
一种具有高精度导航定位功能的AGV平台及导航方法.pdf

努力****南绿


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有高精度导航定位功能的AGV平台及导航方法.pdf
本发明提供了一种环境适应力强、能有效避免误报错的具有高精度导航定位功能的AGV平台,以及基于该平台的导航方法。AGV平台包括含有四驱舵轮的车体(1),在车体的底面的中线上的不同位置设置有第一视觉相机(2)和第二视觉相机(3),该中线的走向与车体的前进方向一致,在车体的底面的另一条中线上且偏离车体的中心点还设置有第三视觉相机(4),在车体的底面中心点处设置有RFID读卡器(5)。其导航方法为:当该AGV平台前进时,第一视觉相机和第二视觉相机对前进路径进行俯拍,RFID读卡器不断扫描路径上标记的RFID信息,

一种基于二维码的激光导航AGV高精度定位方法.pdf
本发明涉及智能移动机器人技术领域,尤其是涉及一种基于二维码的激光导航AGV高精度定位方法,该方法在AGV车体上安装二维码相机,通过在激光导航终点附近,距离料架一段固定距离的地面贴制二维码标签,AGV到达激光导航终点,二维码相机读到二维码后,进入二次定位环节,精准获取AGV在二维码坐标下的位姿偏差,规划出一条可行路径,然后通过PID算法跟踪路径,利用两轮差速运动模型计算出左右轮的速度,AGV跟随路径行驶,实时纠偏AGV与路径之间的偏差,最后准确到达指定位置。相较于现有技术,本发明实现了从激光导航到二维码导航
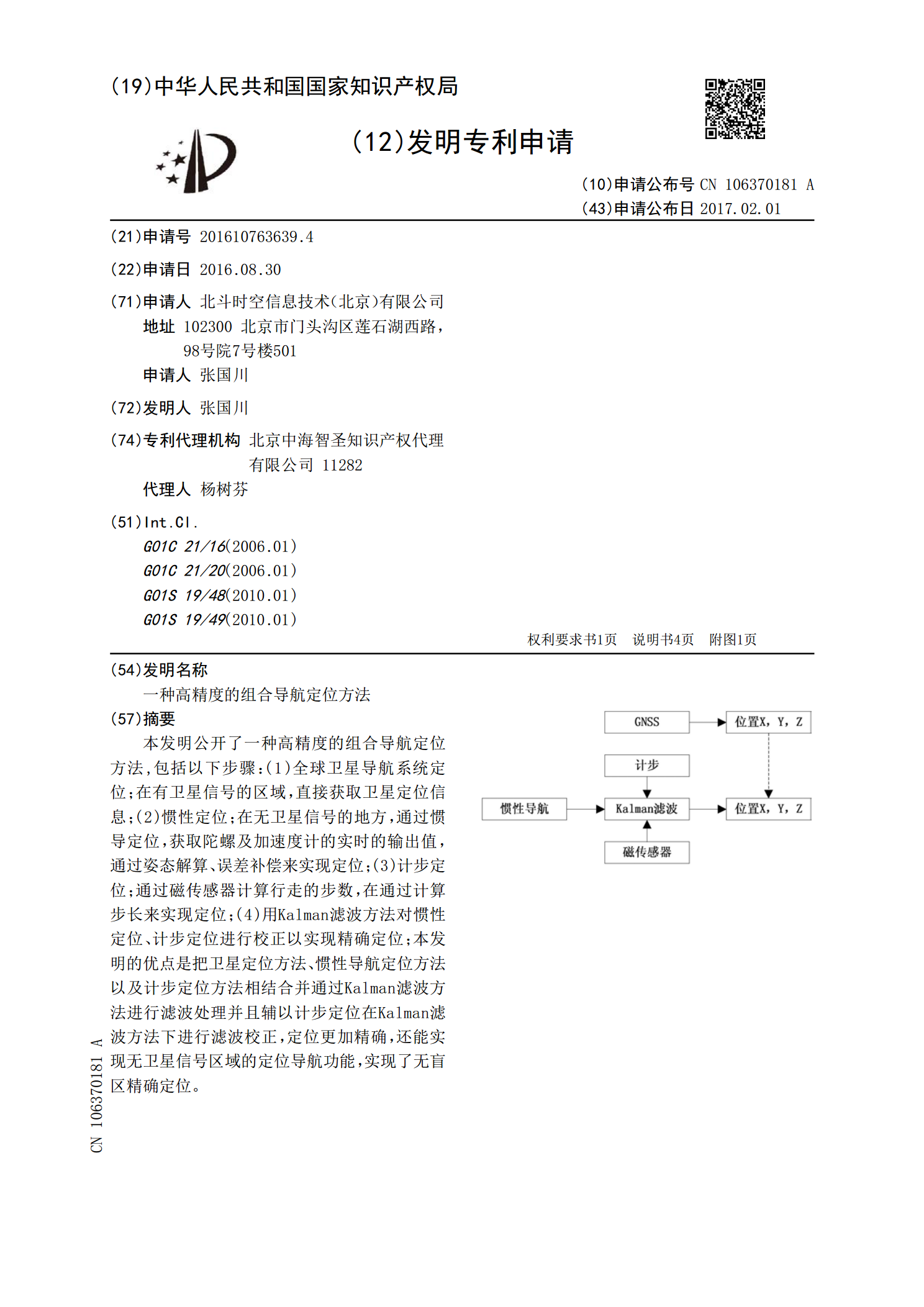
一种高精度的组合导航定位方法.pdf
本发明公开了一种高精度的组合导航定位方法,包括以下步骤:(1)全球卫星导航系统定位;在有卫星信号的区域,直接获取卫星定位信息;(2)惯性定位;在无卫星信号的地方,通过惯导定位