
一种卫星姿态快速调平装置.pdf

王秋****哥哥

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种卫星姿态快速调平装置.pdf
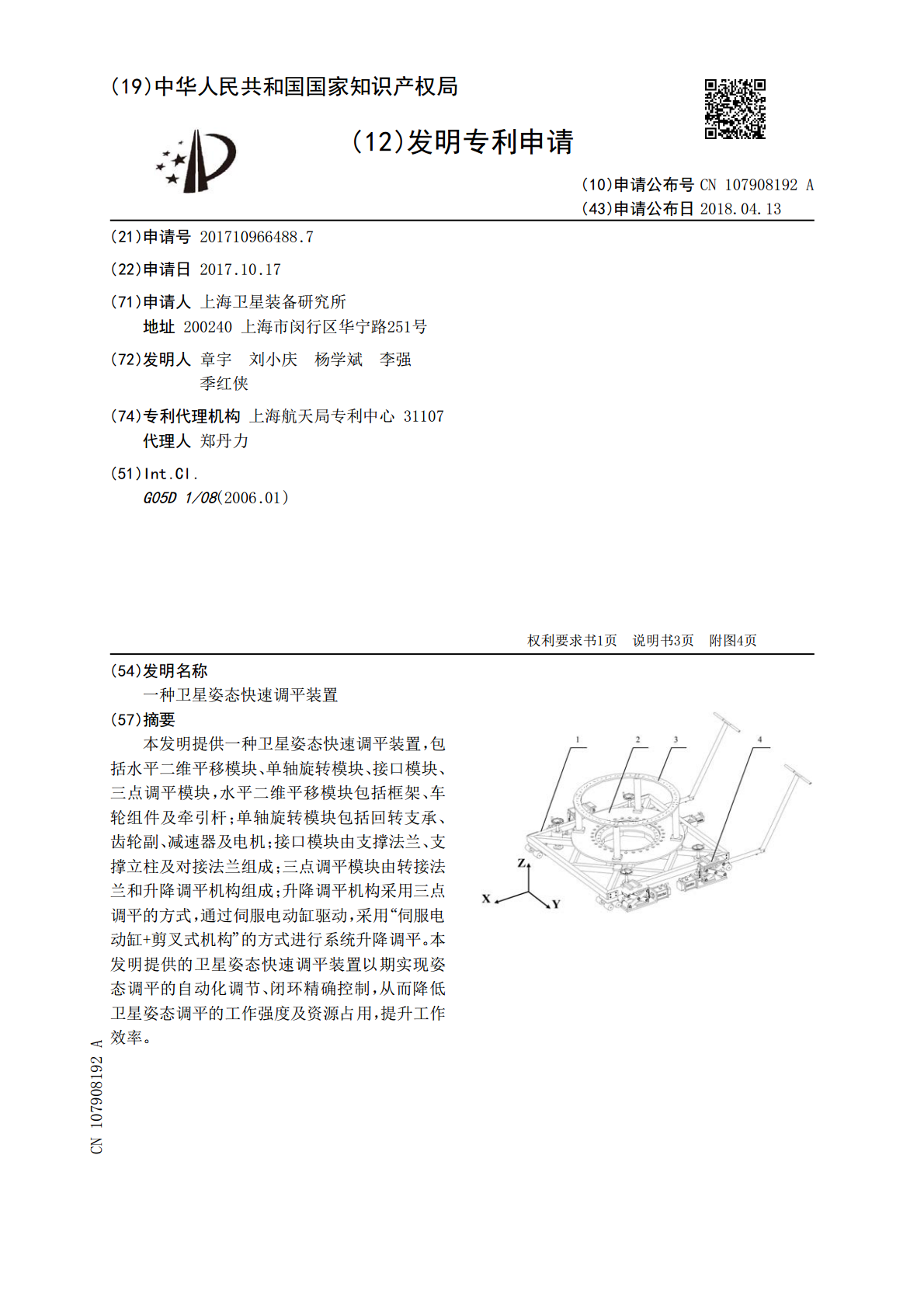
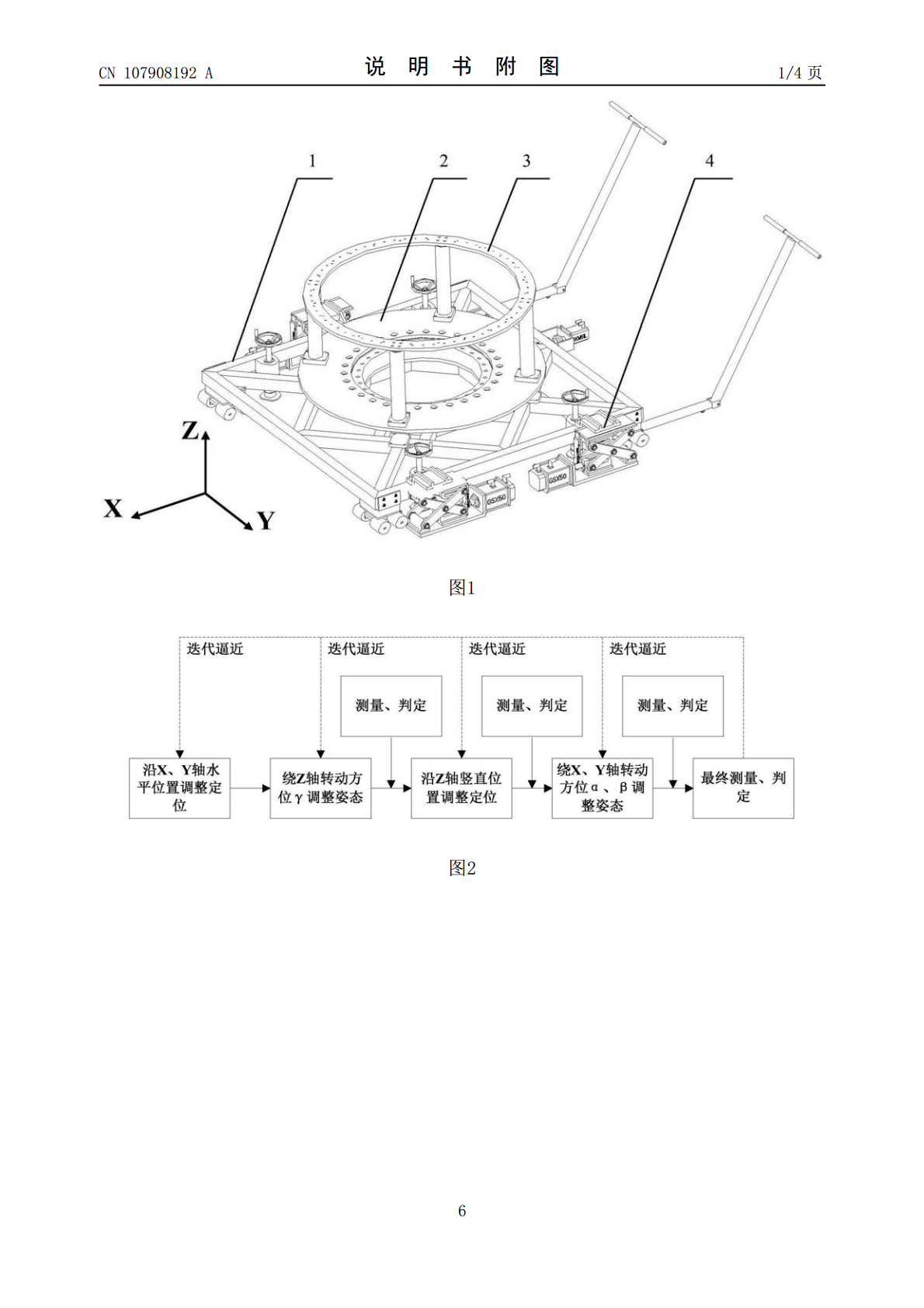
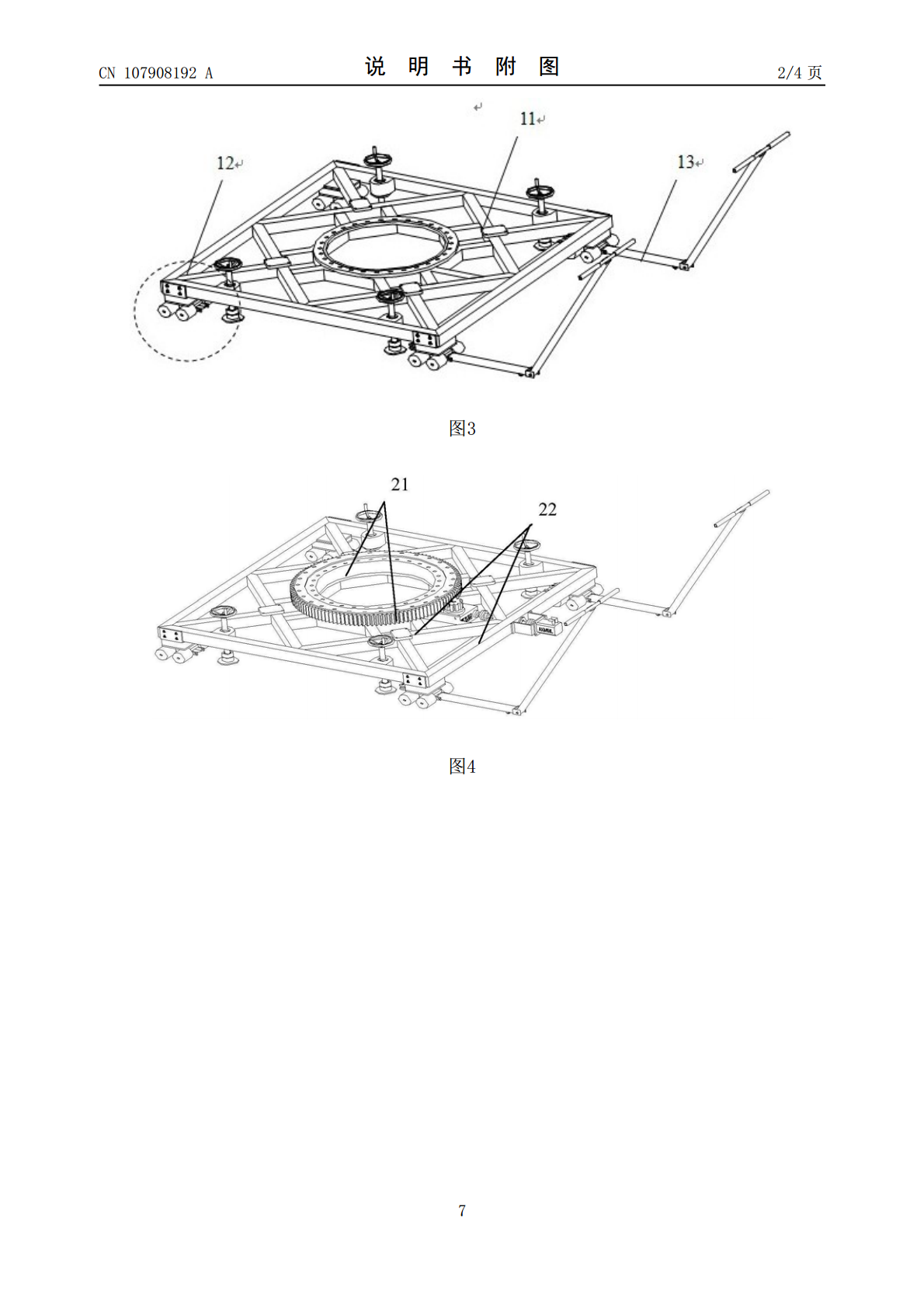
