
卫星姿态模拟仿真装置.pdf

Ja****44

1/9
2/9
3/9

4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
卫星姿态模拟仿真装置.pdf
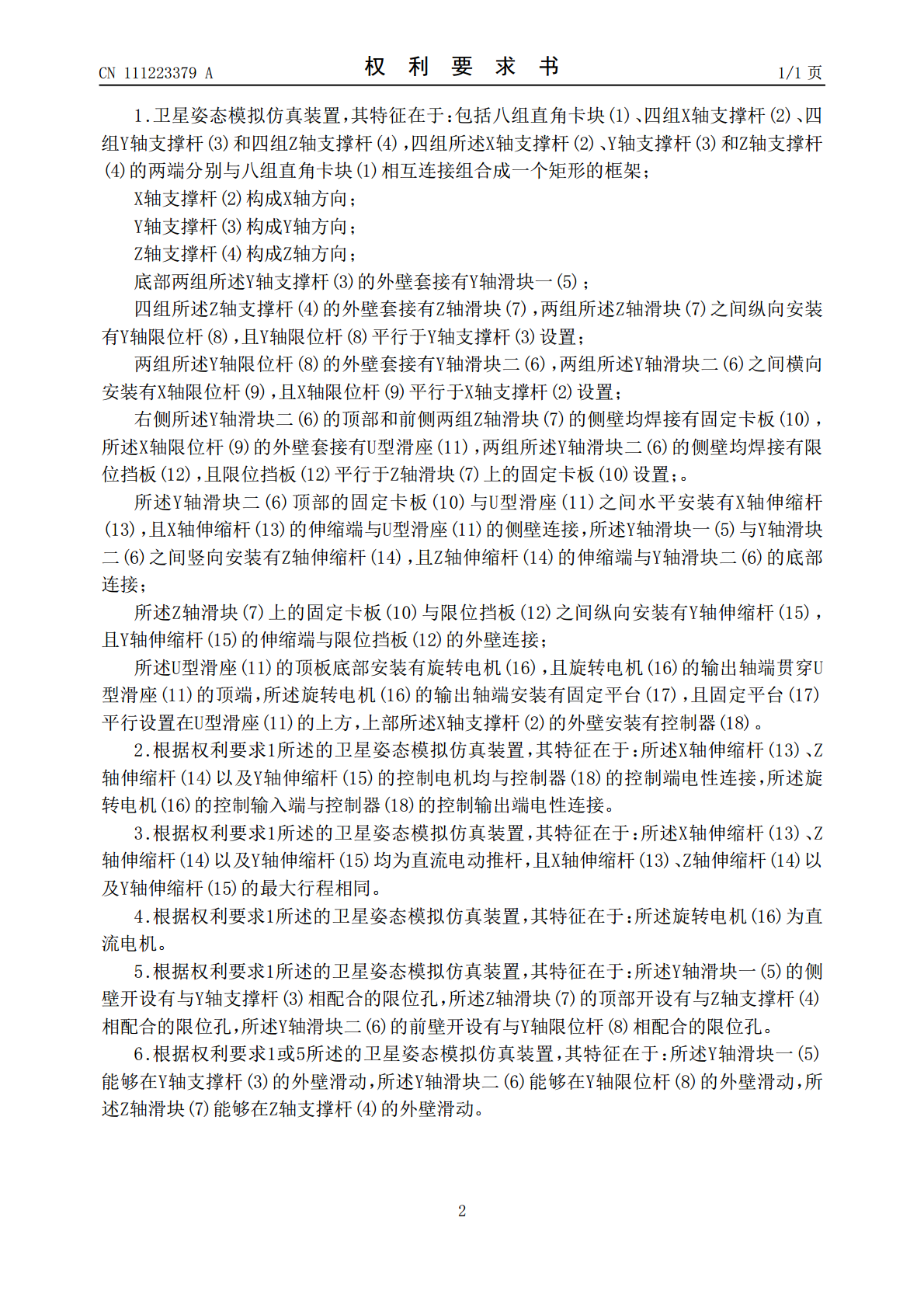
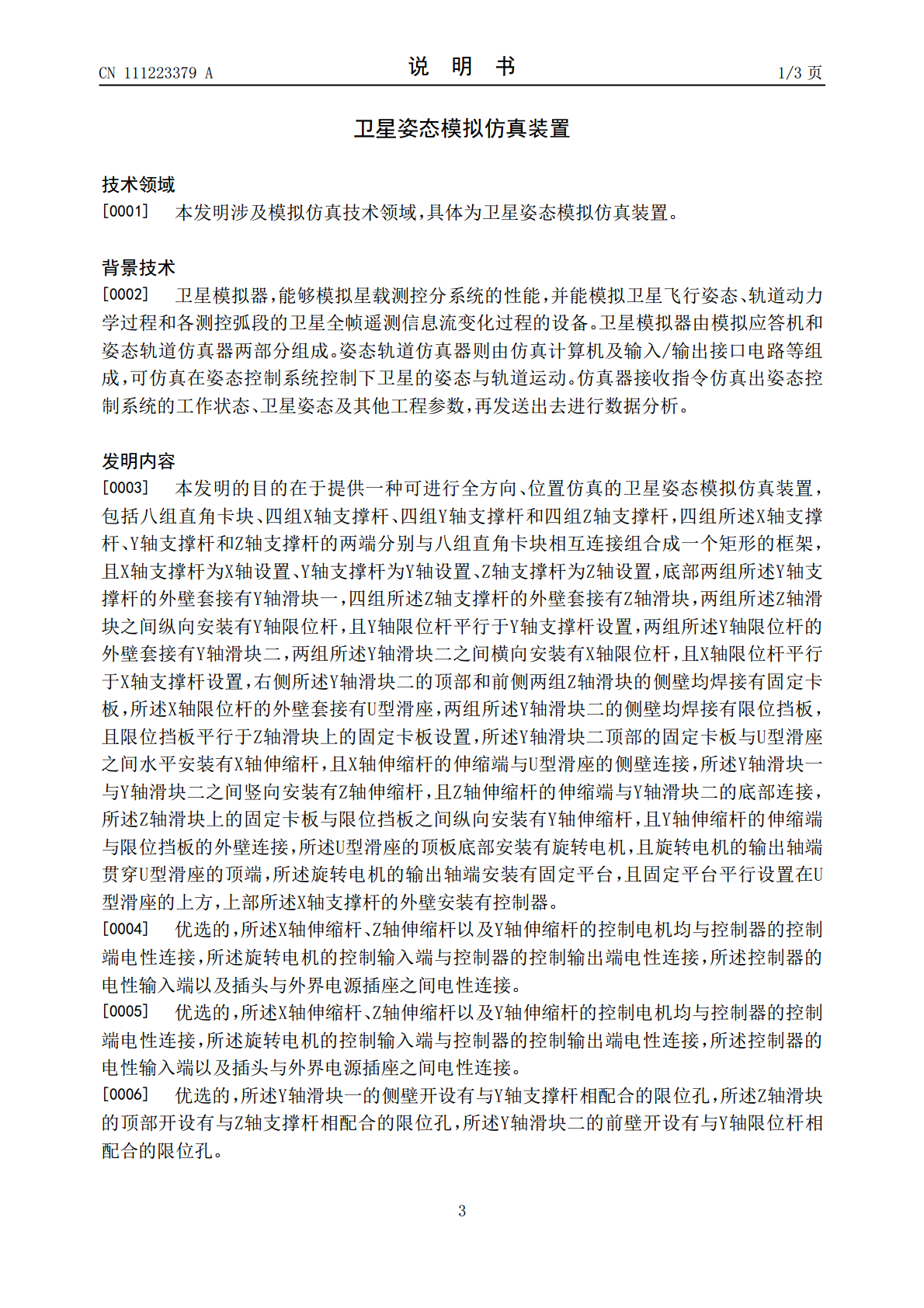
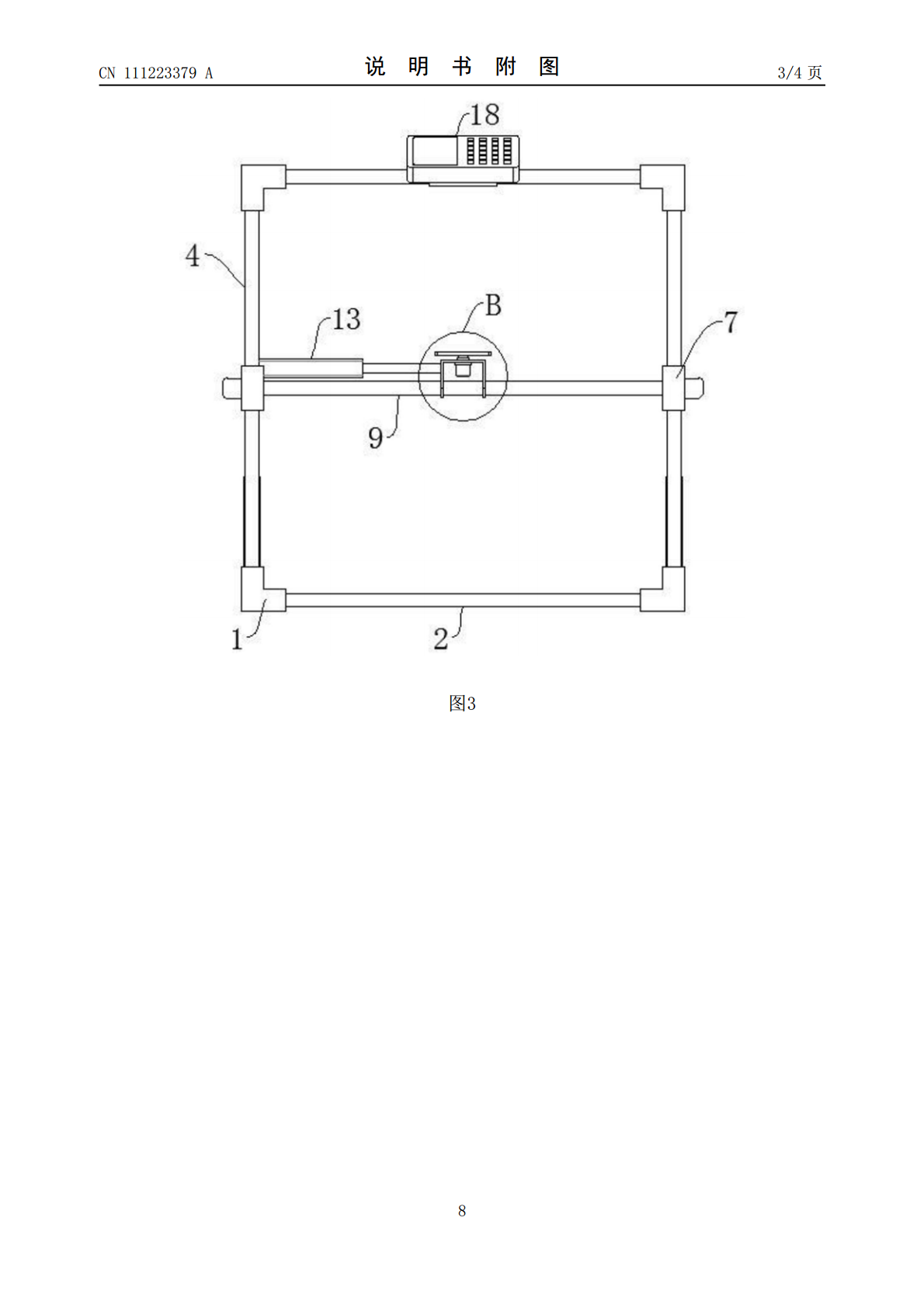
