
用于控制道路车辆队列的方法和道路车辆队列.pdf

An****70

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于控制道路车辆队列的方法和道路车辆队列.pdf
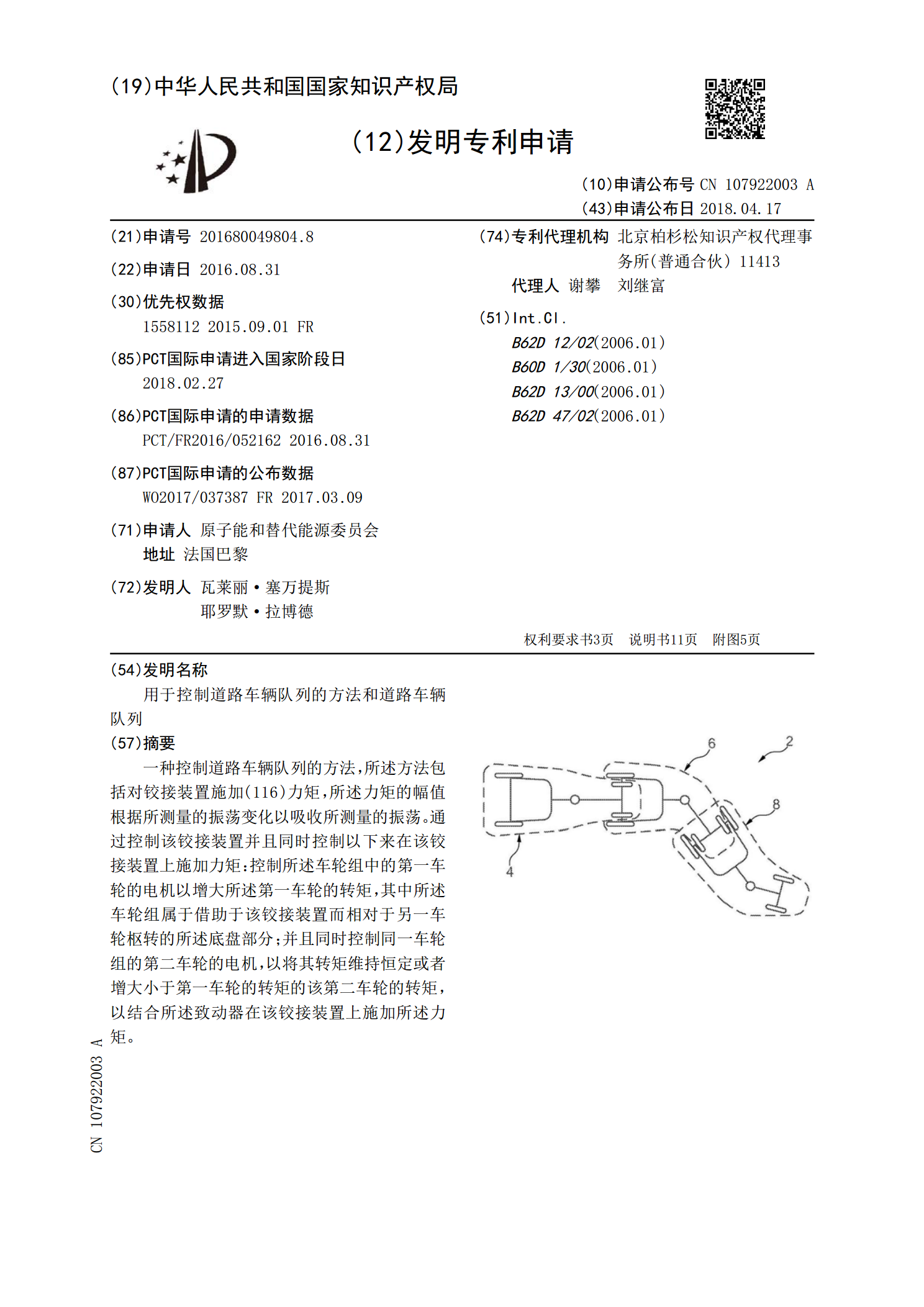
一种控制道路车辆队列的方法,所述方法包括对铰接装置施加(116)力矩,所述力矩的幅值根据所测量的振荡变化以吸收所测量的振荡。通过控制该铰接装置并且同时控制以下来在该铰接装置上施加力矩:控制所述车轮组中的第一车轮的电机以增大所述第一车轮的转矩,其中所述车轮组属于借助于该铰接