
车辆过坎补偿控制方法、装置、系统和电机控制器.pdf

星星****眨眼

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆过坎补偿控制方法、装置、系统和电机控制器.pdf
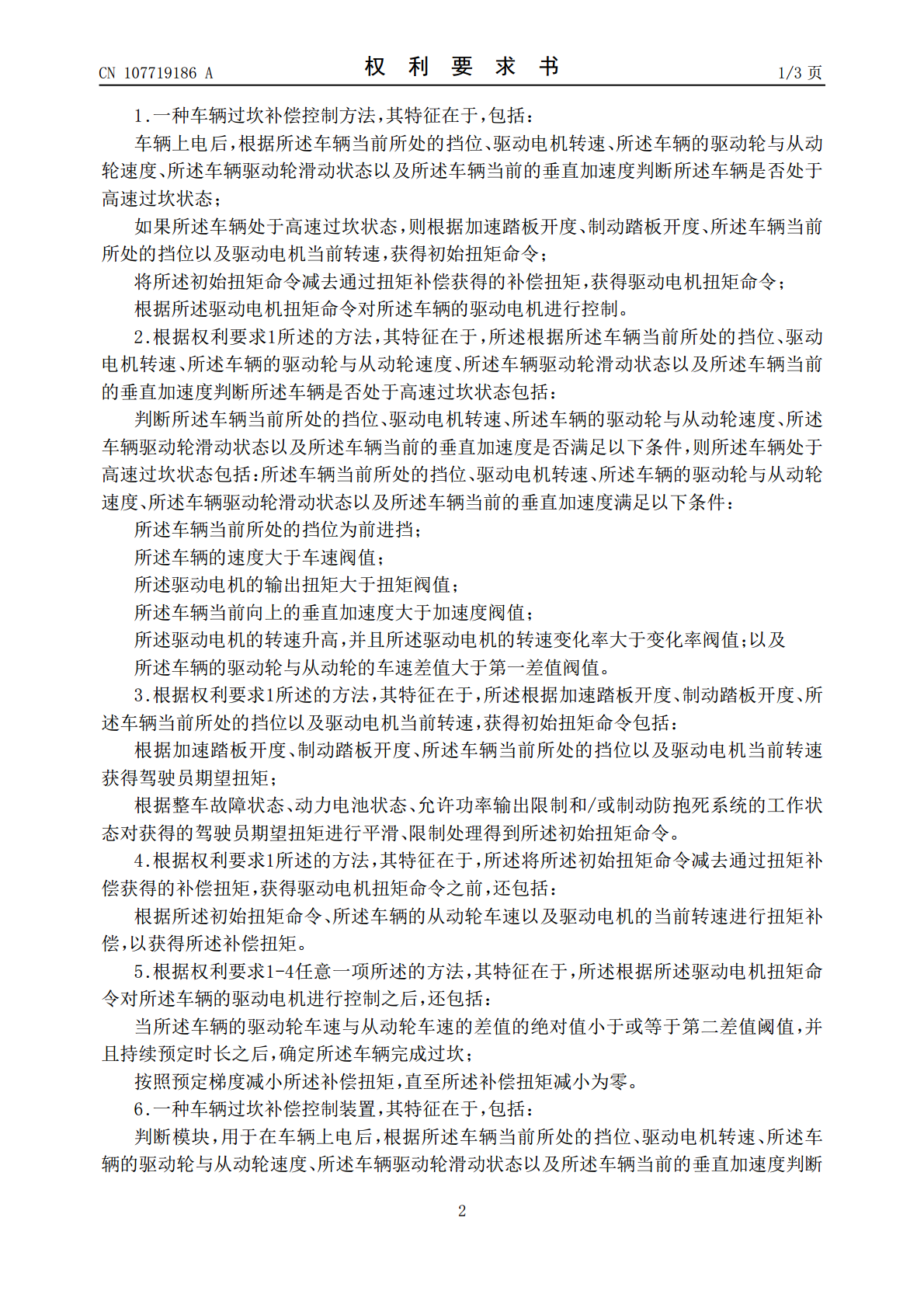
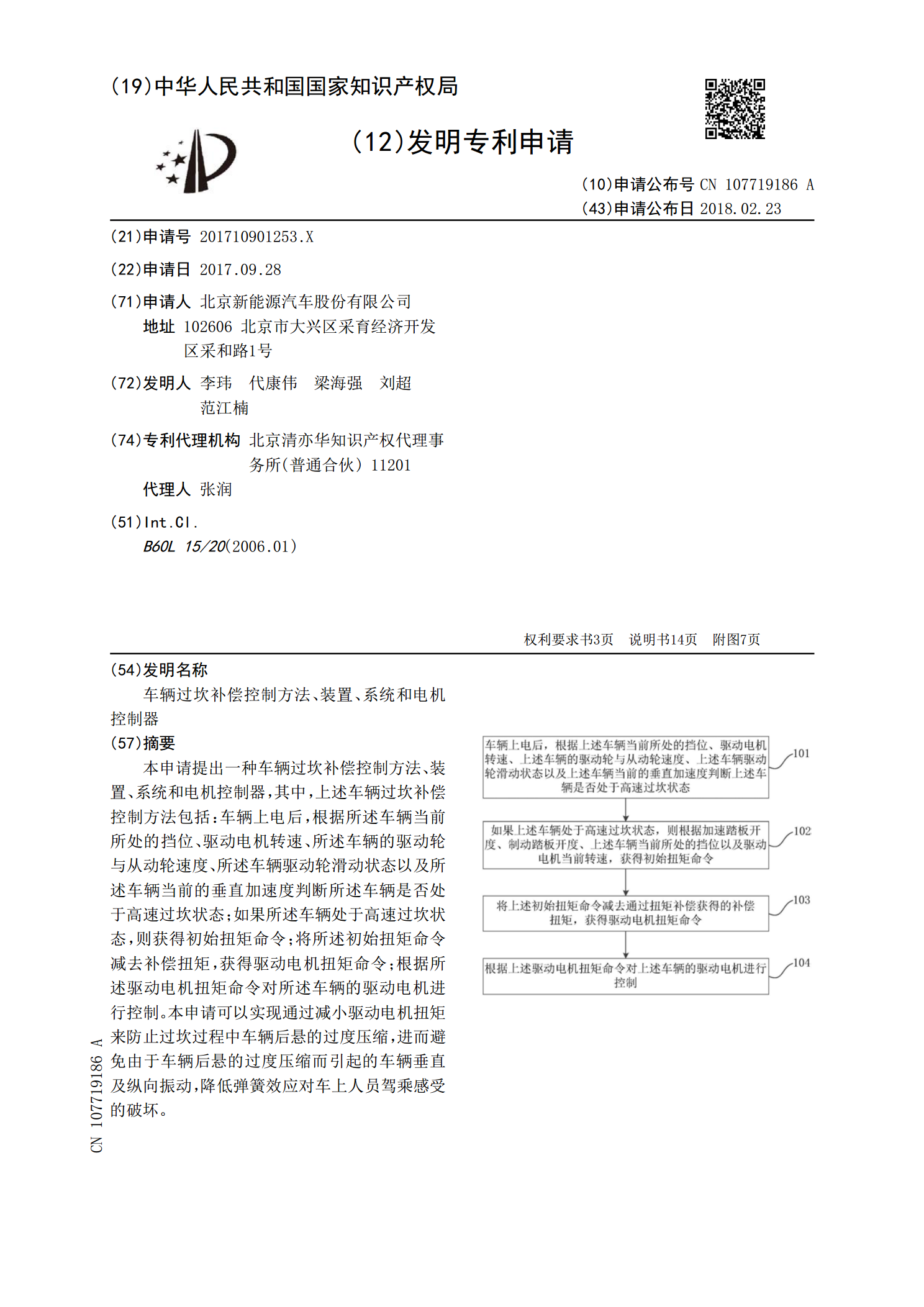
本申请提出一种车辆过坎补偿控制方法、装置、系统和电机控制器,其中,上述车辆过坎补偿控制方法包括:车辆上电后,根据所述车辆当前所处的挡位、