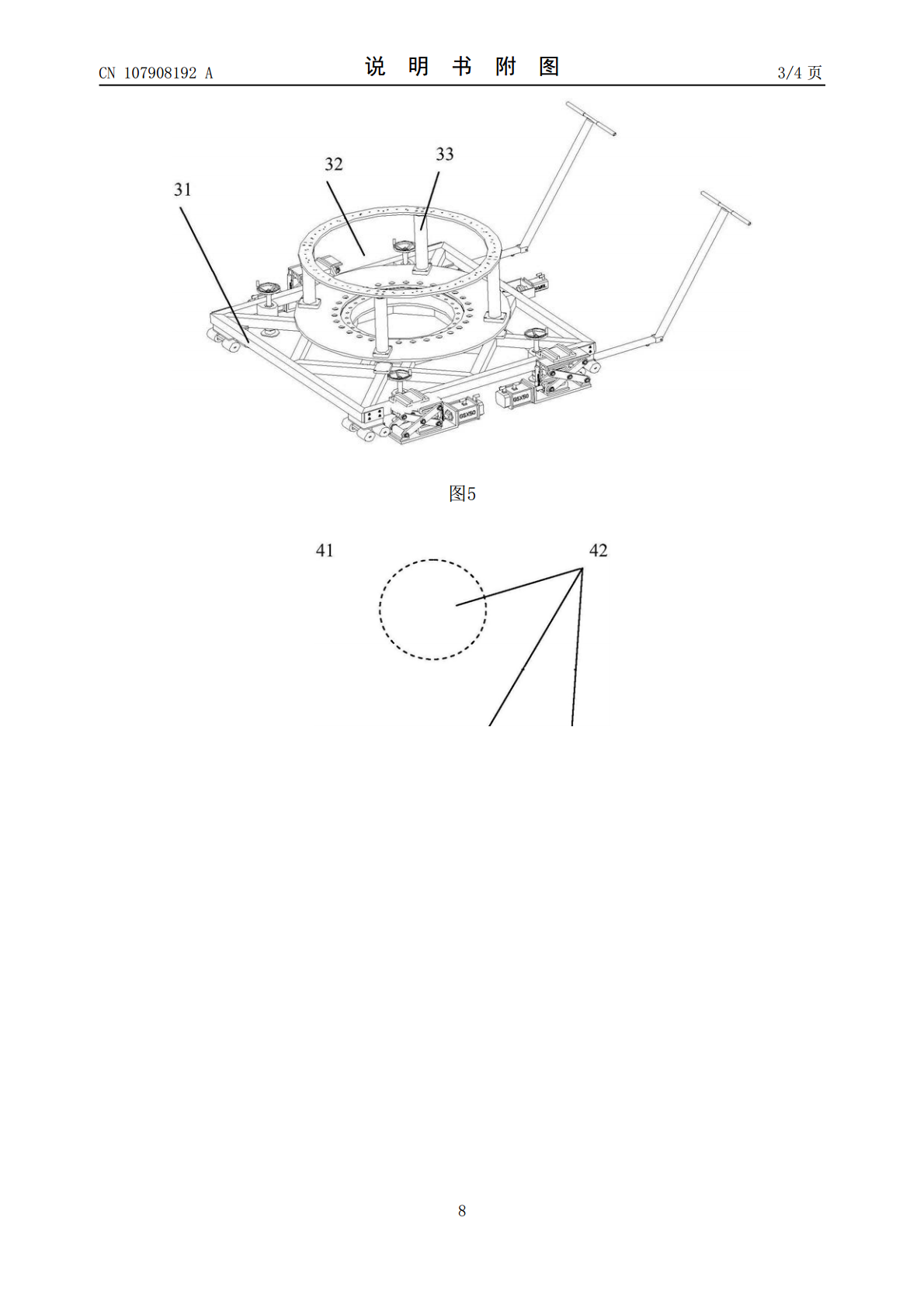
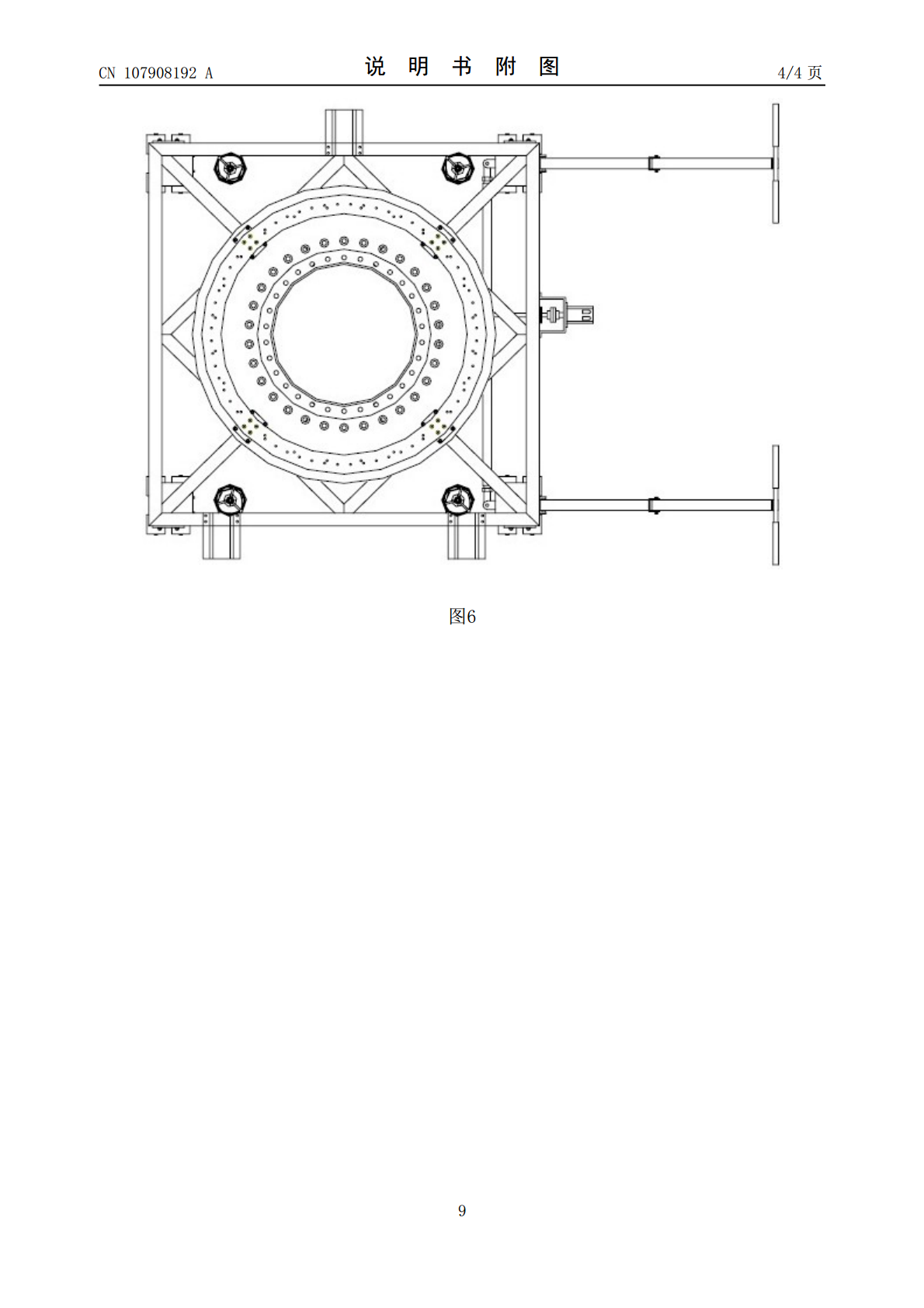
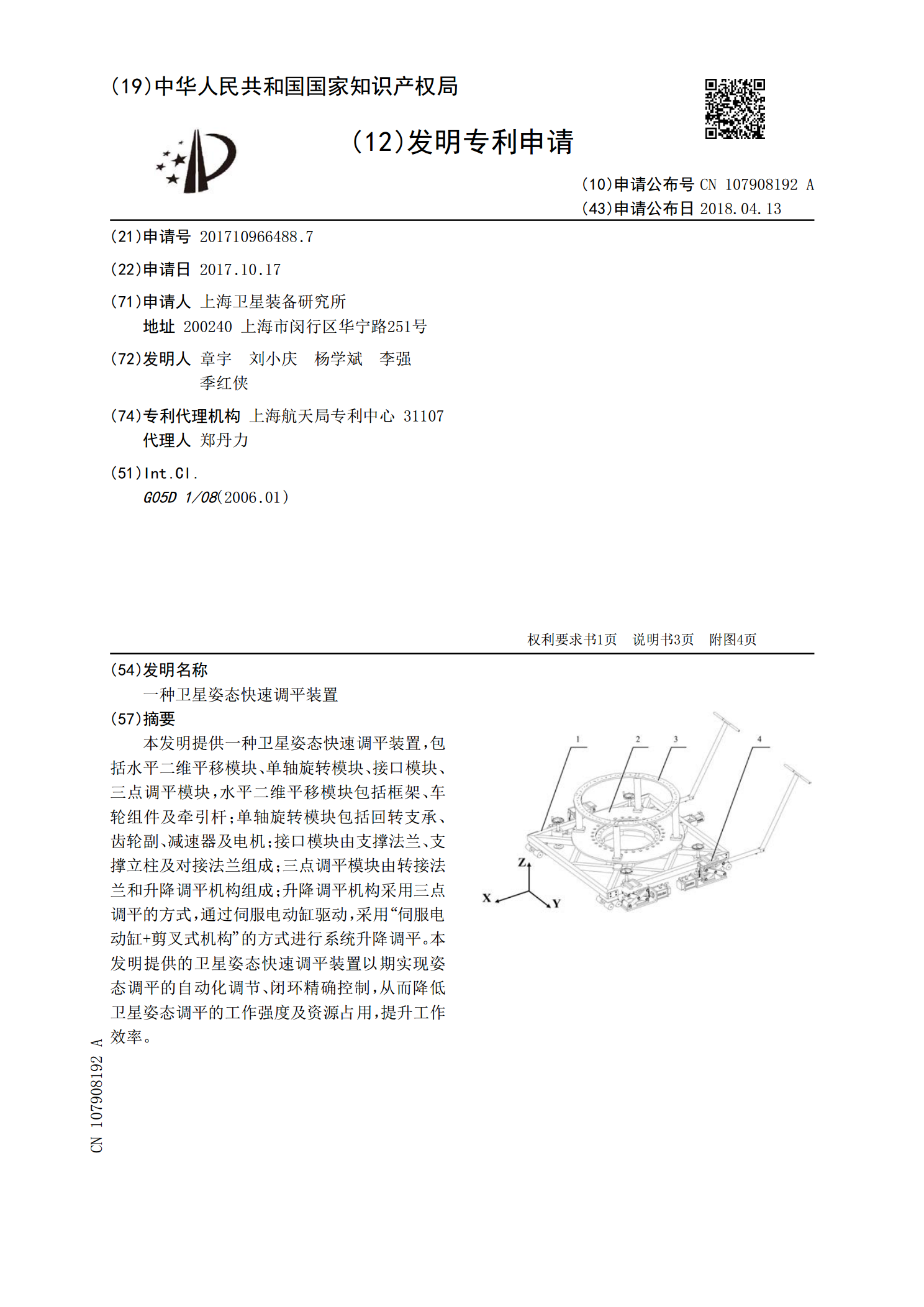
本发明提供一种卫星姿态快速调平装置,包括水平二维平移模块、单轴旋转模块、接口模块、三点调平模块,水平二维平移模块包括框架、车轮组件及牵引杆;单轴旋转模块包括回转支承、齿轮副、减速器及电机;接口模块由支撑法兰、支