装置而相对于另一车轮枢转的所述底盘部分;并且同时控制同一车轮组的第二车轮的电机,以将其转矩维持恒定或者增大小于第一车轮的转矩的该第二车轮的转矩,以结合所述致动器在该铰接装置上施加所述力矩。
用于控制车辆队列行驶的装置和方法.pdf
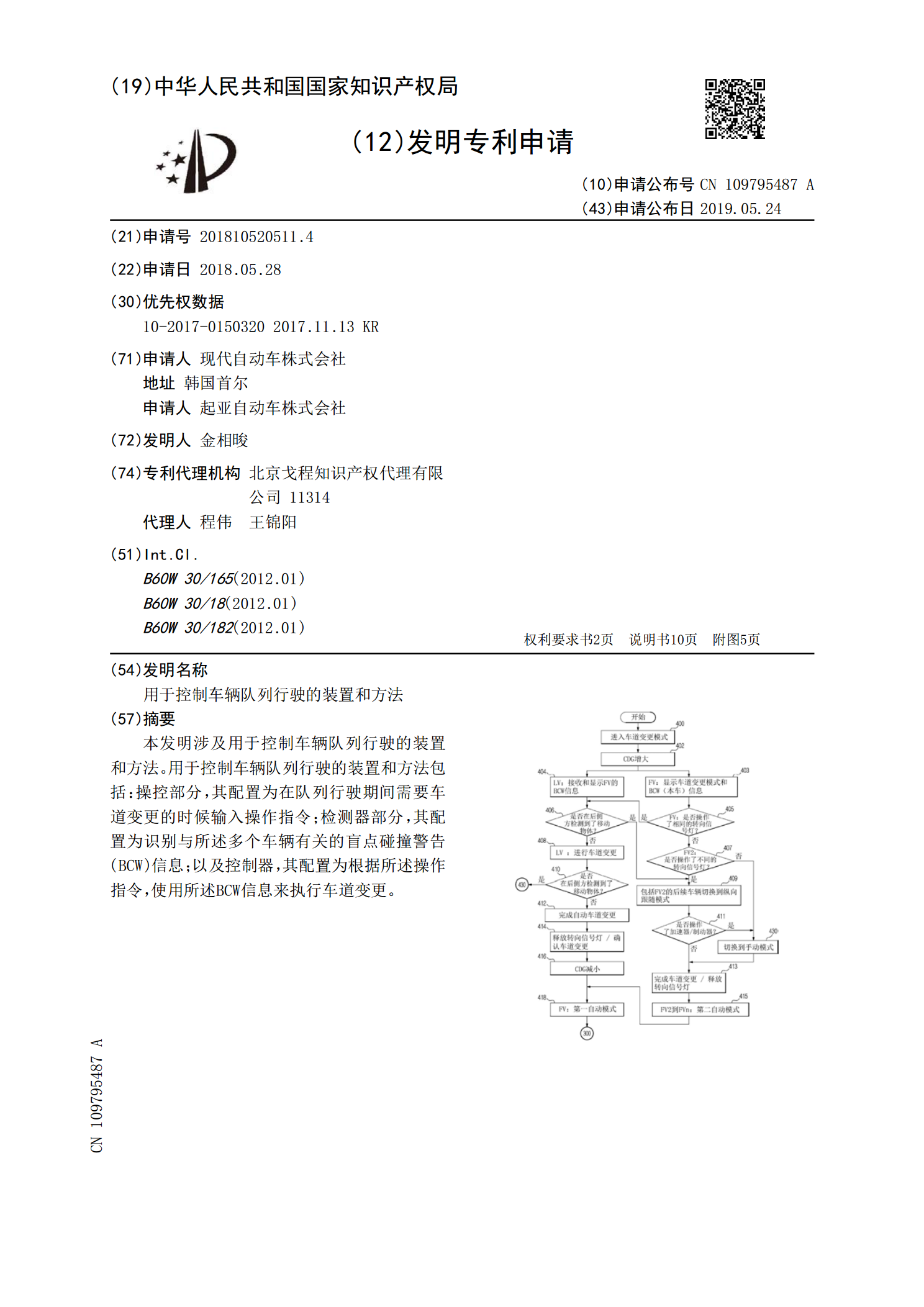
本发明涉及用于控制车辆队列行驶的装置和方法。用于控制车辆队列行驶的装置和方法包括:操控部分,其配置为在队列行驶期间需要车道变更的时候输入操作指令;检测器部分,其配置为识别与所述多个车辆有关的盲点碰撞警告(BCW)信息;以及控制器,其配置为根据所述操作指令,使用所述BCW信息来执行车道变更。
