
一种敏捷小卫星姿态快速机动控制方法.pdf

音景****ka


1/10
2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种敏捷小卫星姿态快速机动控制方法.pdf
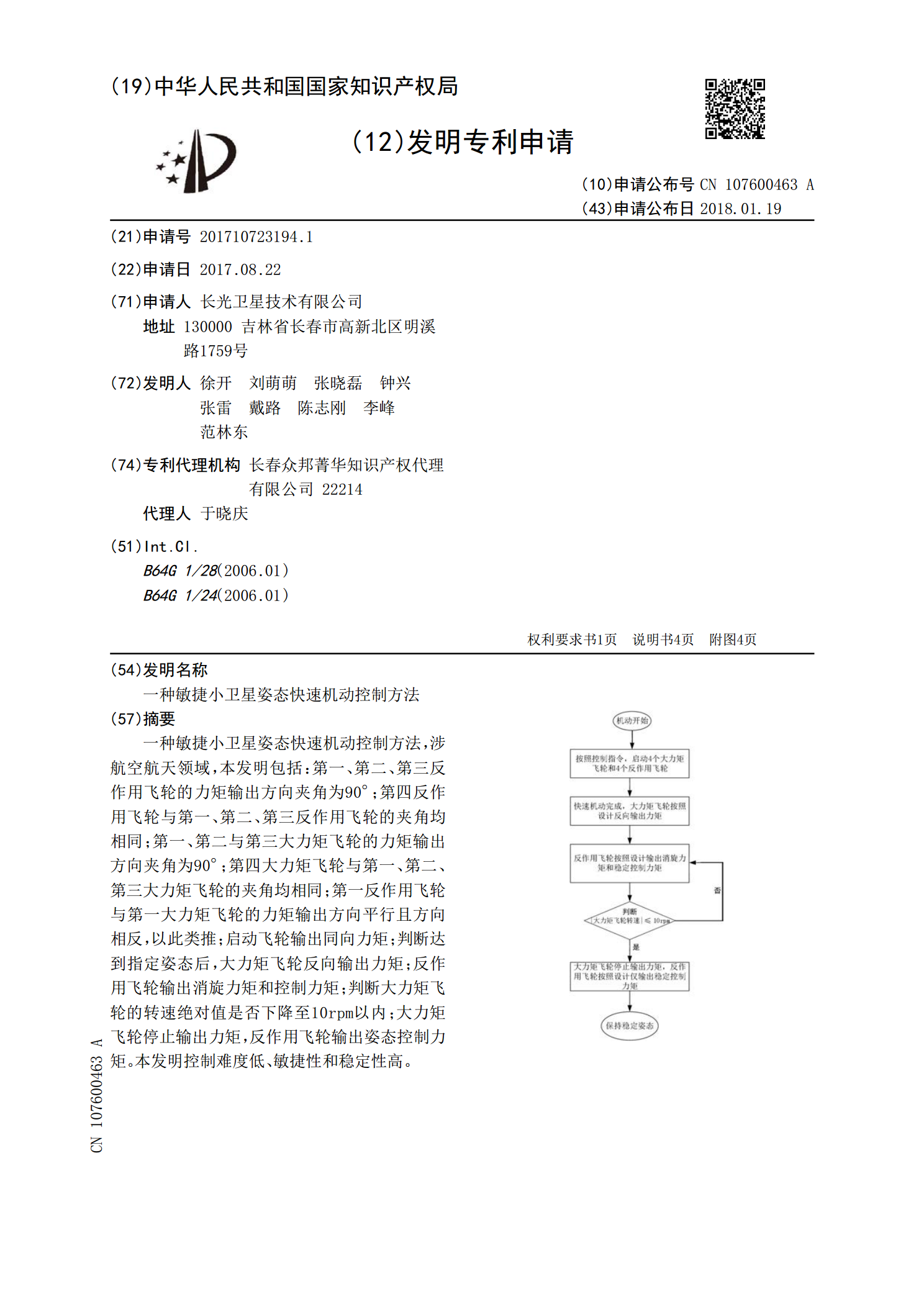
一种敏捷小卫星姿态快速机动控制方法,涉航空航天领域,本发明包括:第一、第二、第三反作用飞轮的力矩输出方向夹角为90°;第四反作用飞轮与第一、第二、第三反作用飞轮的夹角均相同;第一、第二与第三大力矩飞轮的力矩输出方向夹角为90°;第四大力矩飞轮与第一、第二、第三大力矩飞轮的夹角均相同;第一反作用飞轮与第一大力矩飞轮的力矩输出方向平行且方向相反,以此类推;启动飞轮输出同向力矩;判断达到指定姿态后,大力矩飞轮反向输出力矩;反作用飞轮输出消旋力矩和控制力矩;判断大力矩飞轮的转速绝对值是否下降至10rpm以内;大力

