
一种车身姿态预估调平控制方法.pdf

涵蓄****09

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车身姿态预估调平控制方法.pdf
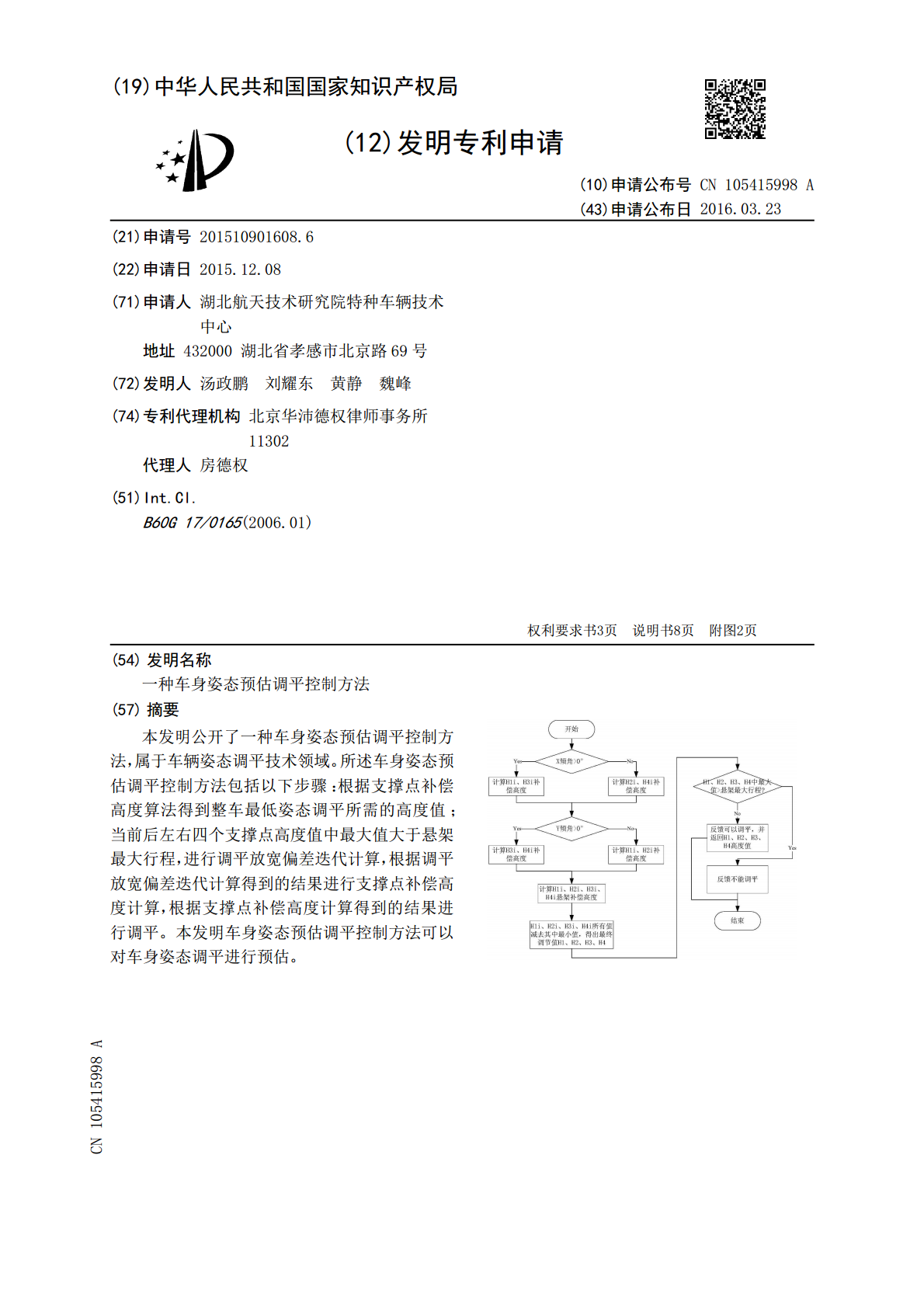
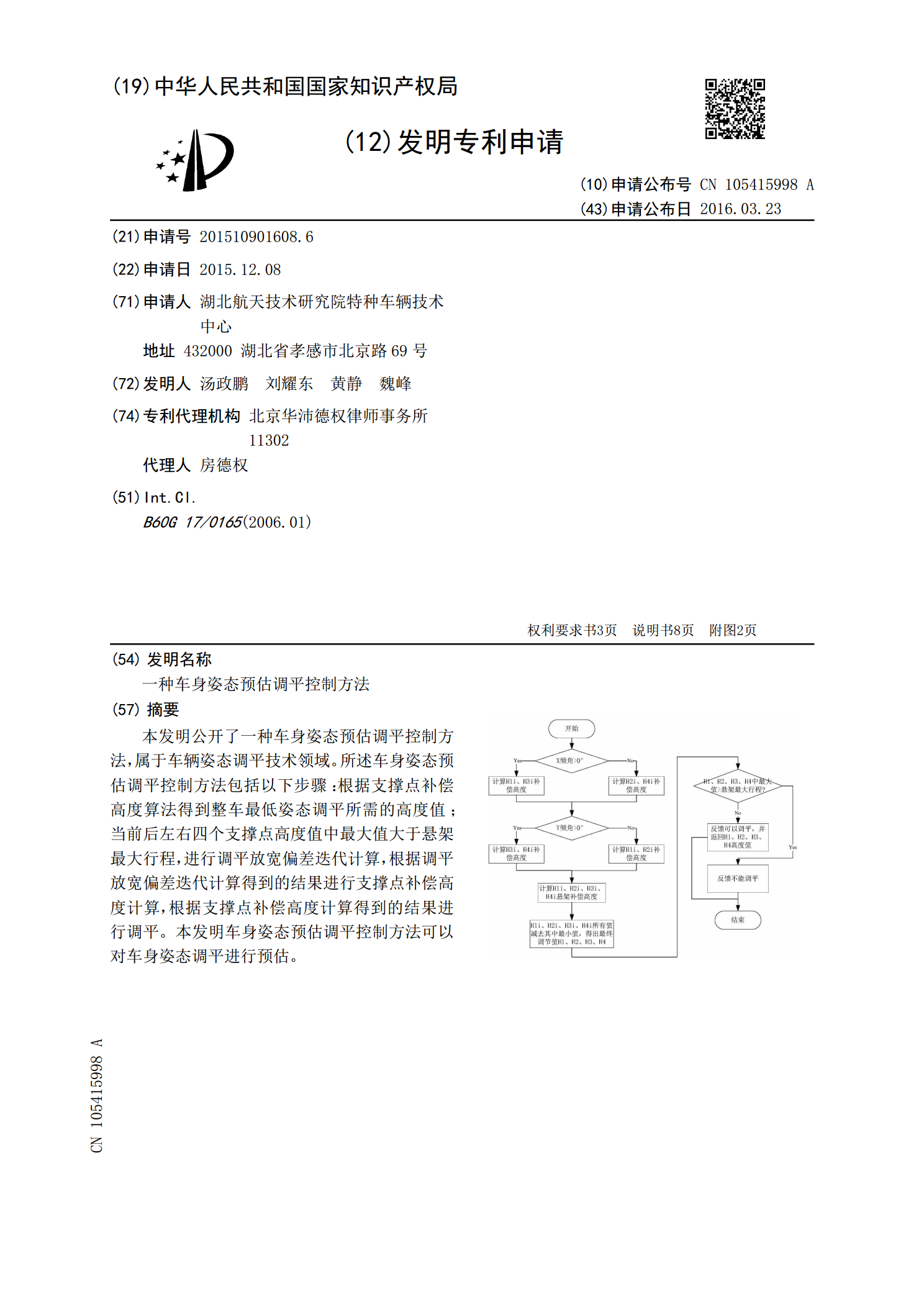
本发明公开了一种车身姿态预估调平控制方法,属于车辆姿态调平技术领域。所述车身姿态预估调平控制方法包括以下步骤:根据支撑点补偿高度算法得到整车最低姿态调平所需的高度值;当前后左右四个支撑点高度值中最大值大于悬架最大行程,进行调平放宽偏差迭代计算,根据调平放宽偏差迭代计算得到的结果进行支撑点补偿高度计算,根据支撑点补偿高度计算得到的结果进行调平。