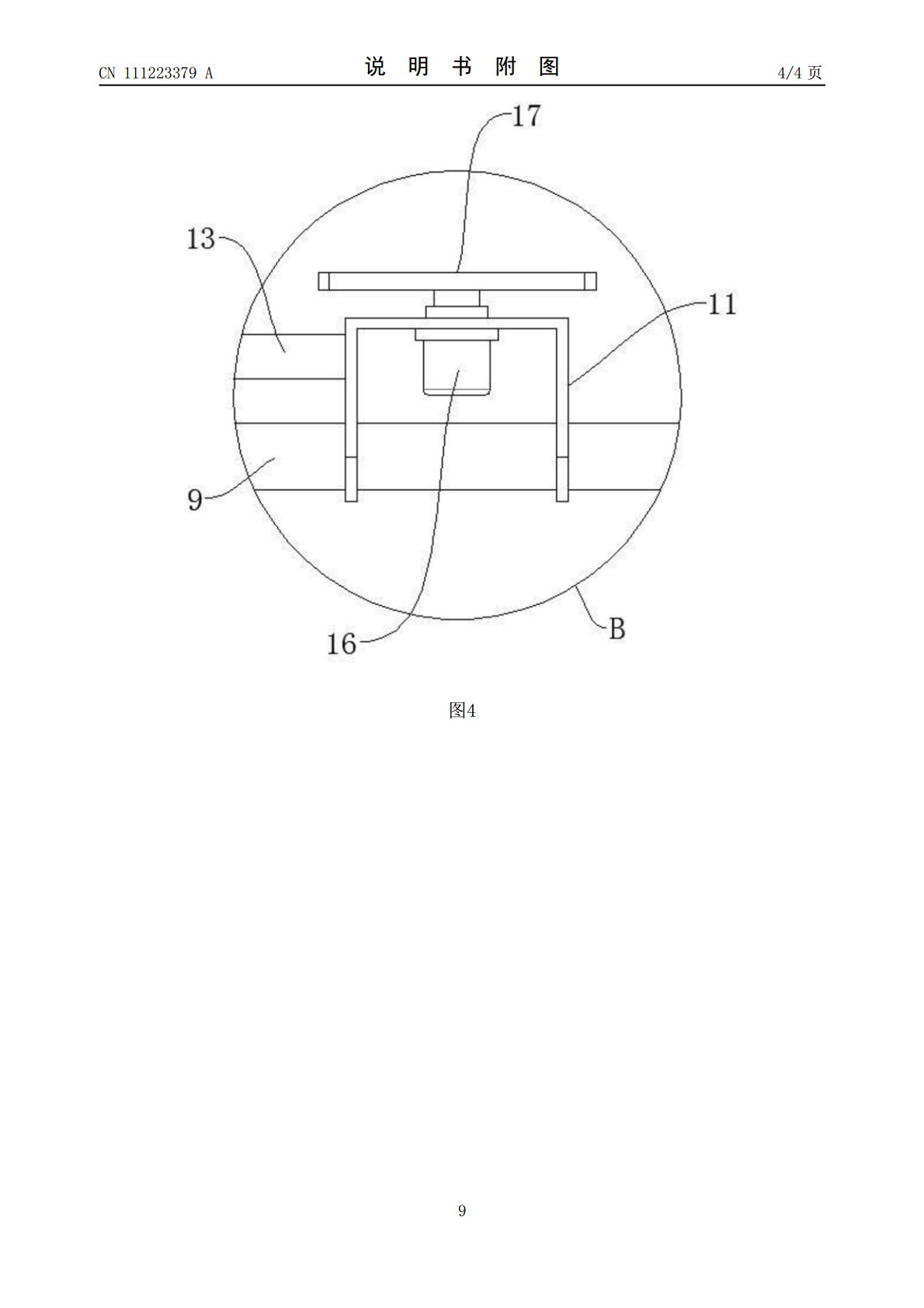
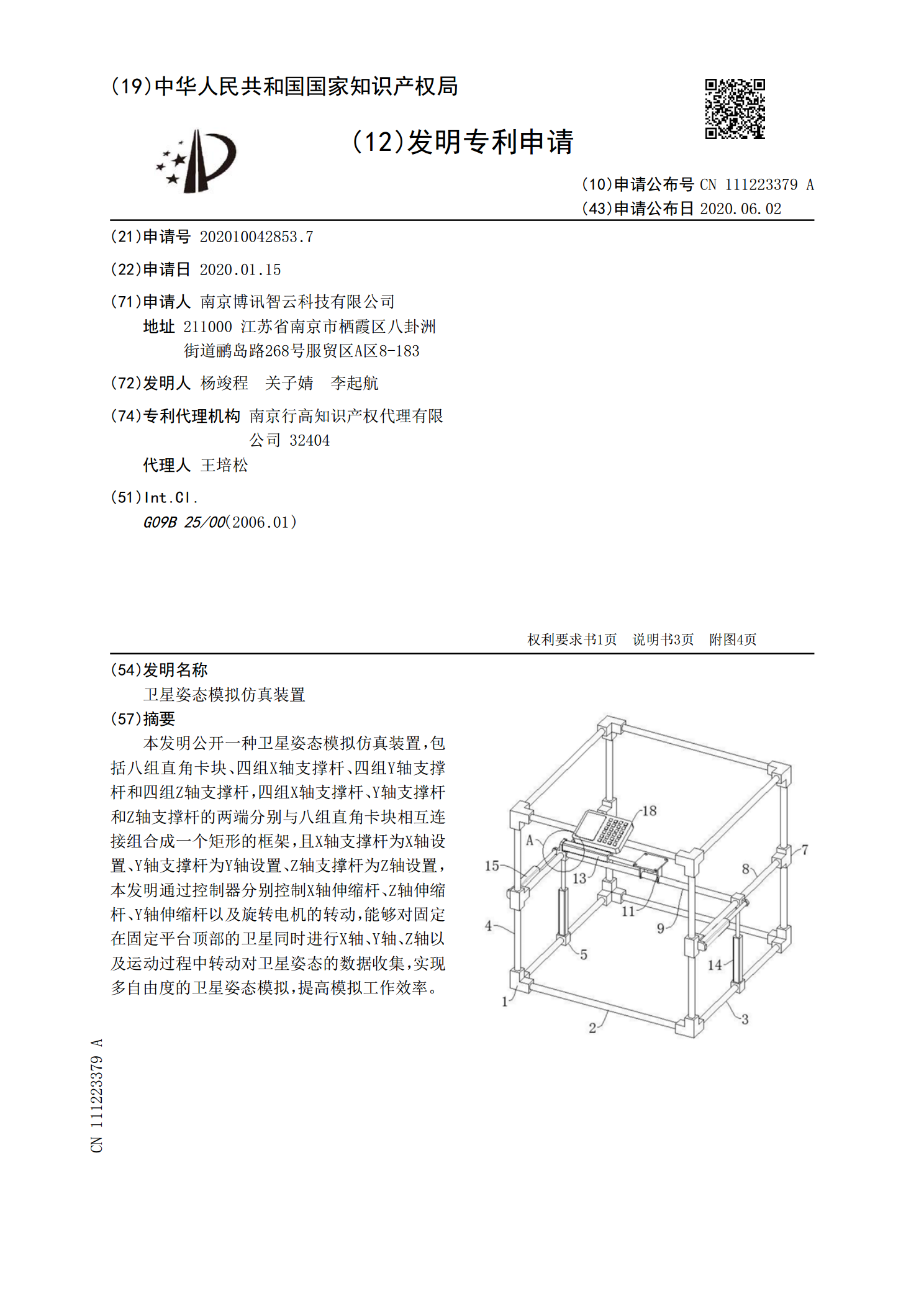
本发明公开一种卫星姿态模拟仿真装置,包括八组直角卡块、四组X轴支撑杆、四组Y轴支撑杆和四组Z轴支撑杆,四组X轴支撑杆、Y轴支撑杆和Z轴支撑杆的两端分别与八组直角卡块相互连接组合成一个矩形的框架,且X轴支撑杆为X轴设置、Y轴支撑杆为Y轴设置、Z轴支撑杆为Z轴设置,本发明通过控制器分别控制X轴伸缩杆、Z轴伸缩杆、Y轴伸缩杆以及旋转电机的转动,能够对固定在固定