,获取陀螺及加速度计的实时的输出值,通过姿态解算、误差补偿来实现定位;(3)计步定位;通过磁传感器计算行走的步数,在通过计算步长来实现定位;(4)用Kalman滤波方法对惯性定位、计步定位进行校正以实现精确定位;本发明的优点是把卫星定位方法、惯性导航定位方法以及计步定位方法相结合并通过Kalman滤波方法进行滤波处理并且辅以计步定位在
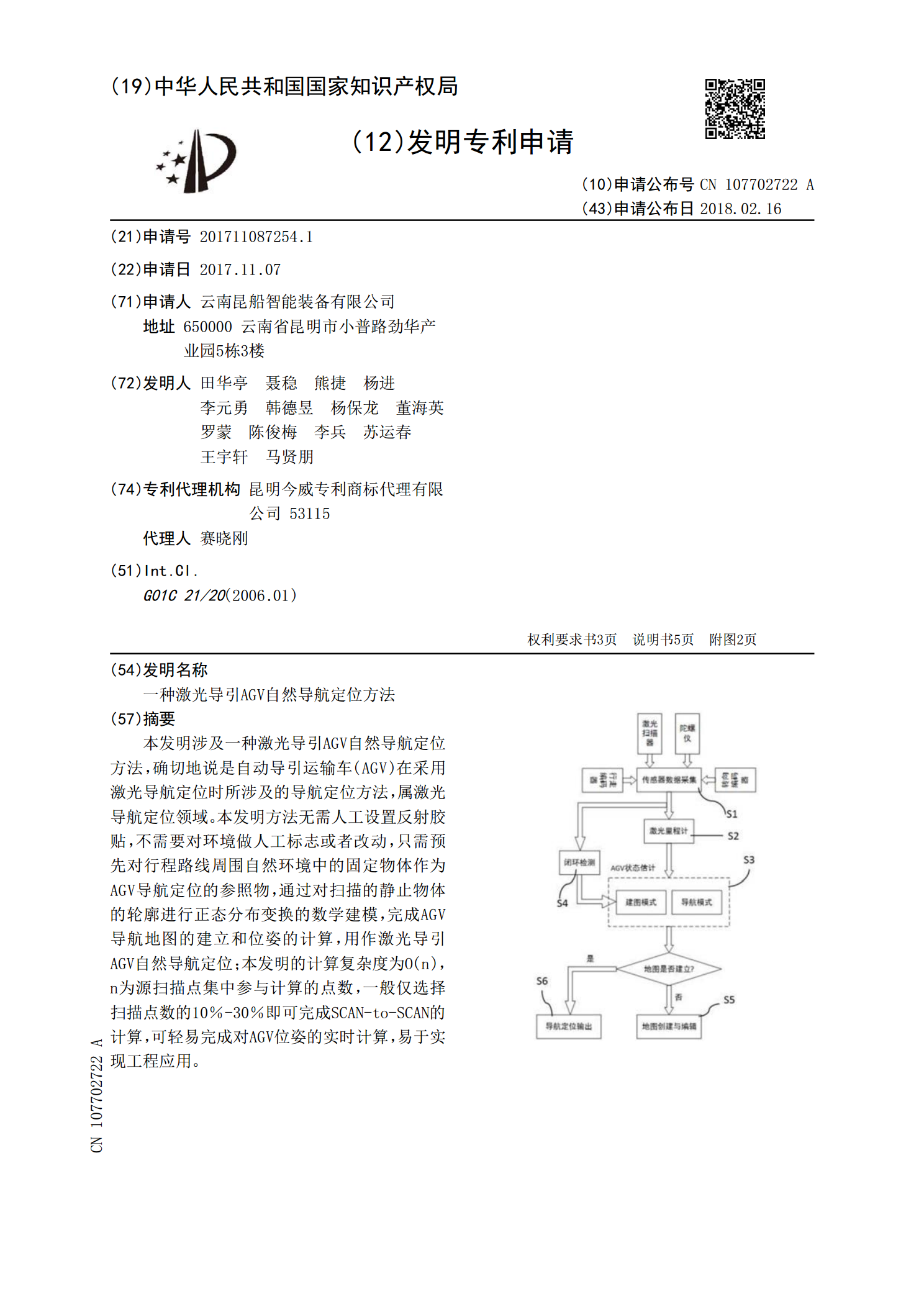
一种激光导引AGV自然导航定位方法.pdf
本发明涉及一种激光导引AGV自然导航定位方法,确切地说是自动导引运输车(AGV)在采用激光导航定位时所涉及的导航定位方法,属激光导航定位领域。本发明方法无需人工设置反射胶贴,不需要对环境做人工标志或者改动,只需预先对行程路线周围自然环境中的固定物体作为AGV导航定位的参照物,通过对扫描的静止物体的轮廓进行正态分布变换的数学建模,完成AGV导航