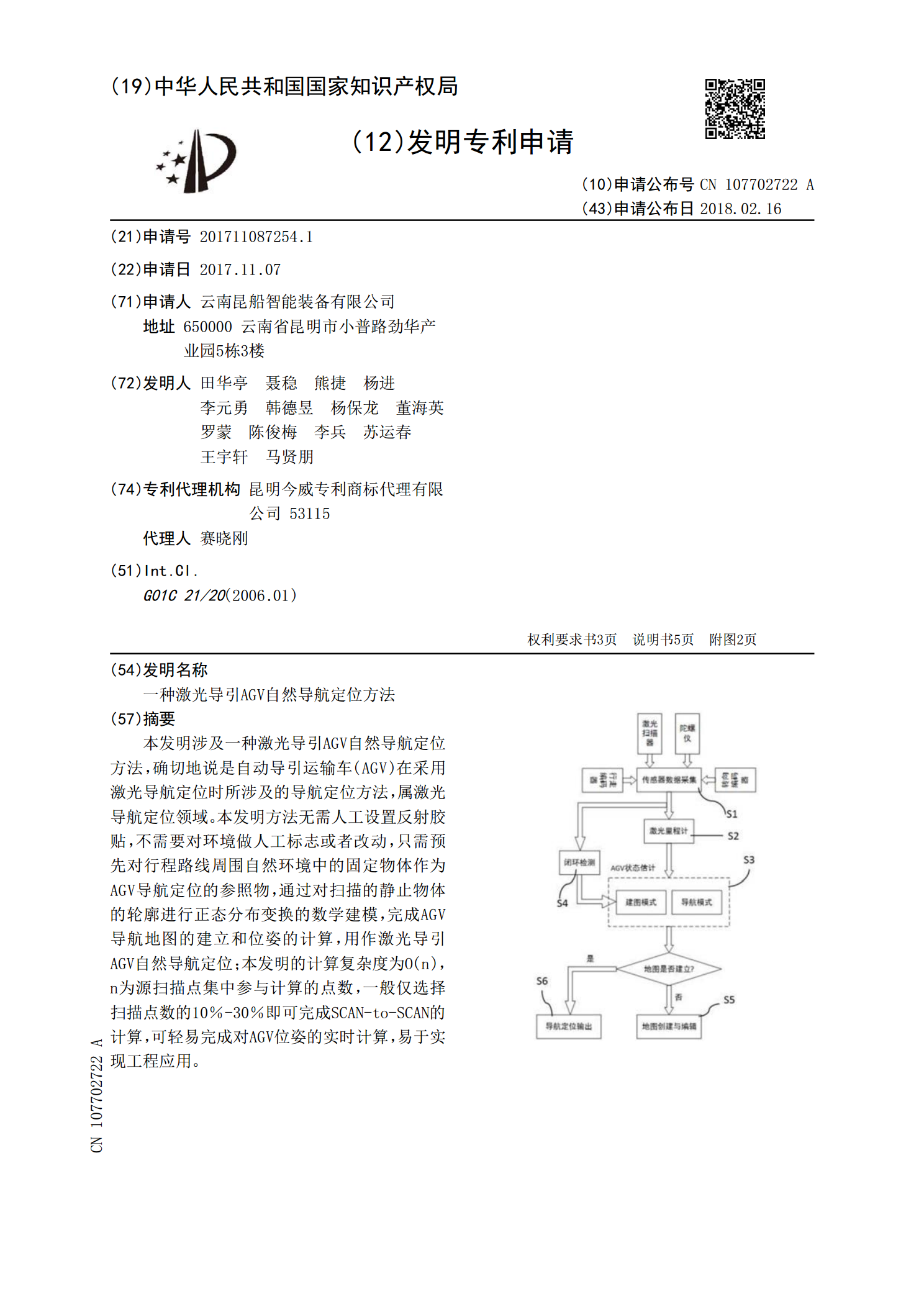
本发明涉及一种激光导引AGV自然导航定位方法,确切地说是自动导引运输车(AGV)在采用激光导航定位时所涉及的导航定位方法,属激光导航定位领域。本发明方法无需人工设置反射胶贴,不需要对环境做人工标志或者改动,只需预先对行程路线周围自然环境中的固定物体作为AGV导航定位的参照物,通过对扫描的静止物体的轮廓进行正态分布变换的数学建模,完成AGV导航地图的建立和位姿的计算,用作激光导引AGV自然导航定位;本发明的计算复杂度为O(n),n为源扫描点集中参与计算的点数,一般仅选择扫描点数的10%‑30%即可完成SCA

一种激光导引的SD型AGV系统的导引方法.pdf
本发明提供了一种激光导引的SD型AGV系统的导引方法,属于AGV系统技术领域。它解决了现有技术中由于算法结构关系,需要采用大量的迭代运算,处理周期较长,对处理器的运算能力要求较高的问题。本方法包括直线型和弯道型导引控制方式,把AGV系统的运动看成一个质点即参考点,主要步骤如下:(1)确定参考点与目标路径的偏差值CD;(2)采用分段式PI调整方式计算得到控制转角值,根据偏差值的具体数值通过查表格得到当前对应的调整参数P和I因子的具体数值,通过参数运算得到车轮的控制转角值;(3)完成周期导引控制。本方法通过简

一种基于二维码的激光导航AGV高精度定位方法.pdf
本发明涉及智能移动机器人技术领域,尤其是涉及一种基于二维码的激光导航AGV高精度定位方法,该方法在AGV车体上安装二维码相机,通过在激光导航终点附近,距离料架一段固定距离的地面贴制二维码标签,AGV到达激光导航终点,二维码相机读到二维码后,进入二次定位环节,精准获取AGV在二维码坐标下的位姿偏差,规划出一条可行路径,然后通过PID算法跟踪路径,利用两轮差速运动模型计算出左右轮的速度,AGV跟随路径行驶,实时纠偏AGV与路径之间的偏差,最后准确到达指定位置。相较于现有技术,本发明实现了从激光导航到二维码导航

一种具有高精度导航定位功能的AGV平台及导航方法.pdf
本发明提供了一种环境适应力强、能有效避免误报错的具有高精度导航定位功能的AGV平台,以及基于该平台的导航方法。AGV平台包括含有四驱舵轮的车体(1),在车体的底面的中线上的不同位置设置有第一视觉相机(2)和第二视觉相机(3),该中线的走向与车体的前进方向一致,在车体的底面的另一条中线上且偏离车体的中心点还设置有第三视觉相机(4),在车体的底面中心点处设置有RFID读卡器(5)。其导航方法为:当该AGV平台前进时,第一视觉相机和第二视觉相机对前进路径进行俯拍,RFID读卡器不断扫描路径上标记的RFID信息,

一种AGV室内仓储物流导航定位系统和定位方法.pdf
本发明公开了一种AGV室内仓储物流导航定位系统和定位方法,该系统包括设置在AGV上的激光雷达、UWB定位标签模块、RFID识别器模块、主控模块和工控机,固定在室内环境中的微型天线、若干个UWB定位基站和设置在货架上的若干个RFID标签,以及与工控机通信连接的上位机;用该系统进行定位,UWB测距精度高,工作稳定可靠,具有优异的抗多径性能,对环境适应性好,可以有效地弥补激光技术的不足,在激光雷达迷航的时候为采用激光雷达进行导航的AGV提供辅助定位导航服务。RFID在实际应用中具有成本低、精度高等优势,可以作为