撑立柱及对接法兰组成;三点调平模块由转接法兰和升降调平机构组成;升降调平机构采用三点调平的方式,通过伺服电动缸驱动,采用“伺服电动缸+剪叉式机构”的方式进行系统升降调平。本发明提供的卫星姿态快速调平装置以期实现姿态调平的自动化调节、闭环精确控制,从而降低卫星姿态调平的工作强度及资源占用,提升工作效率
一种苹果姿态精调装置及姿态调整设备.pdf
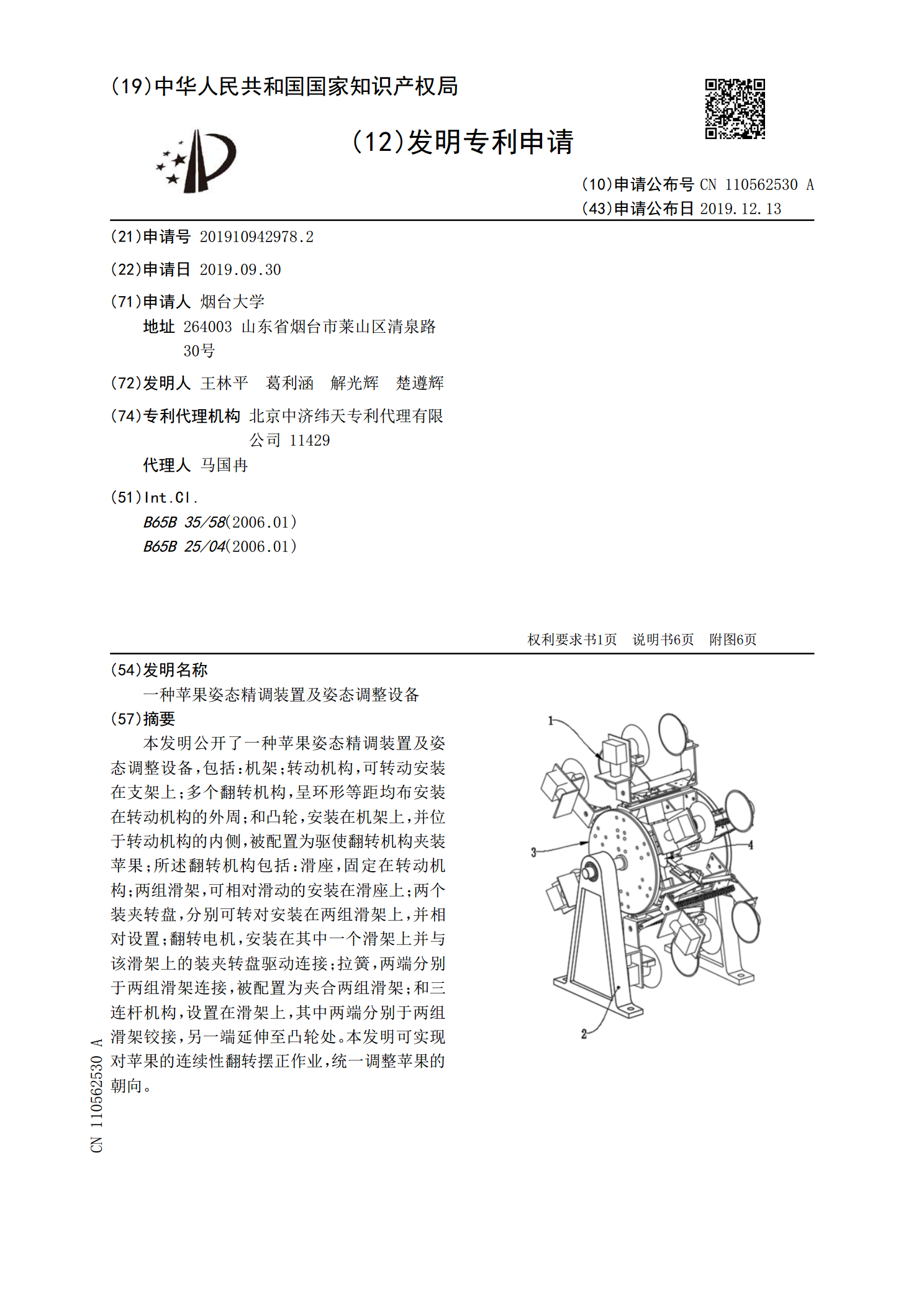