本发明车身姿态预估调平控制方法可以对车身姿态调平进行预估。
一种车身自动调平器.pdf
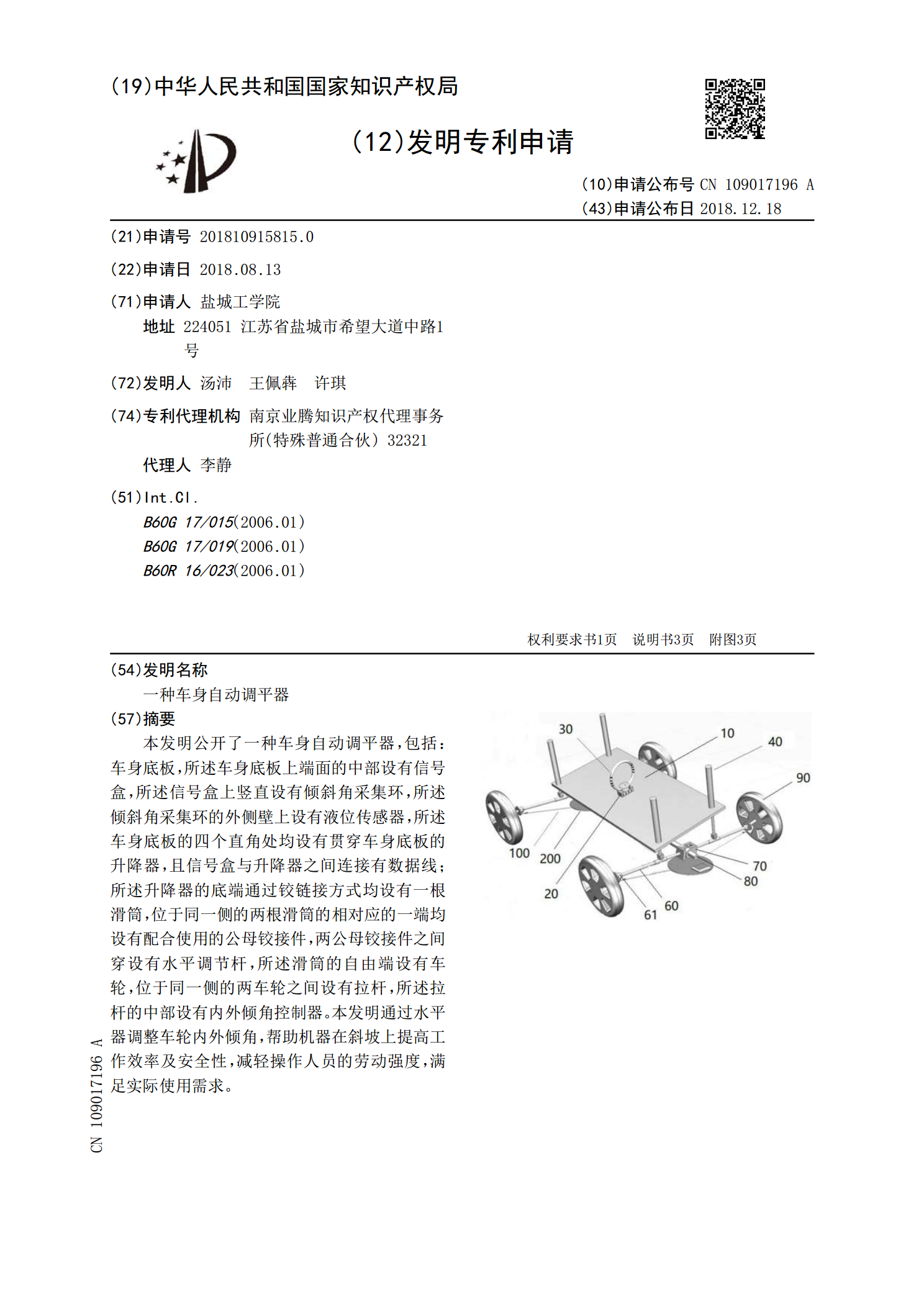
本发明公开了一种车身自动调平器,包括:车身底板,所述车身底板上端面的中部设有信号盒,所述信号盒上竖直设有倾斜角采集环,所述倾斜角采集环的外侧壁上设有液位传感器,所述车身底板的四个直角处均设有贯穿车身底板的升降器,且信号盒与升降器之间连接有数据线;所述升降器的底端通过铰链接方式均设有一根滑筒,位于同一侧的两根滑筒的相对应的一端均设有配合使用的公母铰接件,两公母铰接件之间穿设有