平台顶部的卫星同时进行X轴、Y轴、Z轴以及运动过程中转动对卫星姿态的数据收集,实现多自由度的卫星姿态模拟,提高模拟工作效率。
编队卫星姿态协同控制仿真装置及其仿真验证方法.pdf
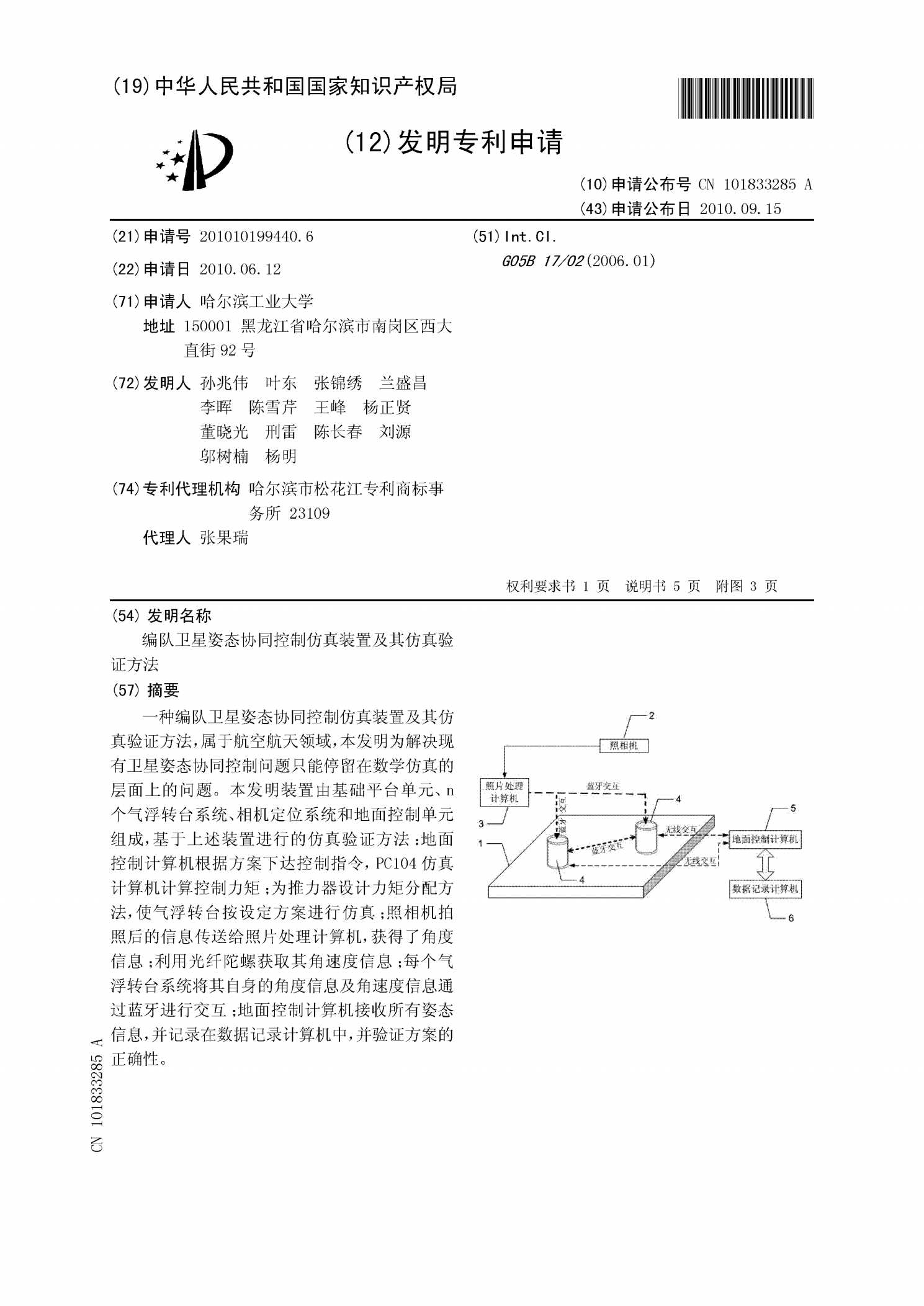
一种编队卫星姿态协同控制仿真装置及其仿真验证方法,属于航空航天领域,本发明为解决现有卫星姿态协同控制问题只能停留在数学仿真的层面上的问题。本发明装置由基础平台单元、n个气浮转台系统、相机定位系统和地面控制单元组成,基于上述装置进行的