
一种监控车辆行驶状态的方法、系统及车辆.pdf

一吃****海逸


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种监控车辆行驶状态的方法、系统及车辆.pdf
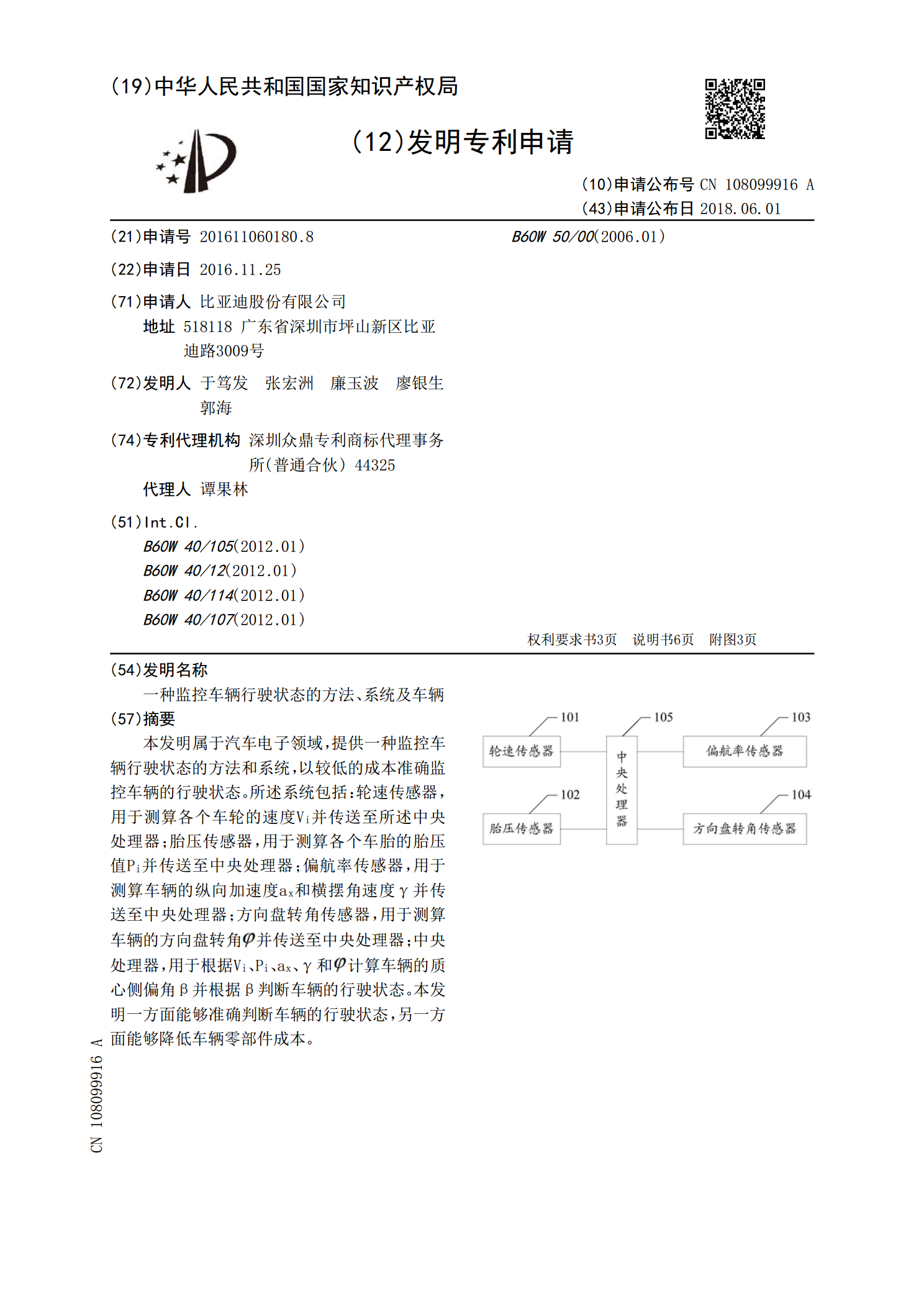
本发明属于汽车电子领域,提供一种监控车辆行驶状态的方法和系统,以较低的成本准确监控车辆的行驶状态。所述系统包括:轮速传感器,用于测算各个车轮的速度V
车辆行驶状态监控方法及装置.pdf
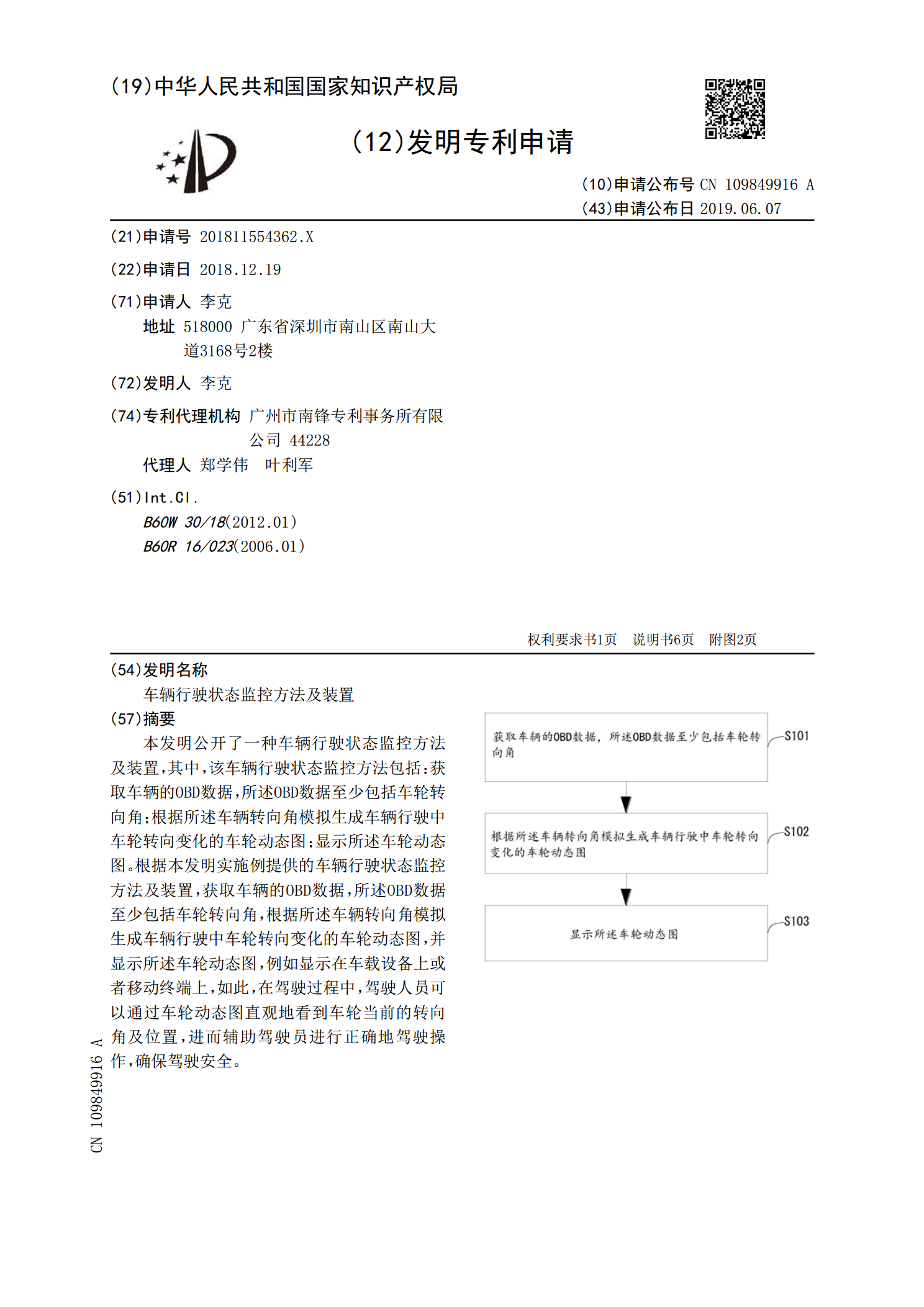
本发明公开了一种车辆行驶状态监控方法及装置,其中,该车辆行驶状态监控方法包括:获取车辆的OBD数据,所述OBD数据至少包括车轮转向角;根据所述车辆转向角模拟生成车辆行驶中车轮转向变化的车轮动态图;显示所述车轮动态图。