驱动电机转速、所述车辆的驱动轮与从动轮速度、所述车辆驱动轮滑动状态以及所述车辆当前的垂直加速度判断所述车辆是否处于高速过坎状态;如果所述车辆处于高速过坎状态,则获得初始扭矩命令;将所述初始扭矩命令减去补偿扭矩,获得驱动电机扭矩命令;根据所述驱动电机扭矩命令对所述车辆的驱动电机进行控制。本申请可以实现通过减小驱动电机扭矩来防止过坎过程中车辆后悬的过度压缩,进而避免由于车辆后
电机控制器的死区补偿方法、装置及车辆.pdf
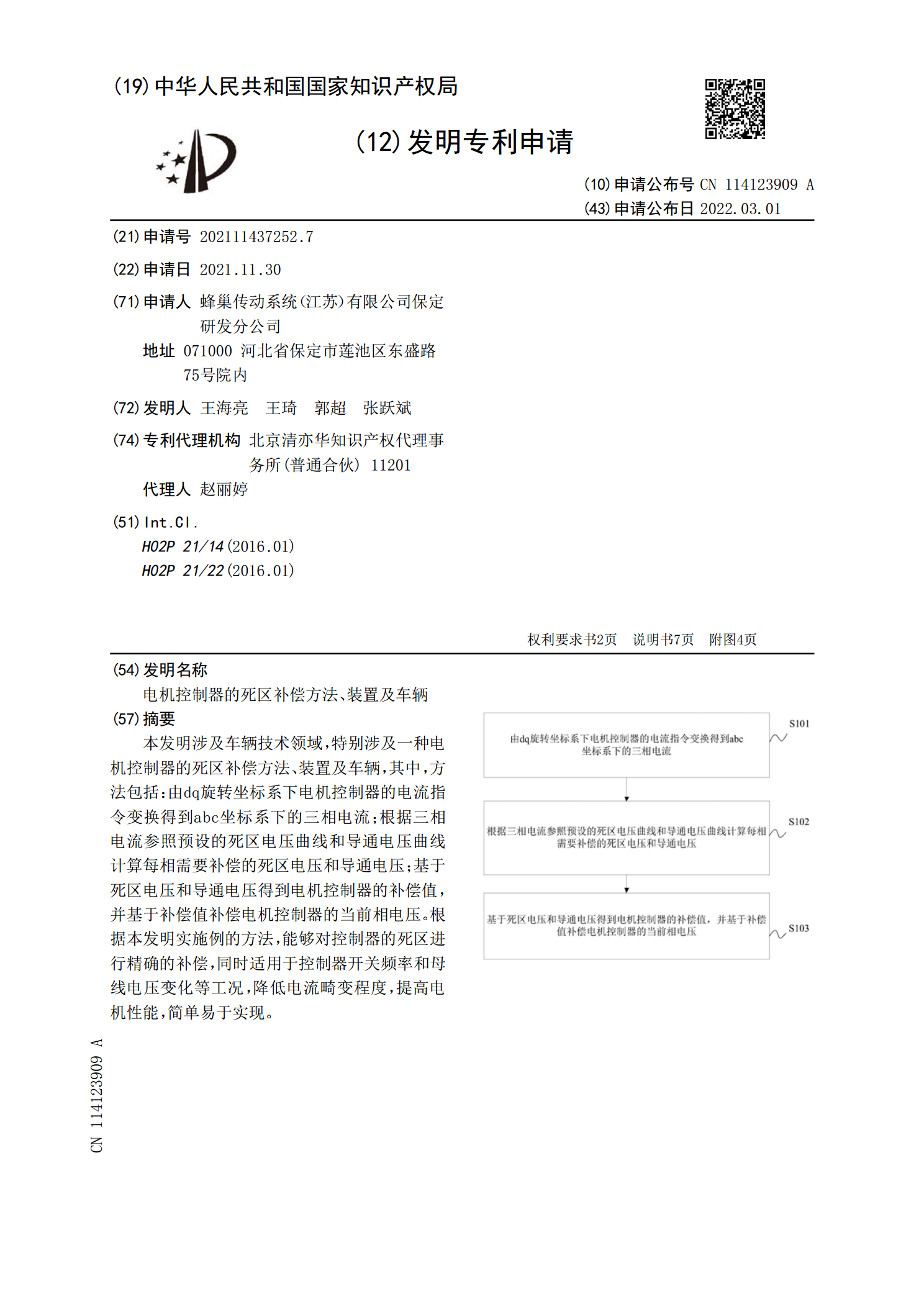