本发明公开了一种苹果姿态精调装置及姿态调整设备,包括:机架;转动机构,可转动安装在支架上;多个翻转机构,呈环形等距均布安装在转动机构的外周;和凸轮,安装在机架上,并位于转动机构的内侧,被配置为驱使翻转机构夹装苹果;所述翻转机构包括:滑座,固定在转动机构;两组滑架,可相对滑动的安装在滑座上;两个装夹转盘,分别可转对安装在两组滑架上,并相对设置;翻转电机,安装在其中一个滑架上并与该滑架上的装夹转盘驱动连接;拉簧,两端分别于两组滑架连接,被配置为夹合两组滑架;和三连杆机构,设置在滑架上,其中两端分别于两组滑架铰
卫星姿态模拟仿真装置.pdf
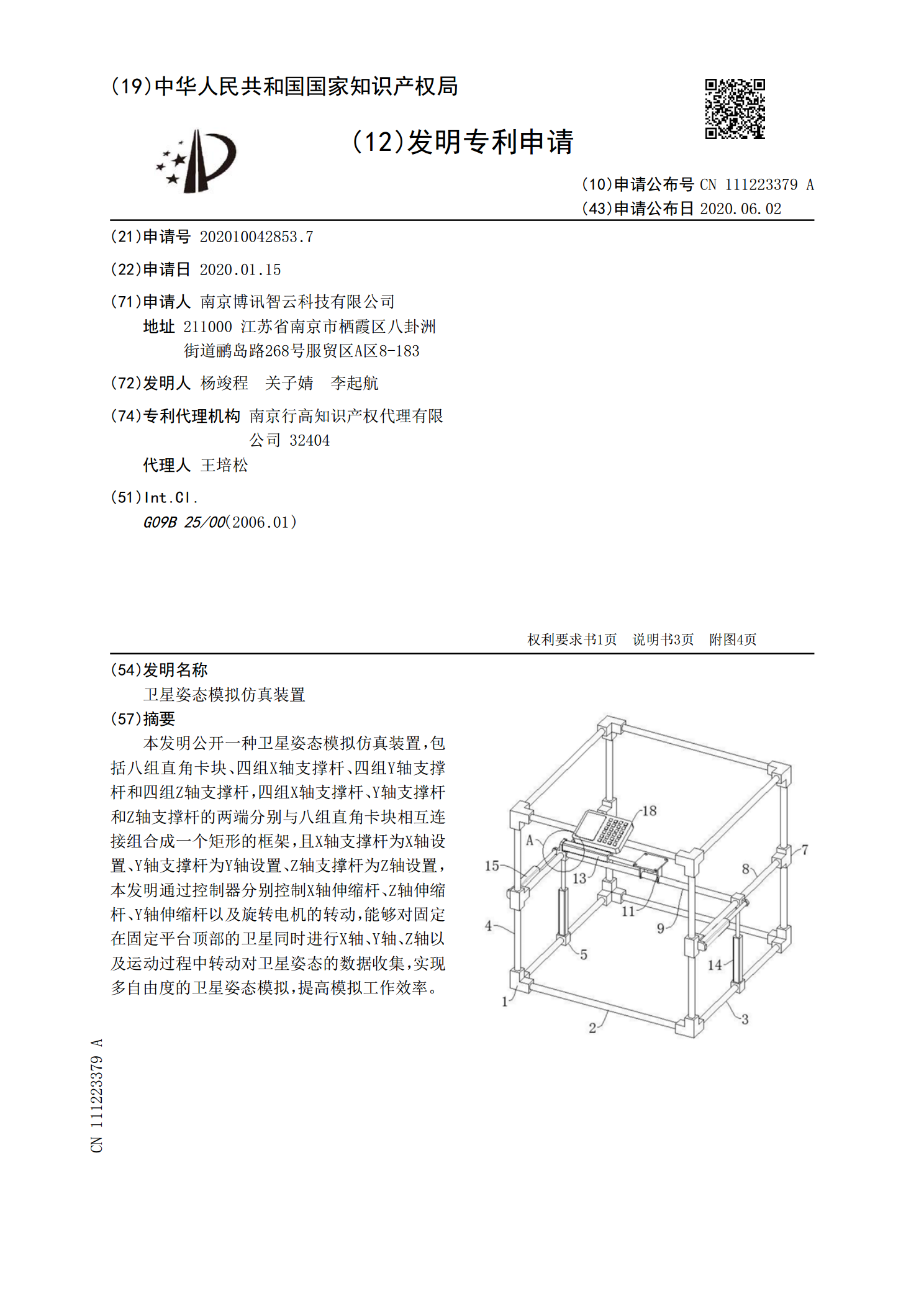
本发明公开一种卫星姿态模拟仿真装置,包括八组直角卡块、四组X轴支撑杆、四组Y轴支撑杆和四组Z轴支撑杆,四组X轴支撑杆、Y轴支撑杆和Z轴支撑杆的两端分别与八组直角卡块相互连接组合成一个矩形的框架,且X轴支撑杆为X轴设置、Y轴支撑杆为Y轴设置、Z轴支撑杆为Z轴设置,本发明通过控制器分别控制X轴伸缩