复杂卫星快速机动时的姿态控制工程.docx
复杂卫星快速机动时的姿态控制工程标题:复杂卫星快速机动时的姿态控制工程摘要:随着卫星技术的不断发展,卫星的任务越来越复杂,需要实现更精确的机动能力。本文针对复杂卫星快速机动时的姿态控制问题进行研究,分析了姿态控制的重要性和挑战。然后,从传统控制方法到现代控制方法的发展,介绍了一些常用的姿态控制技术。最后,提出了一种基于模型预测控制的姿态控制方案,并通过数值仿真验证算法的有效性。一、引言随着卫星技术的不断发展,卫星的任务越来越复杂,需要实现更精确的机动能力。卫星的姿态控制是保证其正常运行的重要基础。复杂卫星

基于力矩陀螺的高分敏捷小卫星姿态机动控制研究.docx
基于力矩陀螺的高分敏捷小卫星姿态机动控制研究标题:基于力矩陀螺的高分辨率敏捷小卫星姿态机动控制研究摘要:小卫星作为现代航天技术发展的重要组成部分,具有成本低、开发周期短、可灵活组网等优势。然而,小卫星的姿态控制问题一直是限制其应用范围和性能提升的瓶颈之一。本文针对小卫星的姿态机动控制问题,提出了一种基于力矩陀螺技术的策略。通过文献综述和实验验证,本研究证明了力矩陀螺在提高小卫星姿态机动控制精度和稳定性方面的潜力。本文对小卫星姿态机动控制方案的设计和优化进行了详细的描述,并提出了一种有效的控制算法。实验结果

基于路径规划的敏捷卫星姿态机动反馈控制方法.docx
基于路径规划的敏捷卫星姿态机动反馈控制方法摘要卫星姿态机动控制是实现卫星在轨姿态控制的重要手段,针对卫星姿态控制中路径规划和反馈控制的相关问题,本文提出了基于路径规划的敏捷卫星姿态机动反馈控制方法。首先介绍了卫星姿态机动控制的背景和意义,然后分析了卫星姿态机动控制中存在的路径规划和反馈控制问题,并提出了基于路径规划的敏捷姿态机动控制方法以及反馈控制方法。最后,通过数值实验验证了本文提出的方法的可行性和有效性。关键词:卫星姿态机动、路径规划、反馈控制、敏捷姿态控制、数值实验一、引言随着卫星技术的快速发展,遥

敏捷遥感卫星新型姿态控制精度评估方法.docx
敏捷遥感卫星新型姿态控制精度评估方法随着卫星技术的不断发展和应用,卫星的精度、分辨率、精度要求越来越高。而对于具有高分辨率和高精度要求的敏捷遥感卫星,姿态控制是保证其工作精度和质量的关键因素。因此,如何评估和提高敏捷遥感卫星的姿态控制精度显得尤为重要。敏捷遥感卫星是一种高分辨率卫星,其主要任务是在不同方向和角度上拍摄地球表面影像,能够提供高质量、高精度的地球观测数据。为保证敏捷遥感卫星能够准确地拍摄影像,必须保持卫星的精确姿态控制,其中包括卫星定位、姿态角度、速率和加速度等参数的控制。因此,评估和提高敏捷