本发明涉及车辆技术领域,特别涉及一种电机控制器的死区补偿方法、装置及车辆,其中,方法包括:由dq旋转坐标系下电机控制器的电流指令变换得到abc坐标系下的三相电流;根据三相电流参照预设的死区电压曲线和导通电压曲线计算每相需要补偿的死区电压和导通电压;基于死区电压和导通电压得到电机控制器的补偿值,并基于补偿值补偿电机控制器的当前相电压。根据本发明实施例的方法,能够对控制器的死区进行精确的补偿,同时适用于控制器开关频率和母线电压变化等工况,降低电流畸变程度,提高电机性能,简单易于实现。
电机控制器及其控制方法和控制装置、车辆.pdf
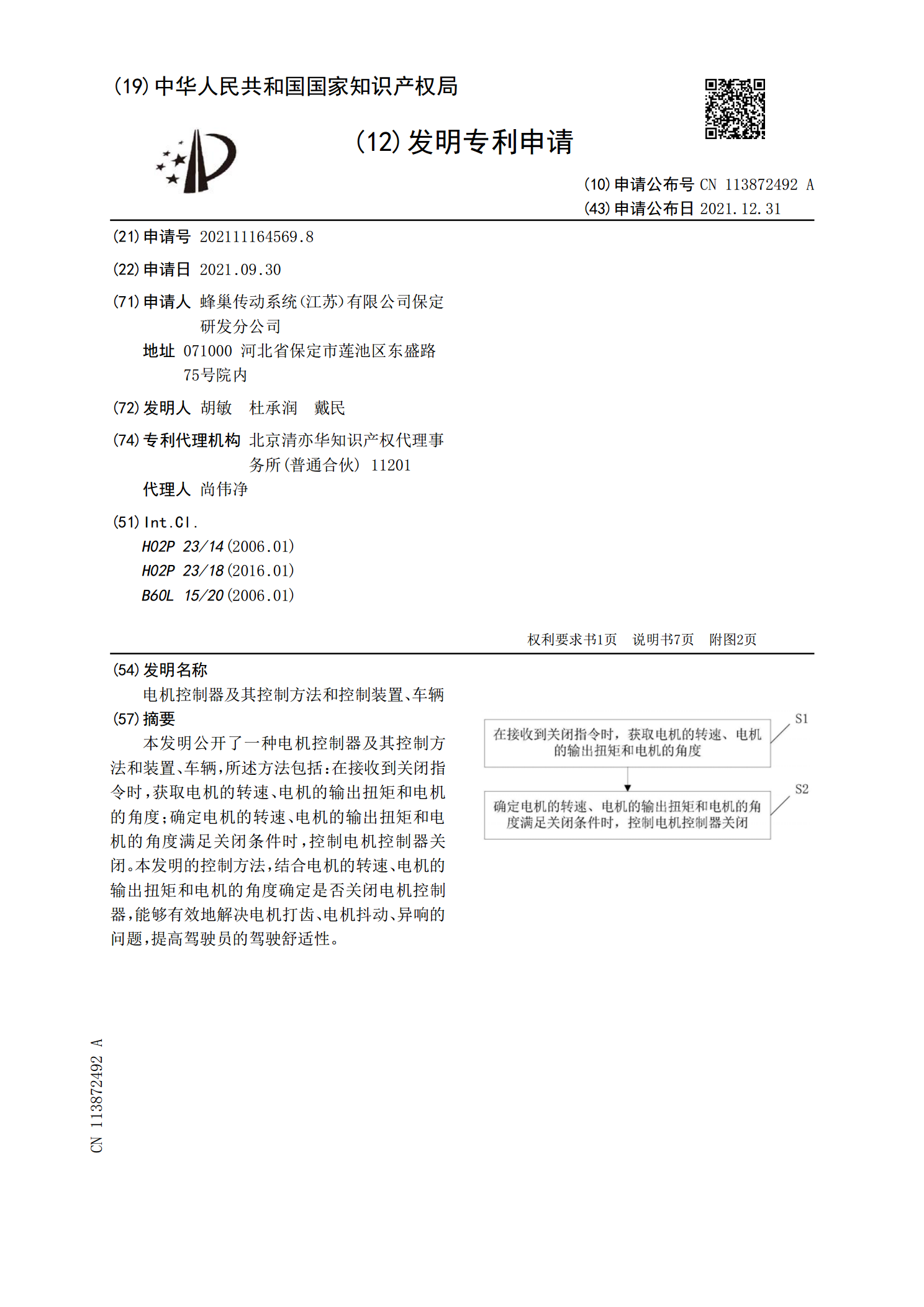
本发明公开了一种电机控制器及其控制方法和装置、车辆,所述方法包括:在接收到关闭指令时,获取电机的转速、电机的输出扭矩和电机的角度;确定电机的转速、电机的输出扭矩和电机的角度满足关闭条件时,控制电机控制器关闭。本发明的控制方法,结合电机的转速、电机的输出扭矩和电机的角度确定是否关闭电机控制器,能够有效地解决电机打齿、电机抖动、异响的问题,提高驾驶员的驾驶舒适性。
转矩补偿控制方法和装置以及EPS系统和车辆.pdf
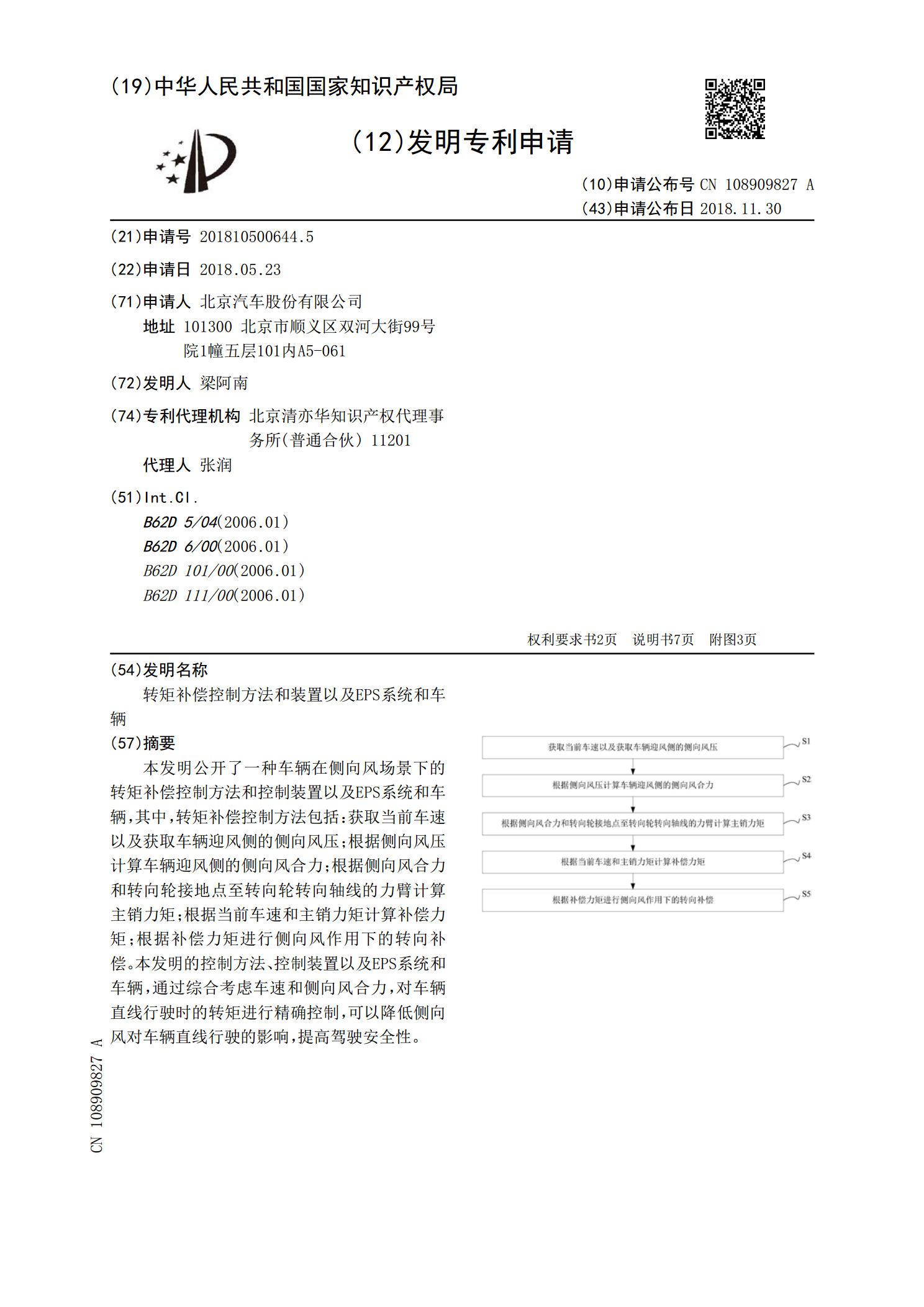