仿真验证方法:地面控制计算机根据方案下达控制指令,PC104仿真计算机计算控制力矩;为推力器设计力矩分配方法,使气浮转台按设定方案进行仿真;照相机拍照后的信息传送给照片处理计算机,获得了角度信息;利用光纤陀螺获取其角速度信息;每个气浮转台系统将其自身的角度信息及角速度信息通过蓝

卫星姿态模糊PID控制的可视化仿真分析.docx
卫星姿态模糊PID控制的可视化仿真分析卫星姿态控制是卫星在空间运行中必不可少的一个环节,它能够控制卫星的方向、角速度和角加速度等运动状态,确保卫星始终保持良好的姿态,从而有效地完成卫星的任务。PID控制是一种经典的、简单易用的控制方法,常被用于卫星姿态控制中。本文将重点介绍卫星姿态模糊PID控制的可视化仿真分析。一、卫星姿态控制基本概念卫星的姿态控制主要包括以下几个方面:1.方向控制:即卫星的朝向控制,可以通过调整卫星的推力、引力、姿态等来实现。2.角速度控制:即控制卫星围绕某个轴线的旋转速率,可以通过控

基于STK的卫星姿态控制仿真技术研究.docx
基于STK的卫星姿态控制仿真技术研究摘要:本文主要探讨了基于STK的卫星姿态控制仿真技术,包