杆、Z轴伸缩杆、Y轴伸缩杆以及旋转电机的转动,能够对固定在固定平台顶部的卫星同时进行X轴、Y轴、Z轴以及运动过程中转动对卫星姿态的数据收集,实现多自由度的卫星姿态模拟,提高模拟工作效率。
一种敏捷小卫星姿态快速机动控制方法.pdf
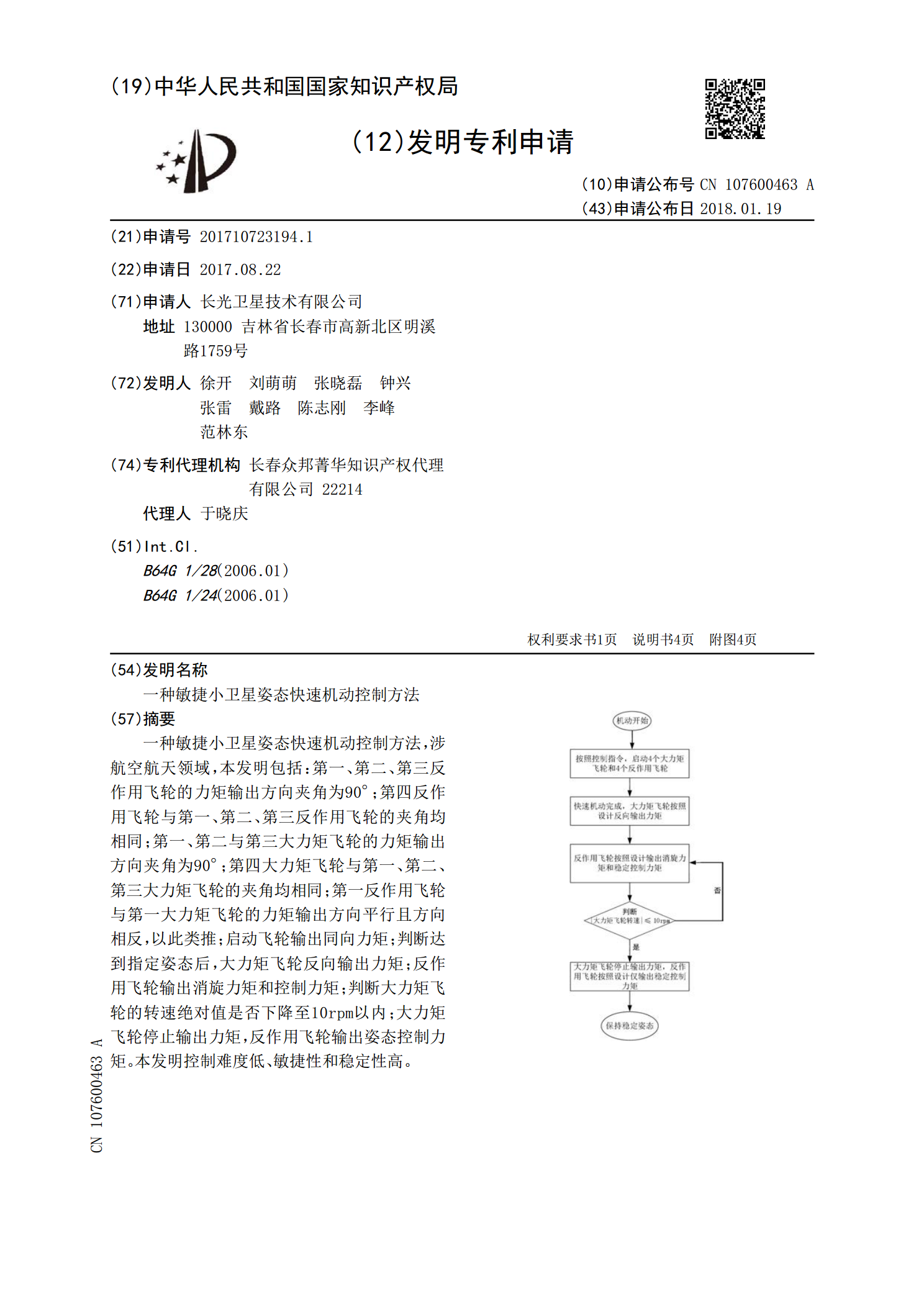
一种敏捷小卫星姿态快速机动控制方法,涉航空航天领域,本发明包括:第一、第二、第三反作用飞轮的力矩输出方向夹角为90°;第四反作用飞轮与第