本发明公开了一种车辆在侧向风场景下的转矩补偿控制方法和控制装置以及EPS系统和车辆,其中,转矩补偿控制方法包括:获取当前车速以及获取车辆迎风侧的侧向风压;根据侧向风压计算车辆迎风侧的侧向风合力;根据侧向风合力和转向轮接地点至转向轮转向轴线的力臂计算主销力矩;根据当前车速和主销力矩计算补偿力矩;根据补偿力矩进行侧向风作用下的转向补偿。本发明的控制方法、控制装置以及EPS系统和车辆,通过综合考虑车速和侧向风合力,对车辆直线行驶时的转矩进行精确控制,可以降低侧向风对车辆直线行驶的影响,提高驾驶安全性。

车辆转向控制方法、装置、车载控制器和车辆.pdf
本发明提供了一种车辆转向控制方法、装置、车载控制器和车辆,涉及车辆的技术领域,应用于车载控制器中,车载控制器包括:检测模块、影像采集模块、显示模块;检测模块设置在位于左侧、右侧车门和车体之间的橡胶软管处,用于检测橡胶软管是否存在电信号的检测模块,当车辆中的转向灯启动时,橡胶软管通电;方法包括:接收检测模块检测到的电信号;在接收到检测模块检测到的电信号后,确定车辆当前转向方向;根据车辆当前转向方向,控制影像采集模块采集车辆当前转向方向后方的影像;将影像采集模块采集到的影像发送至显示模块,以能显示车辆当前转向