
车速预测方法和装置.pdf

萌运****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车速预测方法和装置.pdf
本公开涉及一种车速预测方法和装置,该方法包括:获取车辆的N个车轮在当前周期的轮速样本集合和纵向加速度;根据当前周期的轮速样本集合和纵向加速度建立动态预测模型,并根据上一周期获得的误差修正参数对动态预测模型进行修正;根据预设的状态空间模型以及轮速样本集合获取状态空间向量;根据状态空间向量以及当前周期的纵向加速度,利用修正后的动态预测模型获取当前周期的车速预测值;根据当前周期以及之前M个周期获取的车速预测值,与当前周期以及M个周期获取的参考轮轮速实测值,获取误差样本集合;根据误差样本集合获取用于下一周期的误差

车速测量方法和装置.pdf
本发明公开了一种车速测量方法和装置。其中,该方法包括:获取基准车速值,其中,基准车速值是基于预设的轮胎规格确定的车速值;获取待测速汽车的轮胎规格;根据基准车速值和待测速汽车的轮胎规格,获取待测速汽车的车速值。本发明解决了现有技术中计算汽车的实际车速受局限条件较多的技术问题。
车速的确定方法和装置.pdf
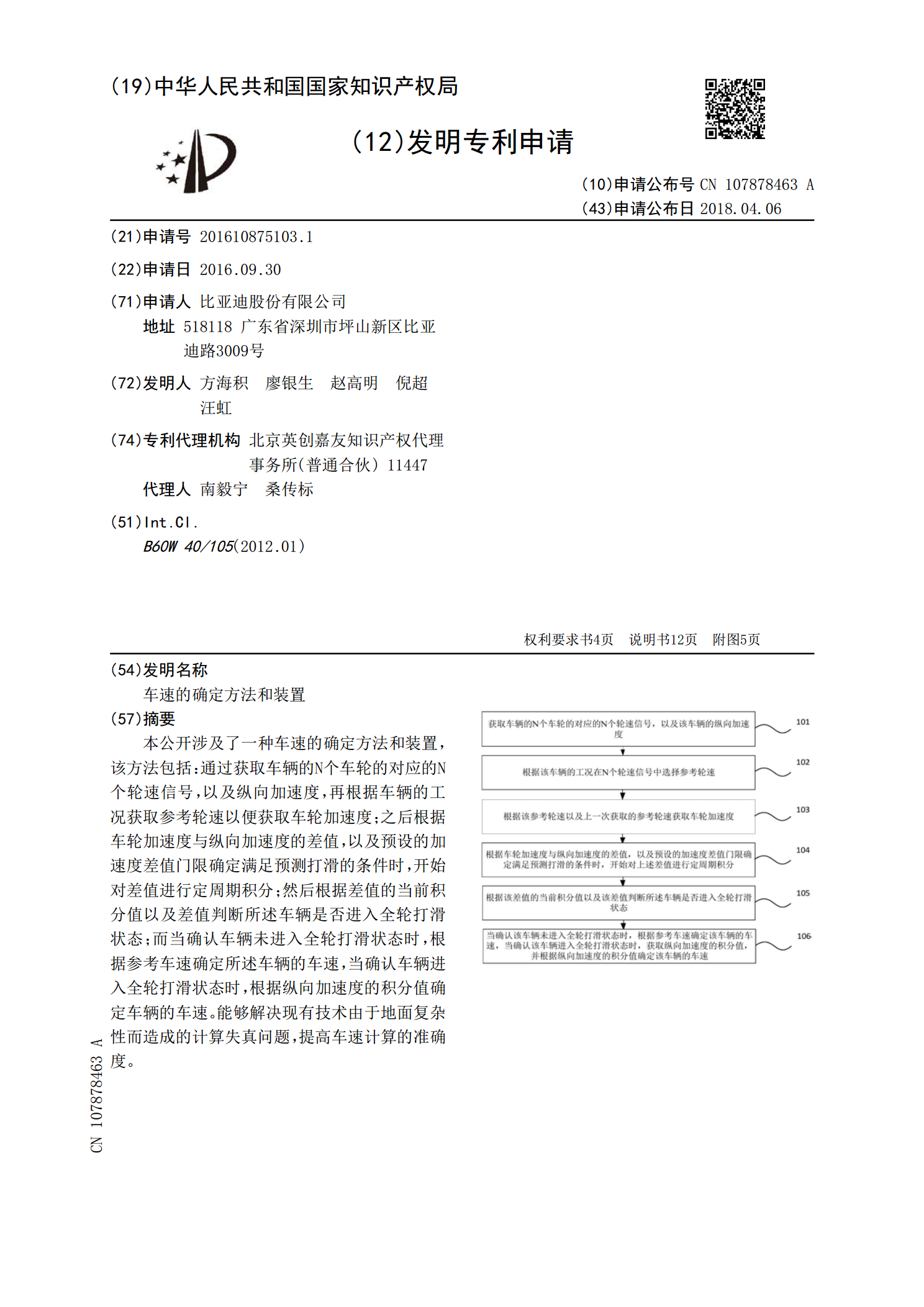
本公开涉及了一种车速的确定方法和装置,该方法包括:通过获取车辆的N个车轮的对应的N个轮速信号,以及纵向加速度,再根据车辆的工况获取参考轮速以便获取车轮加速度;之后根据车轮加速度与纵向加速度的差值,以及预设的加速度差值门限确定满足预测打滑的条件时,开始对差值进行定周期积分;然后根据差值的当前积分值以及差值判断所述车辆是否进入全轮打滑状态;而当确认车辆未进入全轮打滑状态时,根据参考车速确定所述车辆的车速,当确认车辆进入全轮打滑状态时,根据纵向加速度的积分值确定车辆的车速。能够解决现有技术由于地面复杂性而造成的

列车速度测量装置和方法.pdf
本发明提供了一种列车速度测量装置和方法。列车速度测量装置包括:至少一个第一转速表,其布置在拖车的车轴处并用于根据所述拖车的车轮转速输出脉冲信号;至少一个第二转速表,其布置在机动车的车轴处并用于根据所述机动车的车轮转速输出脉冲信号;至少一个速度测量单元,其用于基于由所述至少一个第一转速表和所述至少一个第二转速表输出的脉冲信号来测量速度值;以及速度计算单元,其用于基于测量到的速度值来计算列车的速度。

车速的测量方法和装置.pdf
本公开涉及了一种车速的测量方法和装置,该方法包括:通过获取目标车轮的轮速、车轮加速度以及车辆的纵向加速度;判断车轮加速度与纵向加速度的差值满足预设的车速估算条件时,开始分别对纵向加速度以及该差值进行时间上的积分;再根据车辆的工况、差值以及差值的当前积分值判断所述目标车轮的打滑状态;之后根据上述打滑状态在轮速和估算车速中选择其中一者作为目标车轮对应的车速;最后根据预设策略以及车辆上每个车轮对应的车速确定该车辆的真实车速。能够解决在不同的条件下计算差异较大以及对路面抗干扰性差问题,并且能够针对不同的打滑状态来