
一种激光导引的SD型AGV系统的导引方法.pdf

猫巷****熙柔


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种激光导引的SD型AGV系统的导引方法.pdf
本发明提供了一种激光导引的SD型AGV系统的导引方法,属于AGV系统技术领域。它解决了现有技术中由于算法结构关系,需要采用大量的迭代运算,处理周期较长,对处理器的运算能力要求较高的问题。本方法包括直线型和弯道型导引控制方式,把AGV系统的运动看成一个质点即参考点,主要步骤如下:(1)确定参考点与目标路径的偏差值CD;(2)采用分段式PI调整方式计算得到控制转角值,根据偏差值的具体数值通过查表格得到当前对应的调整参数P和I因子的具体数值,通过参数运算得到车轮的控制转角值;(3)完成周期导引控制。本方法通过简

浅谈激光导引AGV系统原理与应用.docx
浅谈激光导引AGV系统原理与应用激光导引AGV系统原理与应用激光导引AGV系统是一种基于激光导航的自动引导车辆系统,可以实现自动驾驶,智能运输货物,是现代物流行业中不可或缺的一部分。它可以实现对物流场景中的自动运动控制,提高企业物理流程的精确性和效率,为企业节约人力成本,提高生产效率,而在工业物流领域有着广泛的应用。一、系统原理激光导引AGV系统是基于激光导航技术进行设计和实现的,主要包括两部分,激光导航器和激光导引AGV车辆。(一)激光导航器:激光导航器是激光导引AGV系统的核心部件之一,它通过激光传感
一种激光导引AGV自然导航定位方法.pdf
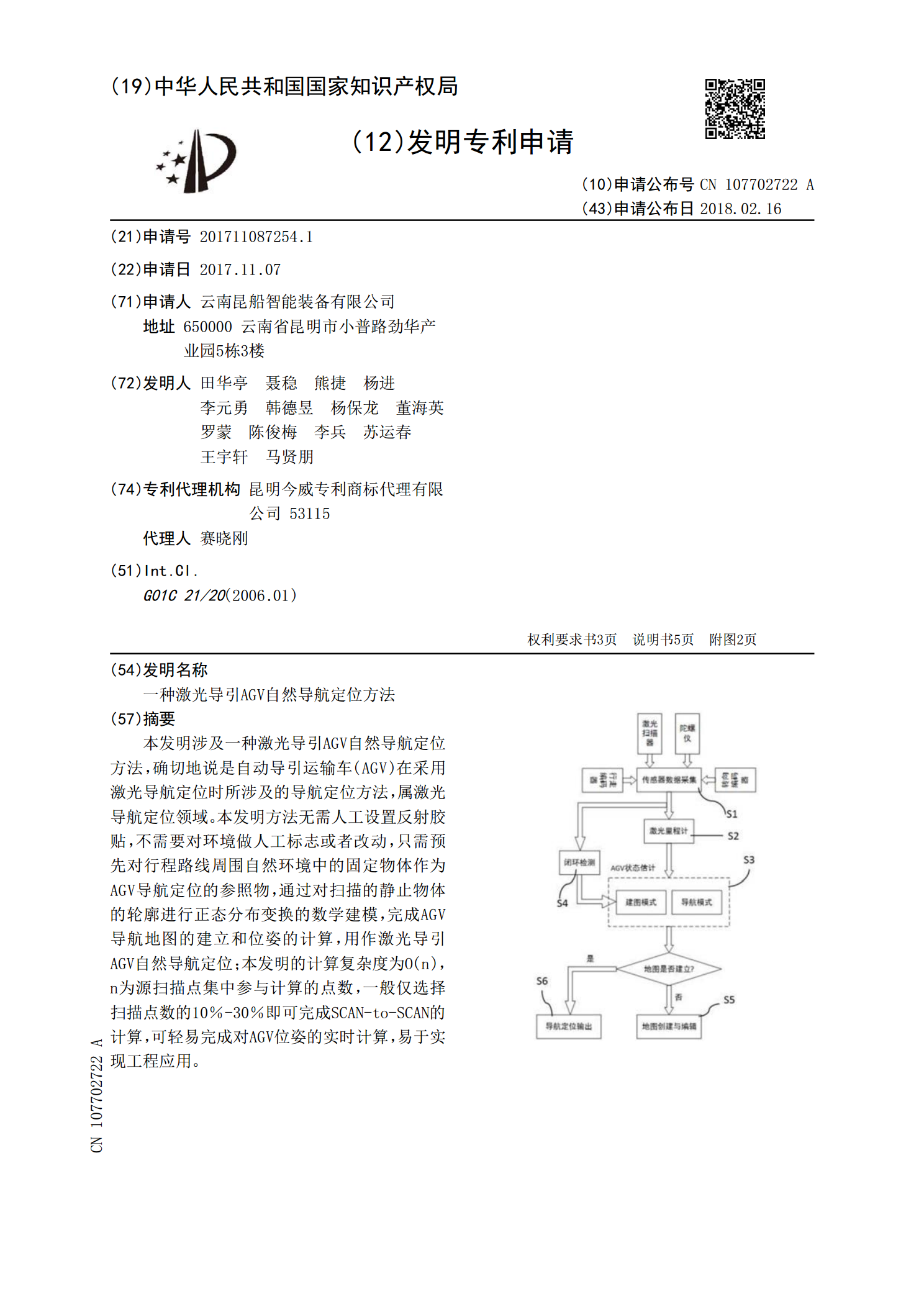
本发明涉及一种激光导引AGV自然导航定位方法,确切地说是自动导引运输车(AGV)在采用激光导航定位时所涉及的导航定位方法,属激光导航定位领域。本发明方法无需人工设置反射胶贴,不需要对环境做人工标志或者改动,只需预先对行程路线周围自然环境中的固定物体作为AGV导航定位的参照物,通过对扫描的静止物体的轮廓进行正态分布变换的数学建模,完成AGV导航地图的建立和位姿的计算,用作激光导引AGV自然导航定位;本发明的计算复杂度为O(n),n为源扫描点集中参与计算的点数,一般仅选择扫描点数的10%‑30%即可完成SCA

实验型AGV控制与导引系统研究与开发.pptx
汇报人:目录PARTONEPARTTWOAGV的定义和功能AGV系统的组成和原理AGV的应用和发展趋势PARTTHREE实验型AGV控制系统的需求分析实验型AGV控制系统的总体设计实验型AGV控制系统的硬件实现实验型AGV控制系统的软件实现PARTFOUR实验型AGV导引系统的需求分析实验型AGV导引系统的总体设计实验型AGV导引系统的路径规划实验型AGV导引系统的导航精度和稳定性分析PARTFIVE实验型AGV控制与导引系统的测试平台搭建实验型AGV控制与导引系统的性能测试实验型AGV控制与导引系统的实

激光导引AGV样机研制的任务书.docx
激光导引AGV样机研制的任务书任务书一、项目背景自动导引车(AGV)是一种智能化的机器人车辆,能够在工业制造流程中自动驾驶,进行物料的搬运,是现代工业生产中的重要设备。在许多领域中,AGV具有重要应用价值,特别是在工厂等环境中,它能够非常灵活地响应变化,并且具有高效性和准确性。激光导引AGV是一种非常新颖的AGV,能够通过激光引导来实现自动导航,具有较高的精度和稳定性。本项目旨在研发一种激光导引AGV样机,以此为基础,进一步探索激光导引AGV技术应用的可行性,以满足工业生产流程中物料搬运的需求。二、任务要