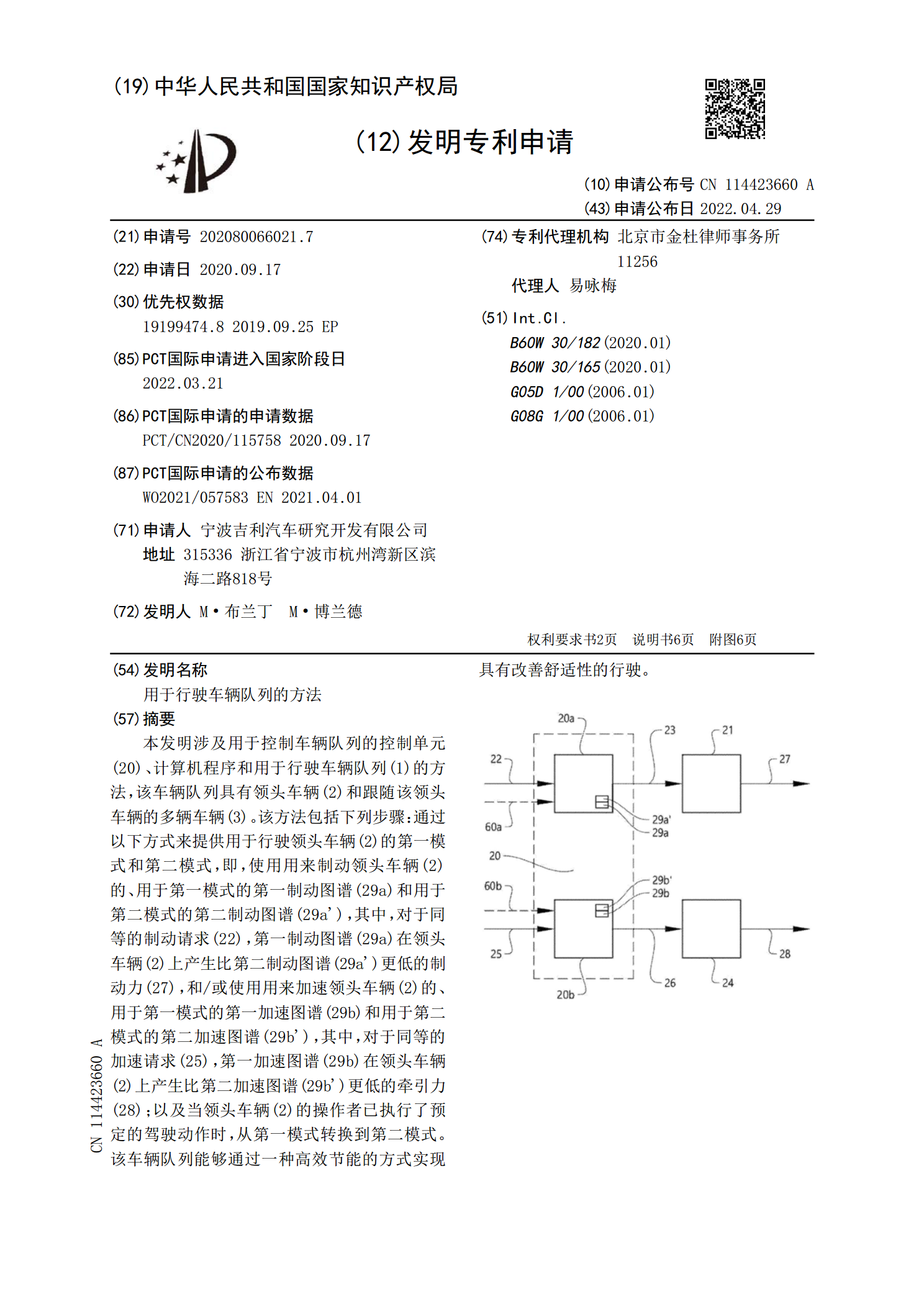
用于行驶车辆队列的方法.pdf
本发明涉及用于控制车辆队列的控制单元(20)、计算机程序和用于行驶车辆队列(1)的方法,该车辆队列具有领头车辆(2)和跟随该领头车辆的多辆车辆(3)。该方法包括下列步骤:通过以下方式来提供用于行驶领头车辆(2)的第一模式和第二模式,即,使用用来制动领头车辆(2)的、用于第一模式的第一制动图谱(29a)和用于第二模式的第二制动图谱(29a’),其中,对于同等的制动请求(22),第一制动图谱(29a)在领头车辆(2)上产生比第二制动图谱(29a’)更低的制动力(27),和/或使用用来加速领头车辆(2)的、用于
