
一种取料机械手.pdf

一吃****瀚文

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种取料机械手.pdf
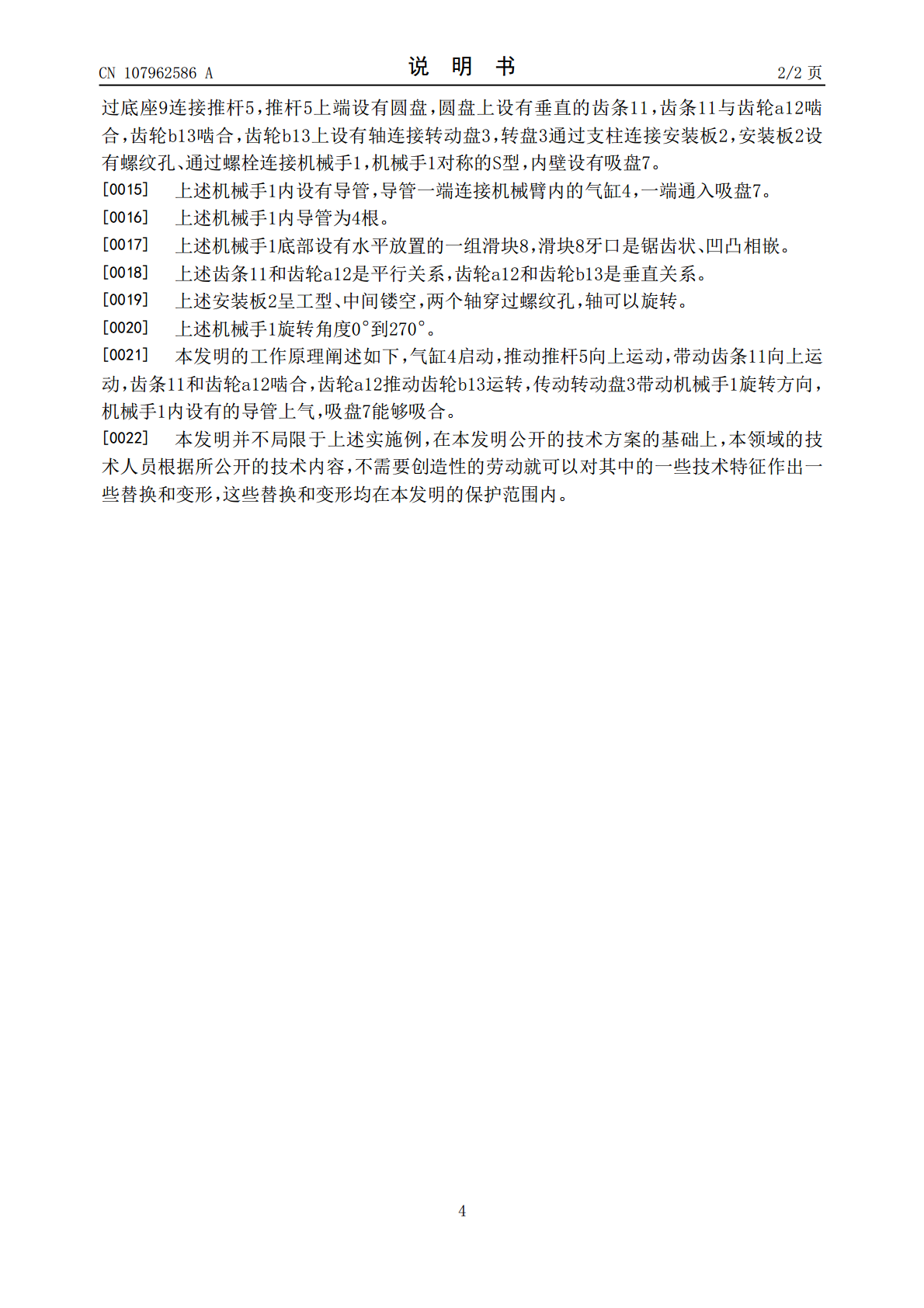
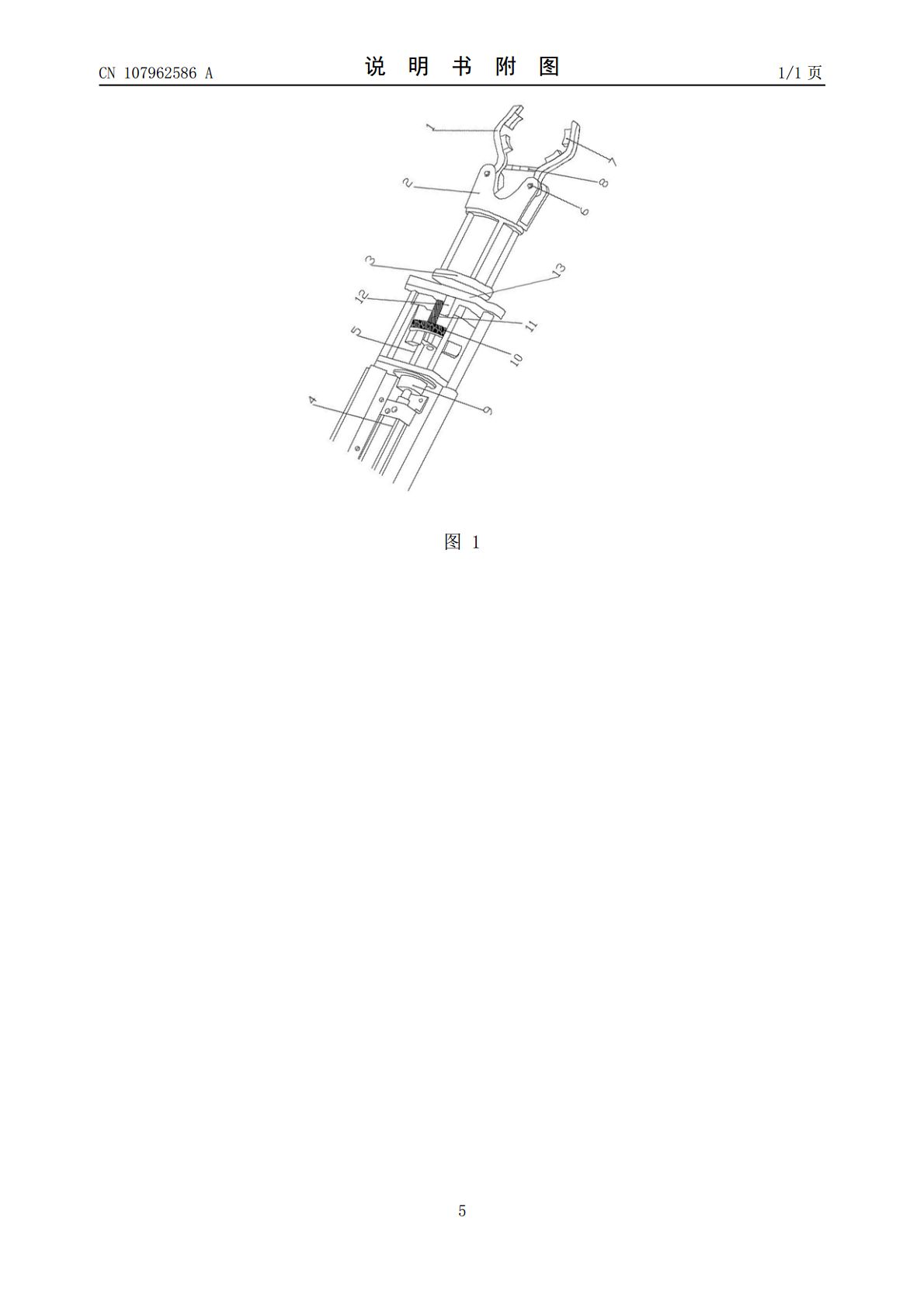
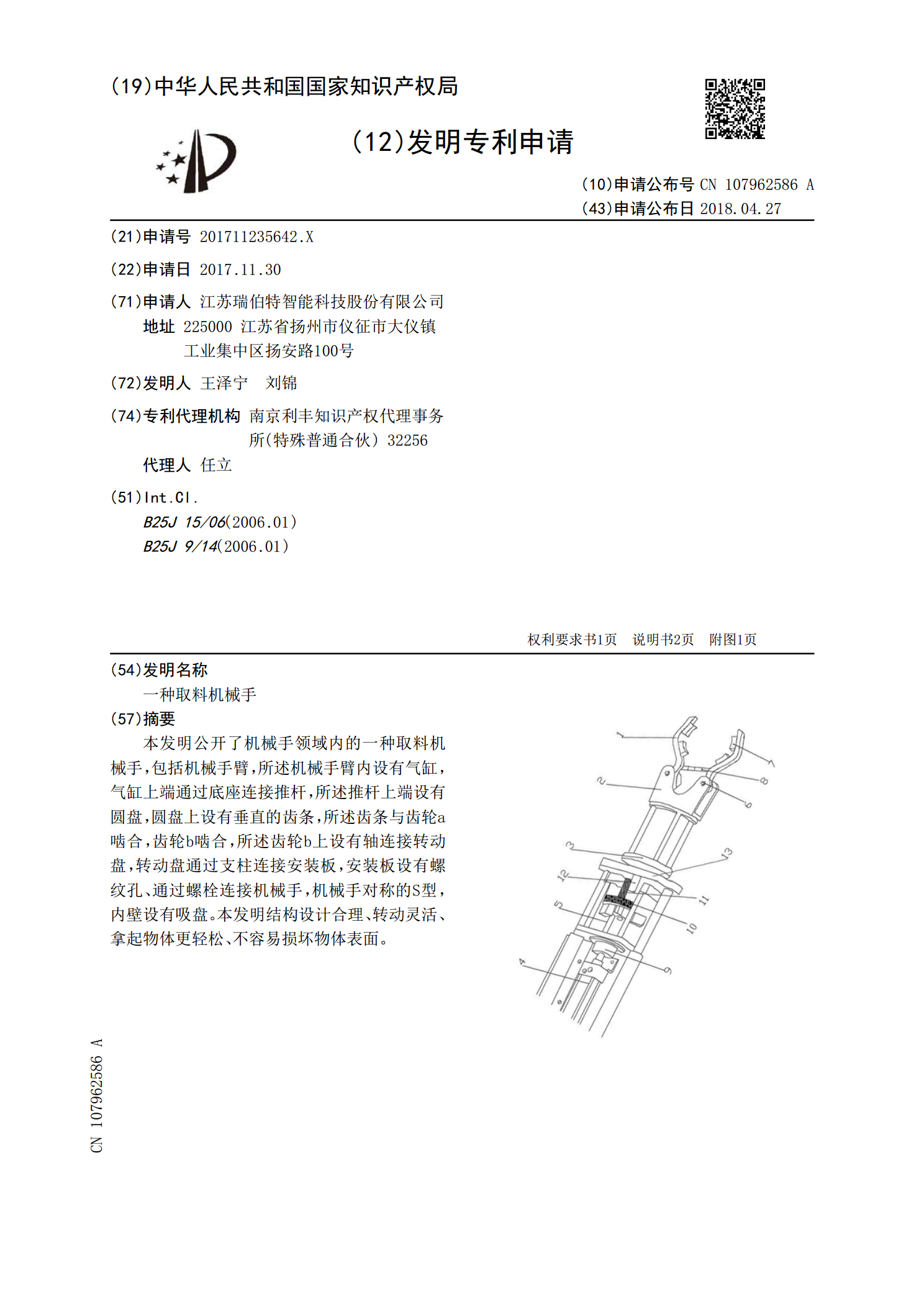