水平调节杆,所述滑筒的自由端设有车轮,位于同一侧的两车轮之间设有拉杆,所述拉杆的中部设有内外倾角控制器。本发明通过水平器调整车轮内外倾

一种车身姿态控制方法、装置、设备及车辆.pdf
本发明公开了一种车身姿态控制方法、装置、设备及车辆,涉及汽车减震系统控制技术领域,该方法包括以下步骤:根据四个车轮位置的加速度和质心位置,确定四个空气弹簧处各自对应的拐角加速度;根据四个空气弹簧处各自对应的拐角加速度,确定每个空气弹簧的荷载大小及荷载偏移量;根据每个空气弹簧的荷载大小,结合该空气弹簧当前压力对应的压缩系数,确定每个空气弹簧的伸缩量;根据空气弹簧的伸缩量及荷载偏移量,确定每个阀口充放气量及充放气速率,调整对应空气弹簧的长度。本申请能够解决现有技术中车辆侧倾、横摆及垂向等车身姿态变动时无法同时
一种车架自动调平系统、调平及安全控制方法.pdf
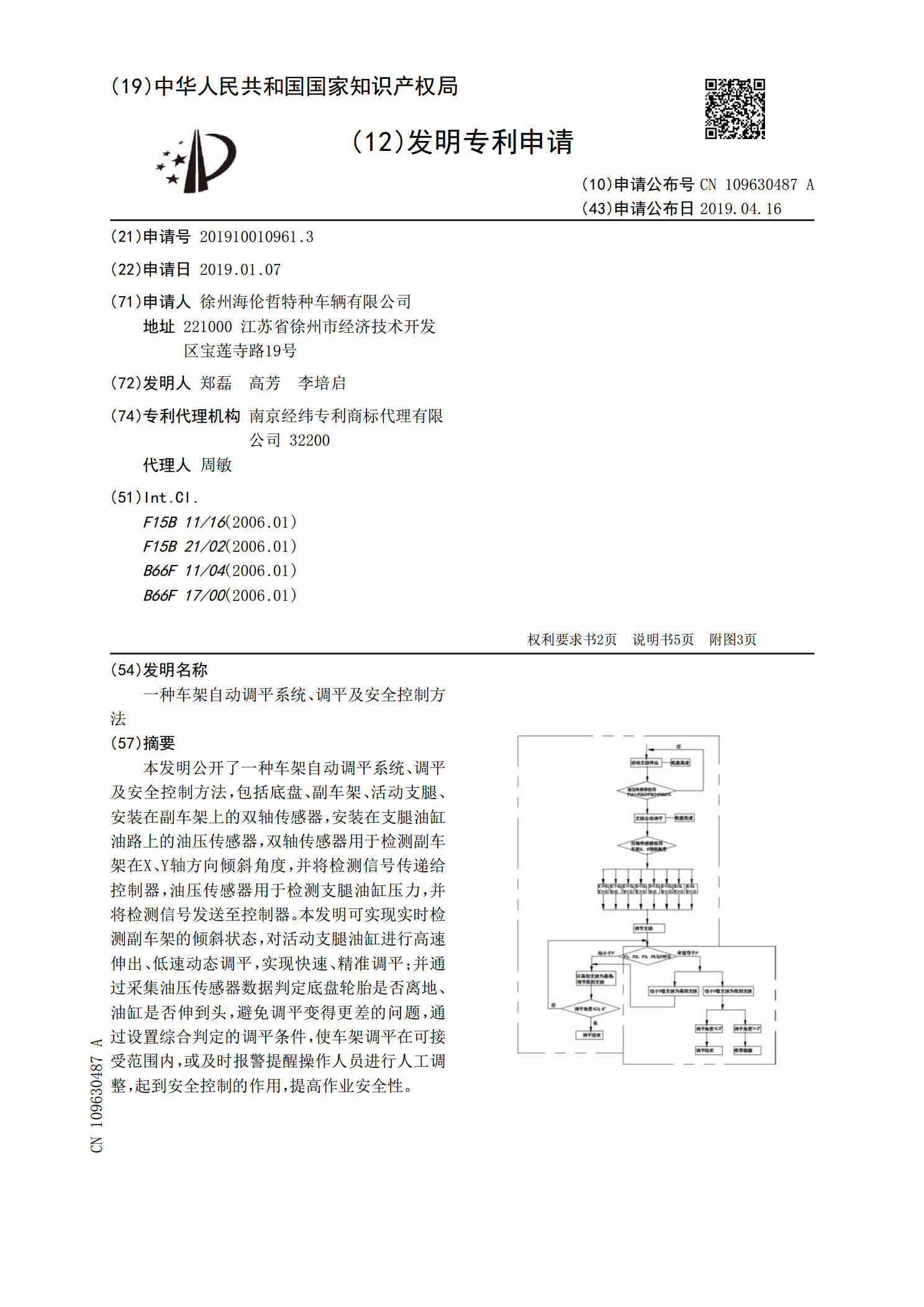
本发明公开了一种车架自动调平系统、调平及安全控制方法,包括底盘、副车架、活动支腿、安装在副车架上的双轴传感器,安装在支腿油缸油路上的油压传感器,双轴传感器用于检测副车架在X、Y轴方向倾斜角度,并将检测信号传递给控制器,油压传感器用于检测支腿油缸压力,并将检测信号发送至控制器。本发明可实现实时检测副车架的倾斜状态,对活动支腿油缸进行高速伸出、低速动态调平,实现快速、精准调平;并通过采集油压传感器数据判定底盘轮胎是否离地、油缸是否伸到头,避免调平变得更差的问题,通过设置综合判定的调平条件,使车架调平在可接受范

一种车身姿态控制系统.pdf
本发明涉及一种车身姿态控制系统。该车身姿态控制系统包括陀螺仪传感器,用于获取第一运动信号,第一运动信号包括车身在X/Y/Z轴方向上的加速度和角速度信号;轮端加速度传感器,用于获取第二运动信号,第二运动信号包括车轮的加速度信号;多个阻尼减振器,用于控制车身姿态;系统控制器ECU,包括姿态解算模块、悬架状态计算模块和悬架主控算法模块,姿态解算模块根据第一运动信号获得车身运动状态信息和车身点运动状态信息,悬架状态计算模块根据第二运动信号和车身点运动状态信息以获得悬架运动状态信息,悬架主控算法模块根据车身运动状态