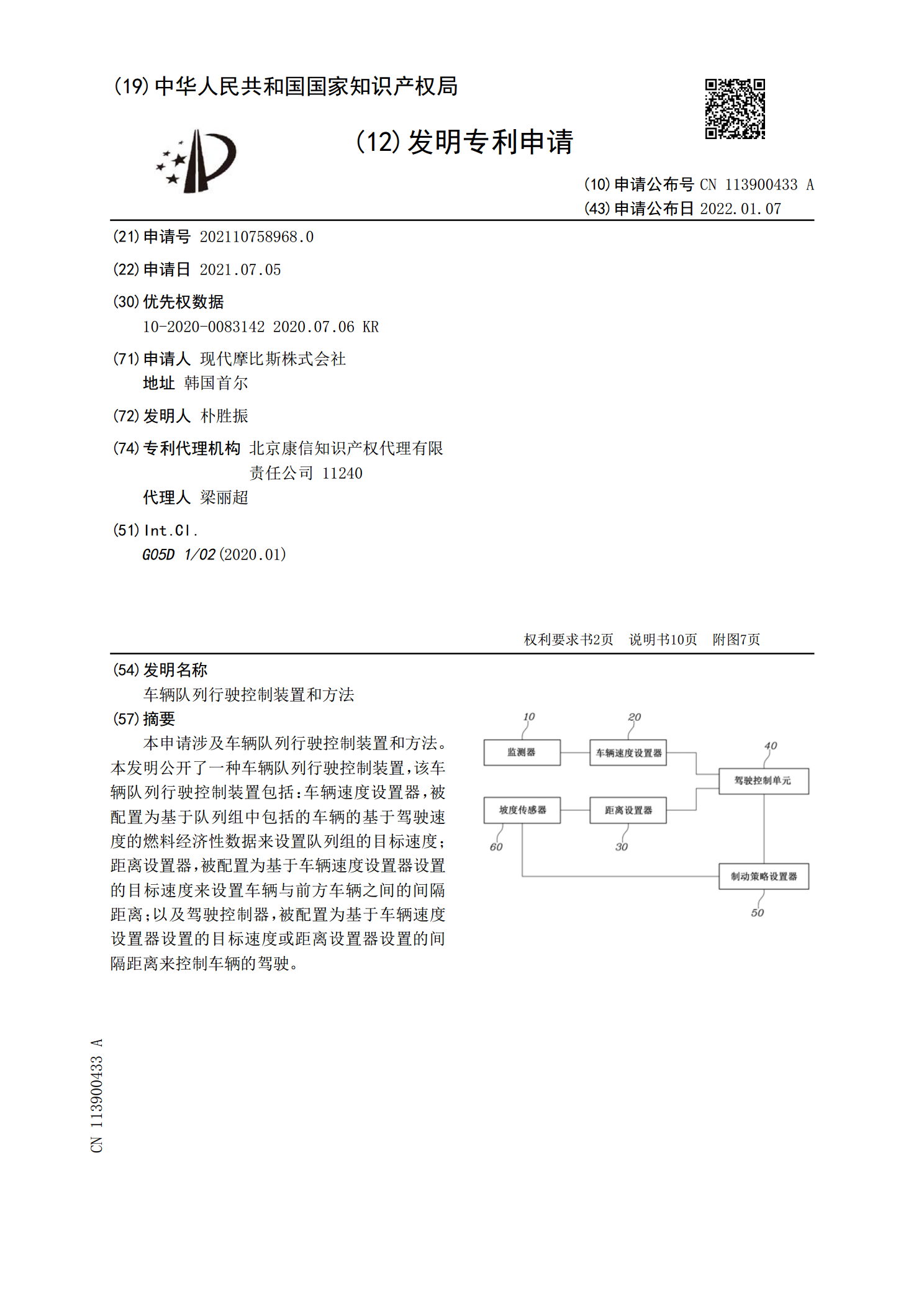
车辆队列行驶控制装置和方法.pdf
本申请涉及车辆队列行驶控制装置和方法。本发明公开了一种车辆队列行驶控制装置,该车辆队列行驶控制装置包括:车辆速度设置器,被配置为基于队列组中包括的车辆的基于驾驶速度的燃料经济性数据来设置队列组的目标速度;距离设置器,被配置为基于车辆速度设置器设置的目标速度来设置车辆与前方车辆之间的间隔距离;以及驾驶控制器,被配置为基于车辆速度设置器设置的目标速度或距离设置器设置的间隔距离来控制车辆的驾驶。