本发明公开了机械手领域内的一种取料机械手,包括机械手臂,所述机械手臂内设有气缸,气缸上端通过底座连接推杆,所述推杆上端设有圆盘,圆盘上设有垂直的齿条,所述齿条与齿轮a啮合,齿轮b啮合,所述齿轮b上设有轴连接转动盘,转动盘通过支柱连接安装板,安装板设有螺纹孔、通过螺栓连接机械手,机械手对称的S型,内壁设有吸盘。本发明结构设计合理、转动灵活、拿起物体更轻松、不容易损坏物体表面。
一种取放料机械手.pdf
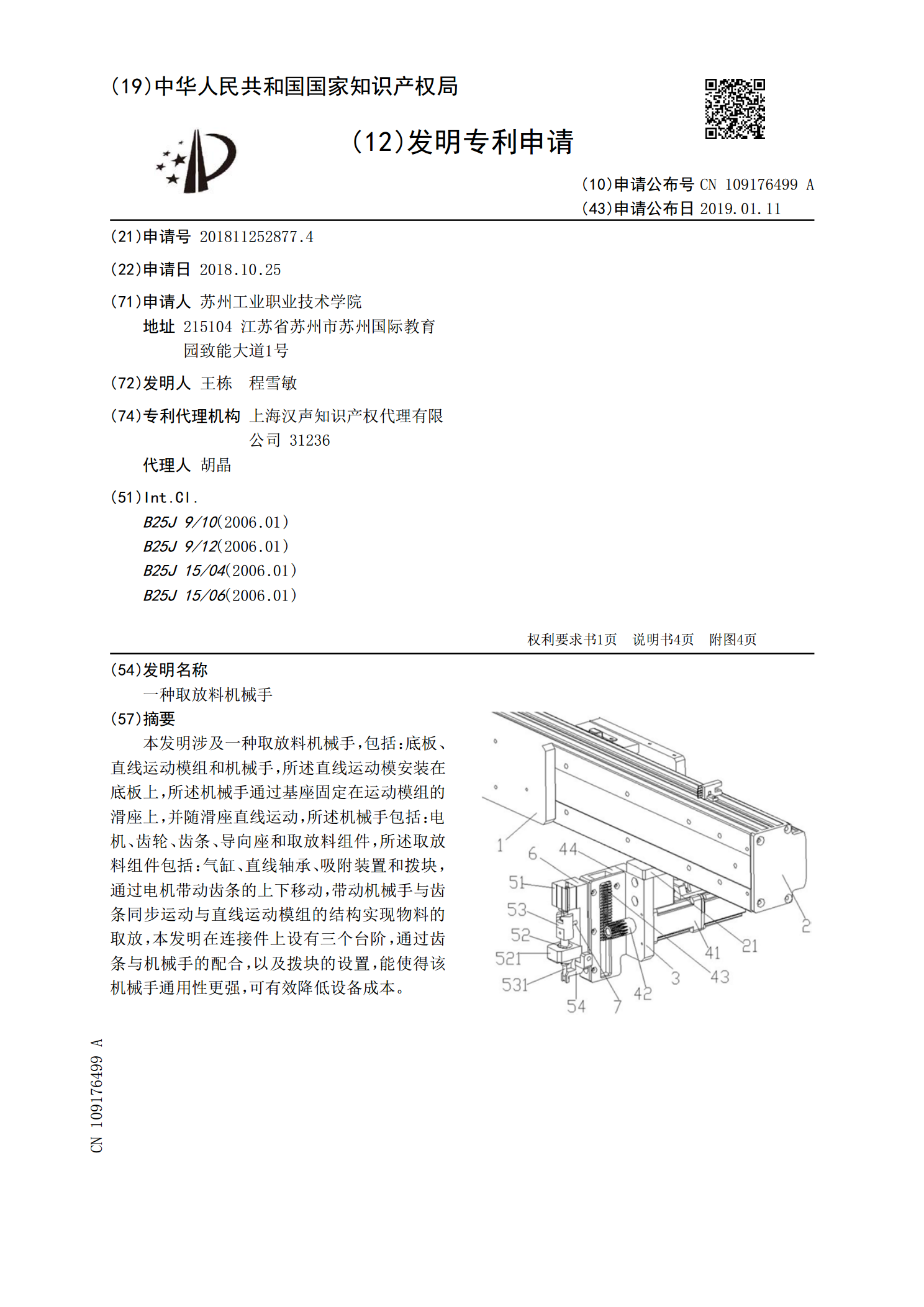