一、第二、第三反作用飞轮的夹角均相同;第一、第二与第三大力矩飞轮的力矩输出方向夹角为90°;第四大力矩飞轮与第一、第二、第三大力矩飞轮的夹角均相同;第一反作用飞轮与第一大力矩飞轮的力矩输出方向平行且方向相反,以此类推;启动飞轮输出同向力矩;判断达到指定姿态后,大力矩飞轮反向输出力矩;反作用飞轮输出消旋力矩和控制力矩;判断大力矩飞轮的转速绝对值是否下降至10rpm以内;大力
一种车身姿态预估调平控制方法.pdf
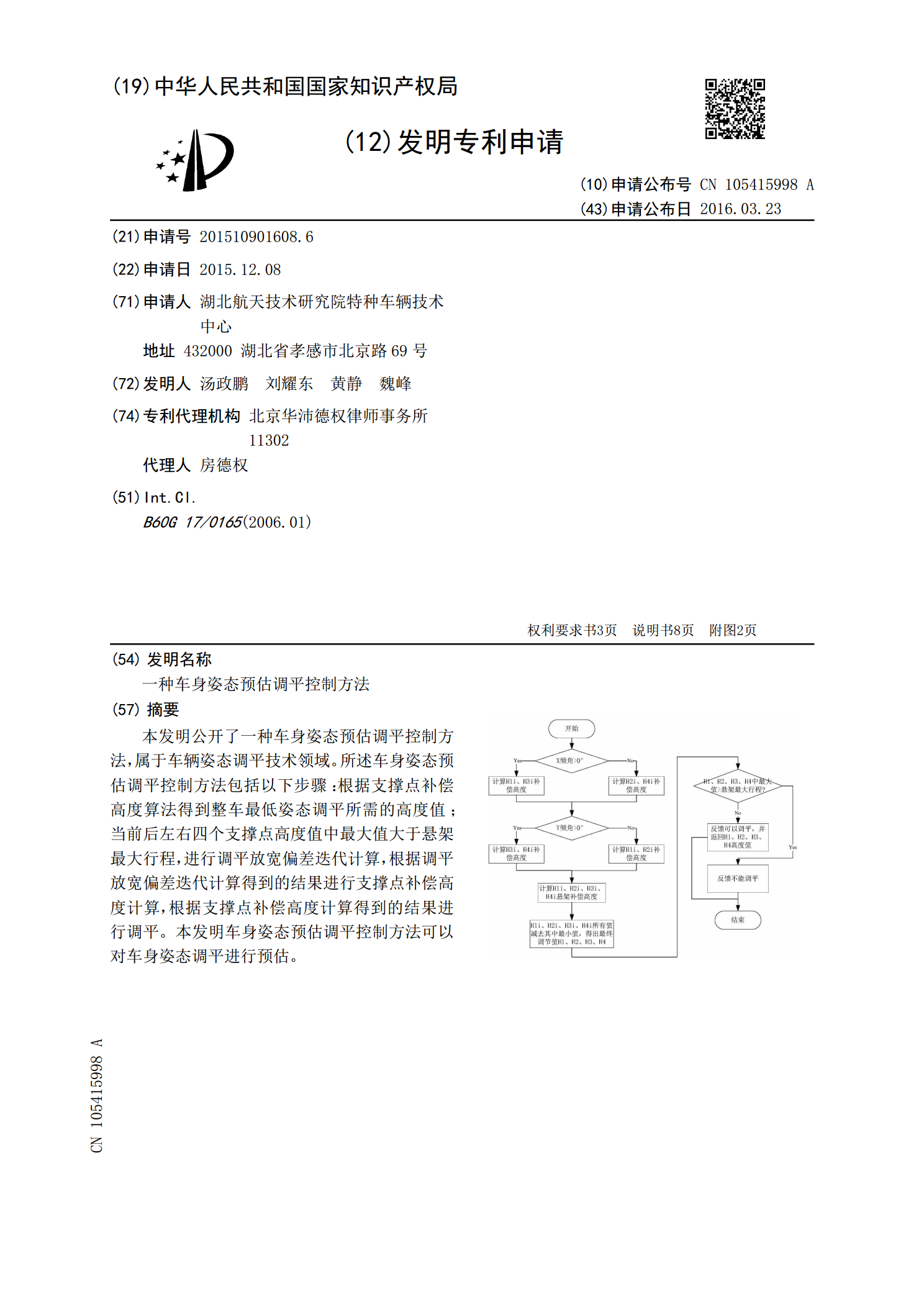
本发明公开了一种车身姿态预估调平控制方法,属于车辆姿态调平技术领域。所述车身姿态预估调平控制方法包括以下步骤:根据支撑点补偿高度算法得到整车最低姿态调平所需的高度值;当前后左右四个支撑点高度值中最大值大于悬架最大行程,进行调平放宽偏差迭代计算,根据调平放宽偏差迭代计算得到的结果进行支撑点补偿高度计算,根据支撑点补偿高度计算得到的结果进行调平。本发明车身姿态预估调平控制方法可以对车身姿态调平进行预估。