地图的建立和位姿的计算,用作激光导引AGV自然导航定位;本发明的计算复杂度为O(n),n为源扫描点集中参与计算的点数,一般仅选择扫描点数的10%‑30%即可完成SCA
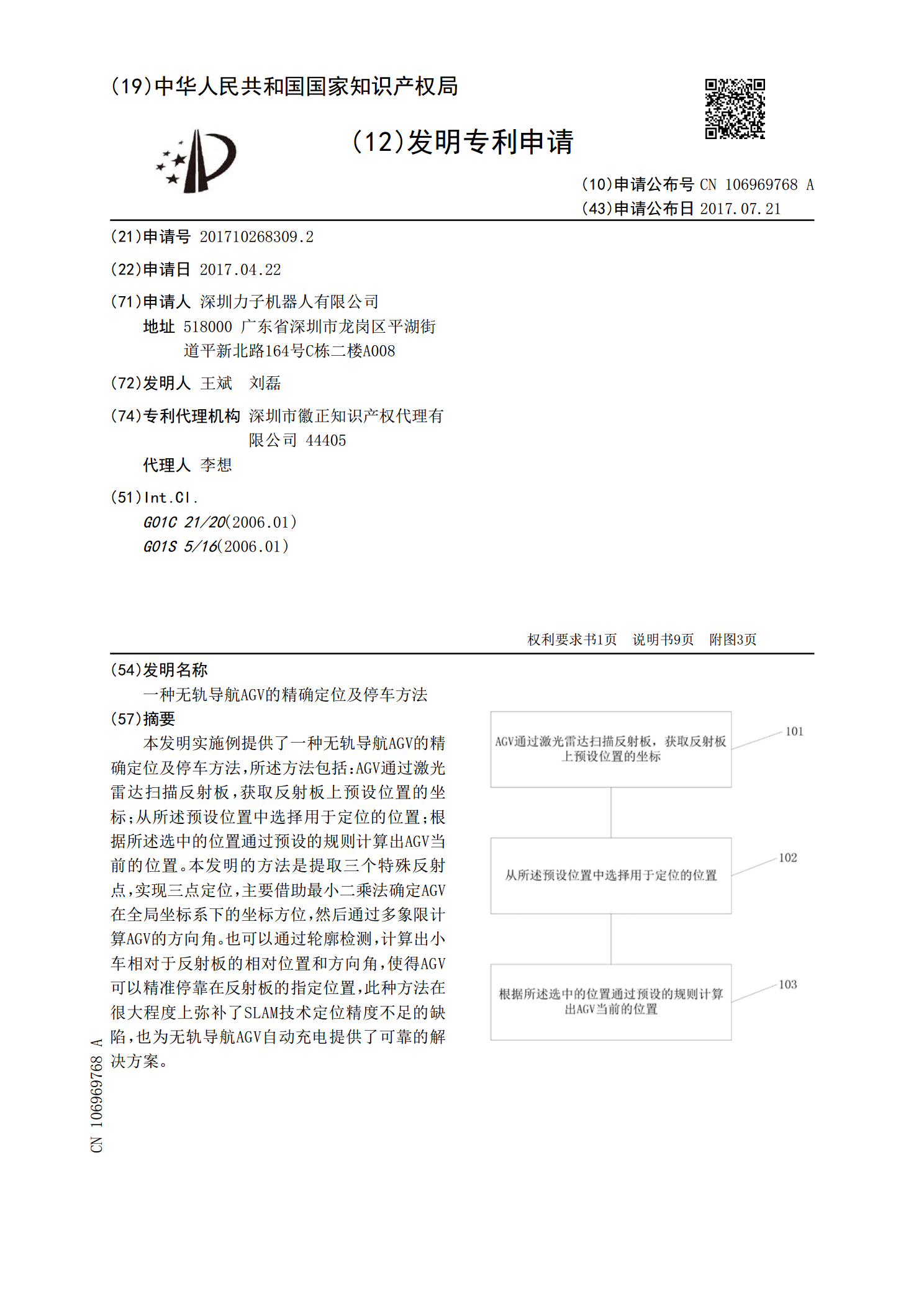
一种无轨导航AGV的精确定位及停车方法.pdf
本发明实施例提供了一种无轨导航AGV的精确定位及停车方法,所述方法包括:AGV通过激光雷达扫描反射板,获取反射板上预设位置的坐标;从所述预设位置中选择用于定位的位置;根据所述选中的位置通过预设的规则计算出AGV当前的位置。本发明的方法是提取三个特殊反射点,实现三点定位,主要借助最小二乘法确定AGV在全局坐标系下的坐标方位,然后通过多象限计算AGV的方向角。也可以通过轮廓检测,计算出小车相对于反射板的相对位置和方向角,使得AGV可以精准停靠在反射板的指定位置,此种方法在很大程度上弥补了SLAM技术定位精度不