本发明涉及一种取放料机械手,包括:底板、直线运动模组和机械手,所述直线运动模安装在底板上,所述机械手通过基座固定在运动模组的滑座上,并随滑座直线运动,所述机械手包括:电机、齿轮、齿条、导向座和取放料组件,所述取放料组件包括:气缸、直线轴承、吸附装置和拨块,通过电机带动齿条的上下移动,带动机械手与齿条同步运动与直线运动模组的结构实现物料的取放,本发明在连接件上设有三个台阶,通过齿条与机械手的配合,以及拨块的设置,能使得该机械手通用性更强,可有效降低设备成本。
一种旋转取料机械手.pdf
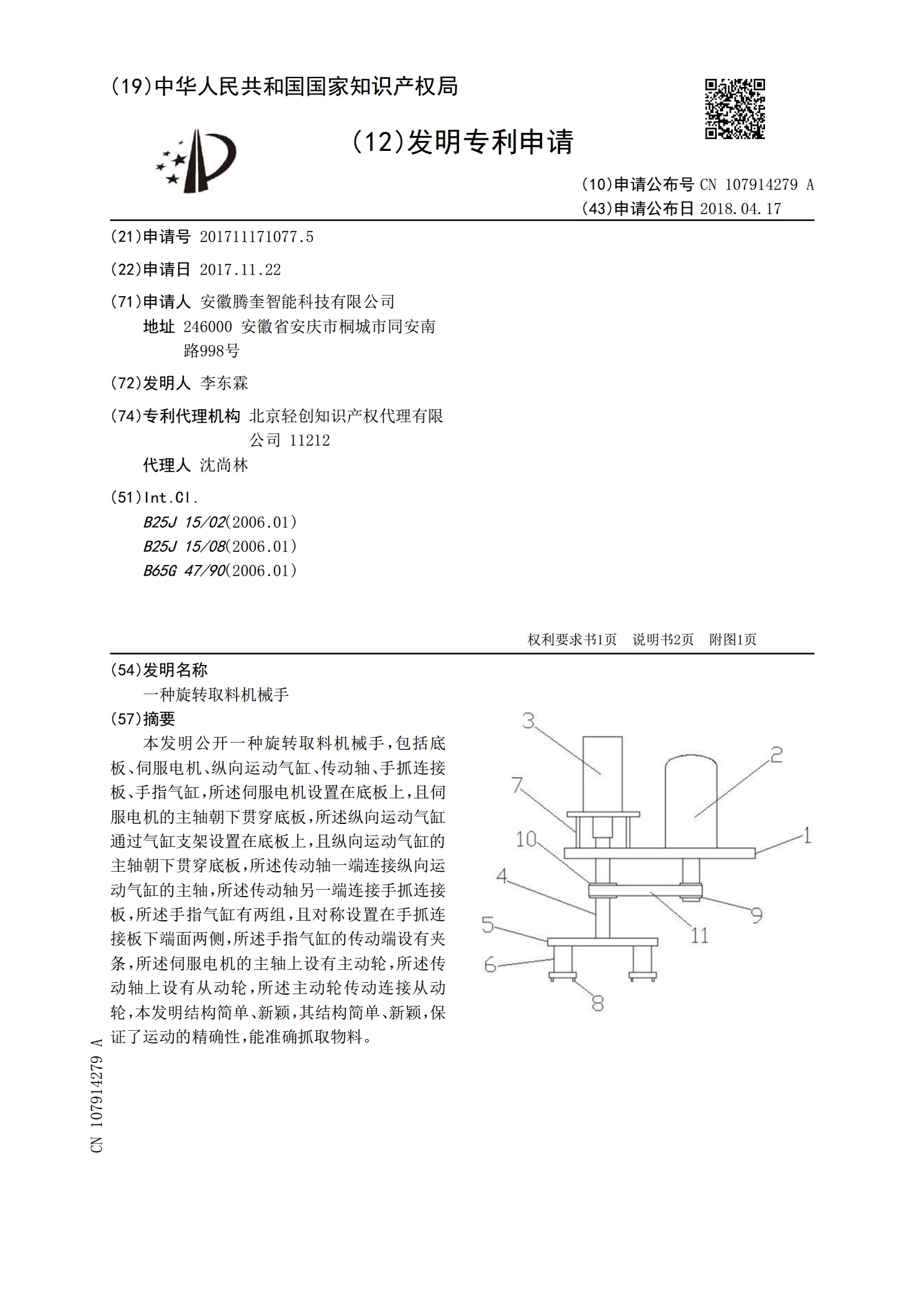