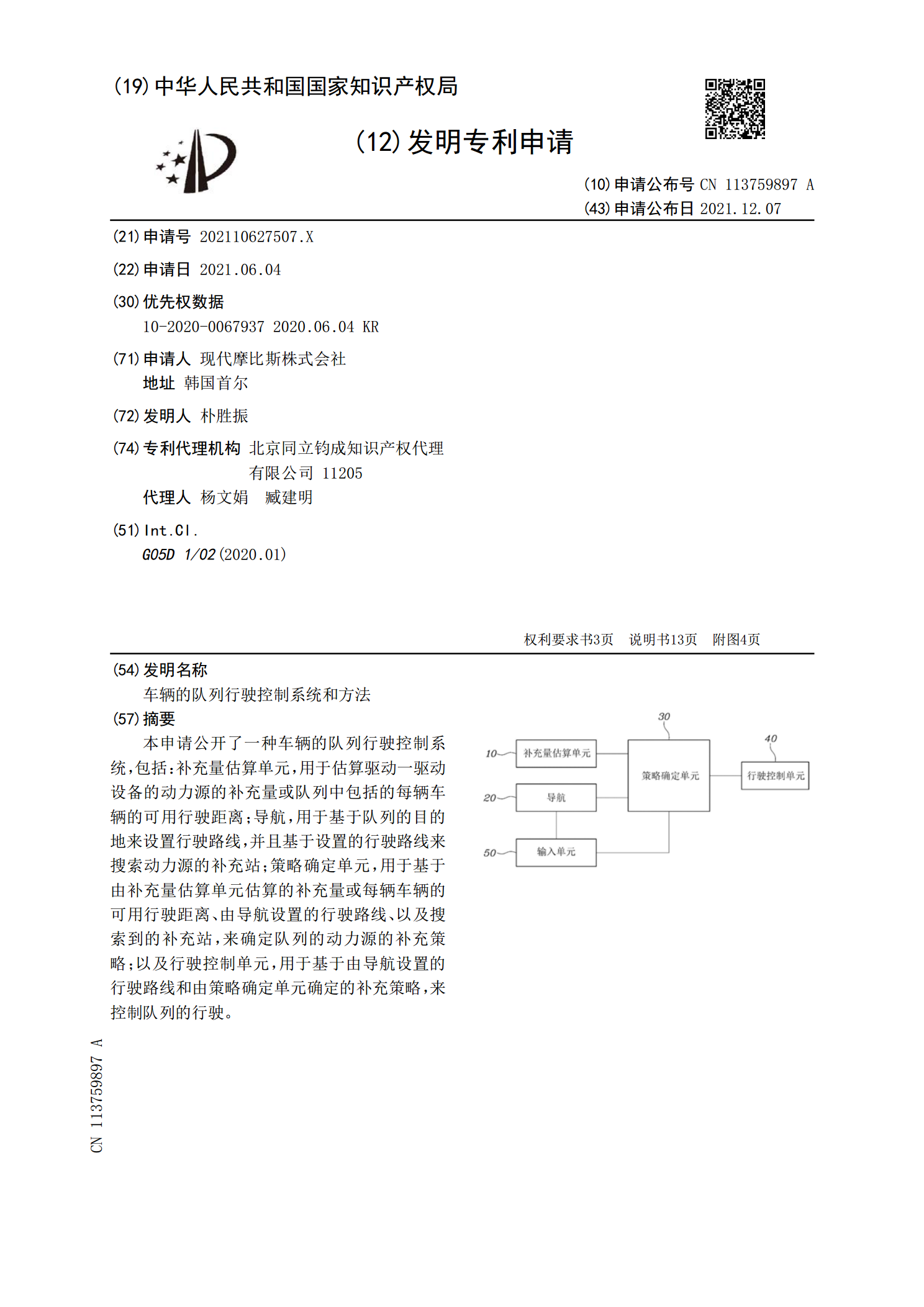
车辆的队列行驶控制系统和方法.pdf
本申请公开了一种车辆的队列行驶控制系统,包括:补充量估算单元,用于估算驱动一驱动设备的动力源的补充量或队列中包括的每辆车辆的可用行驶距离;导航,用于基于队列的目的地来设置行驶路线,并且基于设置的行驶路线来搜索动力源的补充站;策略确定单元,用于基于由补充量估算单元估算的补充量或每辆车辆的可用行驶距离、由导航设置的行驶路线、以及搜索到的补充站,来确定队列的动力源的补充策略;以及行驶控制单元,用于基于由导航设置的行驶路线和由策略确定单元确定的补充策略,来控制队列的行驶。