括STK软件的基本功能和运用方法、卫星姿态控制的基本原理和算法、姿态仿真的建模方法和仿真过程中的误差分析等方面。通过分析和模拟实验,得出了几种典型的姿态控制算法的优缺点,以及不同建模方式所带来的精度误差,为实现卫星姿态控制提供了一些参考和探索。关键词:STK;卫星姿态控制;仿真技术;算法;误差分析。一、引言随着卫星技术的不断发展,卫星姿态控制已成为卫星设计与运行中的重要问题。在卫星姿态控制中,研究不同的控制算法和姿

光学遥感卫星凝视成像姿态规划及快速仿真方法.docx
光学遥感卫星凝视成像姿态规划及快速仿真方法光学遥感卫星凝视成像姿态规划及快速仿真方法摘要:光学遥感卫星是获取地球观测信息的重要手段之一。在遥感卫星成像过程中,凝视成像姿态规划是保证图像质量和覆盖范围的关键问题。本论文通过研究凝视成像姿态规划的方法,提出了一种快速仿真方法,旨在提高遥感卫星的成像效率和精度。首先,介绍了光学遥感卫星的基本原理和成像过程。然后,综述了现有的凝视成像姿态规划方法,并分析其优点和局限性。接着,提出了一种基于遗传算法的凝视成像姿态规划方法,并详细介绍了算法的流程和实现步骤。最后,使用