本发明公开一种旋转取料机械手,包括底板、伺服电机、纵向运动气缸、传动轴、手抓连接板、手指气缸,所述伺服电机设置在底板上,且伺服电机的主轴朝下贯穿底板,所述纵向运动气缸通过气缸支架设置在底板上,且纵向运动气缸的主轴朝下贯穿底板,所述传动轴一端连接纵向运动气缸的主轴,所述传动轴另一端连接手抓连接板,所述手指气缸有两组,且对称设置在手抓连接板下端面两侧,所述手指气缸的传动端设有夹条,所述伺服电机的主轴上设有主动轮,所述传动轴上设有从动轮,所述主动轮传动连接从动轮,本发明结构简单、新颖,其结构简单、新颖,保证了运
一种注塑取料机械手.pdf
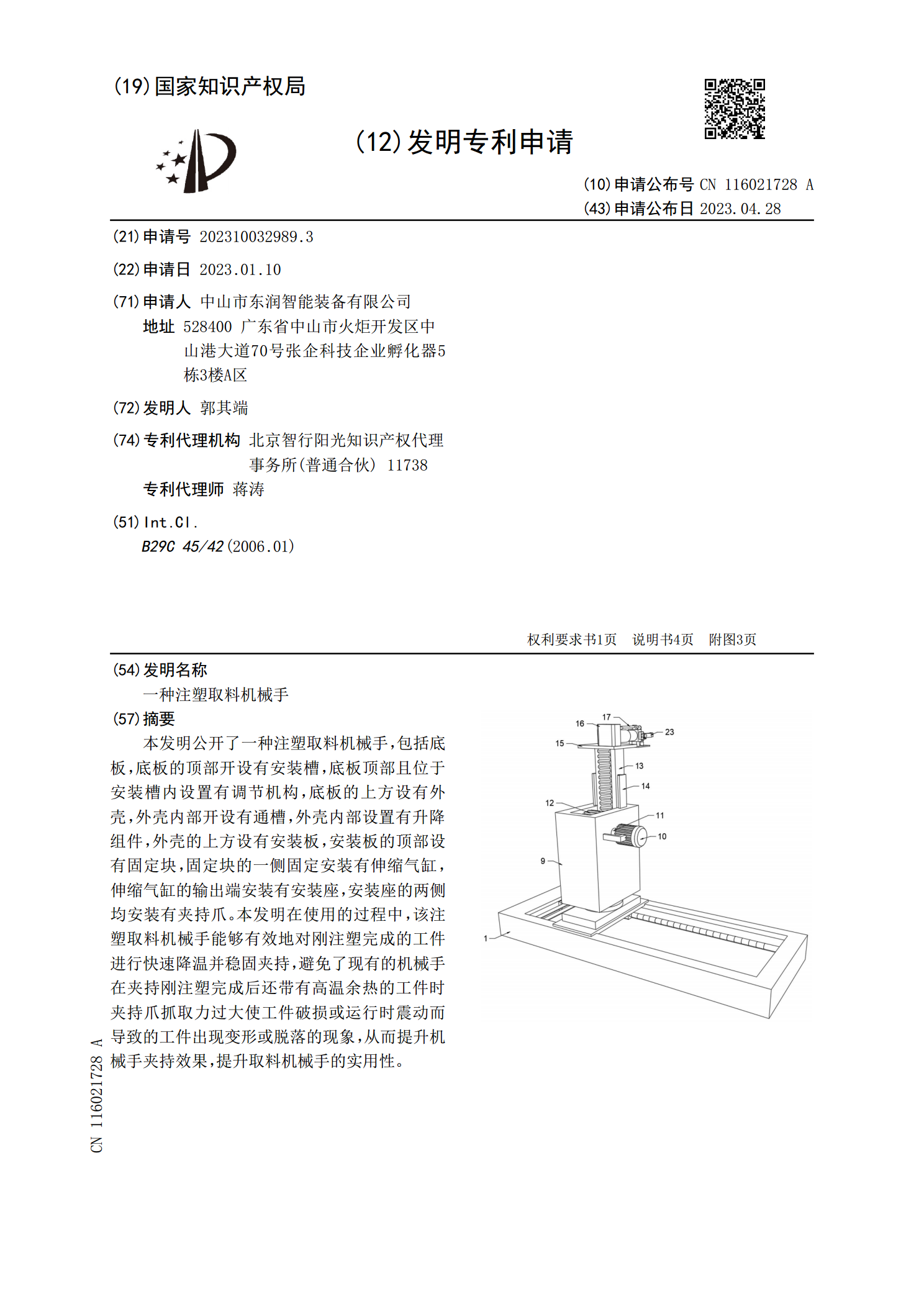
本发明公开了一种注塑取料机械手,包括底板,底板的顶部开设有安装槽,底板顶部且位于安装槽内设置有调节机构,底板的上方设有外壳,外壳内部开设有通槽,外壳内部设置有升降组件,外壳的上方设有安装板,安装板的顶部设有固定块,固定块的一侧固定安装有伸缩气缸,伸缩气缸的输出端安装有安装座,安装座的两侧均安装有夹持爪。本发明在使用的过程中,该注塑取料机械手能够有效地对刚注塑完成的工件进行快速降温并稳固夹持,避免了现有的机械手在夹持刚注塑完成后还带有高温余热的工件时夹持爪抓取力过大使工件破损或运行时震动而导致的工件出现变形

一种装料取料机械手.pdf
一种装料取料机械手,它是在底座上安装一个由齿轮箱驱动的、可以旋转的托架,托架上面铰接一平行四边形连杆机构,平行四边形连杆机构由汽缸驱动升降的的机构实现的。本发明具有结构简单,可以轻取轻放,适合于薄壁、易碎、非导磁、不规则等工件的装料与取料。