根据本发明实施例提供的车辆行驶状态监控方法及装置,获取车辆的OBD数据,所述OBD数据至少包括车轮转向角,根据所述车辆转向角模拟生成车辆行驶中车轮转向变化的车轮动态图,并显示所述车轮动态图,例如显示在车载设备上或者移动终端上,如此,在驾驶过程中,驾驶人员可以通过车轮动态图直观地看到车轮当前的转

一种车辆信息远程监控系统及其监控车辆状态的方法.pdf
本发明涉及一种车辆信息远程监控系统及其监控车辆状态的方法,该方法包括的步骤为:S01,智能车载终端调取车辆状态信息;S02,智能车载终端判断所述车辆状态信息是否异常;S03,S02中如果是异常,智能车载终端的存储模块留存车辆状态异常信息日志,并通过卫星互联网通信模块发送车辆状态异常信息至车联网数据智能平台;S04,车联网数据智能平台基于车辆状态异常信息确认车辆ID注册信息,并备份车辆状态异常信息,同时将车辆状态异常信息通过卫星互联网发送至智能移动终端;S05,智能移动终端的APP发出警告信息。本发明可实现
一种判断前方车辆行驶状态的方法及系统.pdf
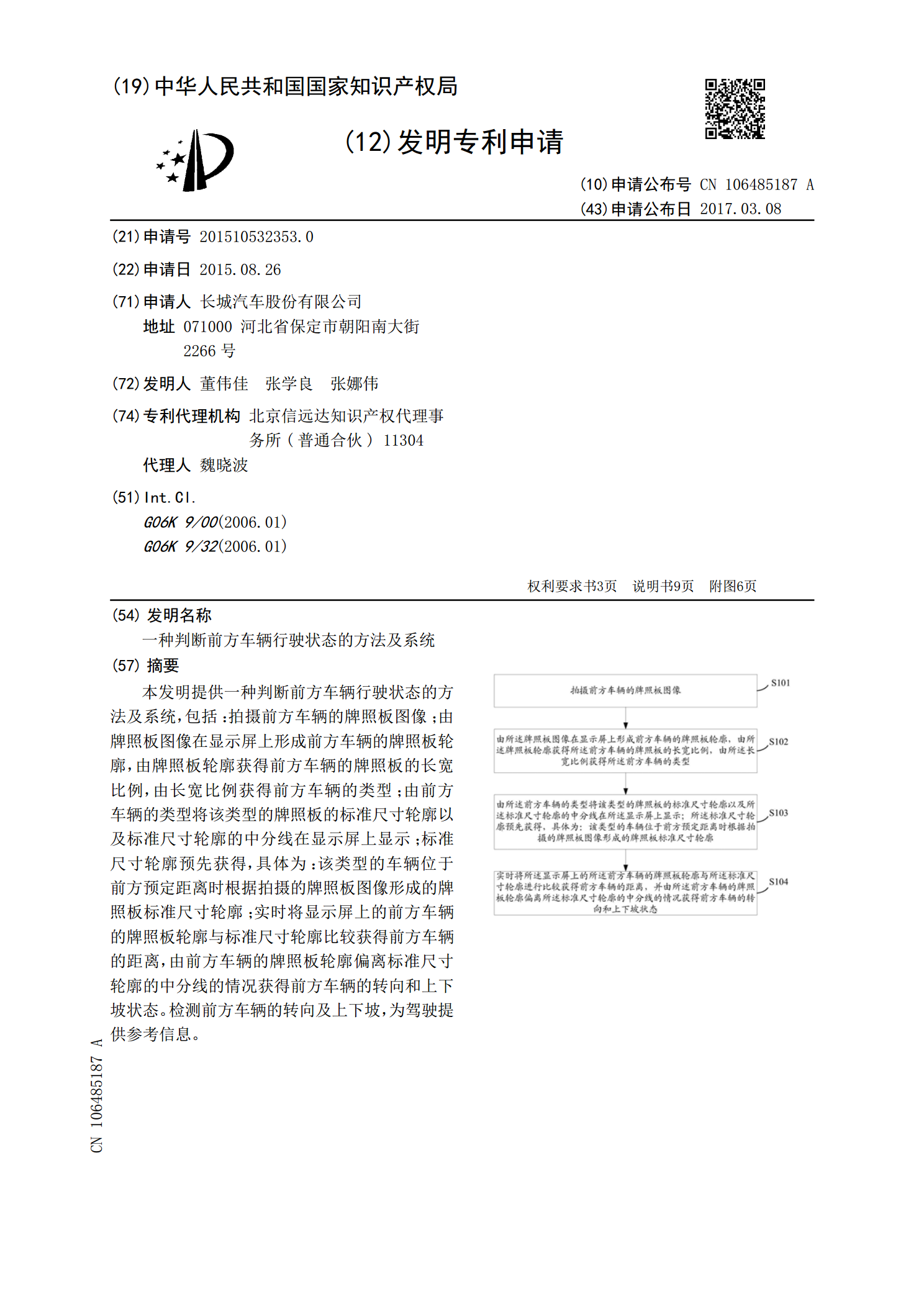
本发明提供一种判断前方车辆行驶状态的方法及系统,包括:拍摄前方车辆的牌照板图像;由牌照板图像在显示屏上形成前方车辆的牌照板轮廓,由牌照板轮廓获得前方车辆的牌照板的长宽比例,由长宽比例获得前方车辆的类型;由前方车辆的类型将该类型的牌照板的标准尺寸轮廓以及标准尺寸轮廓的中分线在显示屏上显示;标准尺寸轮廓预先获得,具体为:该类型的车辆位于前方预定距离时根据拍摄的牌照板图像形成的牌照板标准尺寸轮廓;实时将显示屏上的前方车辆的牌照板轮廓与标准尺寸轮廓比较获得前方车辆的距离,由前方车辆的牌照板轮廓偏离标准尺寸轮廓的中
车辆的行驶状态控制装置以及车辆的行驶状态控制方法.pdf
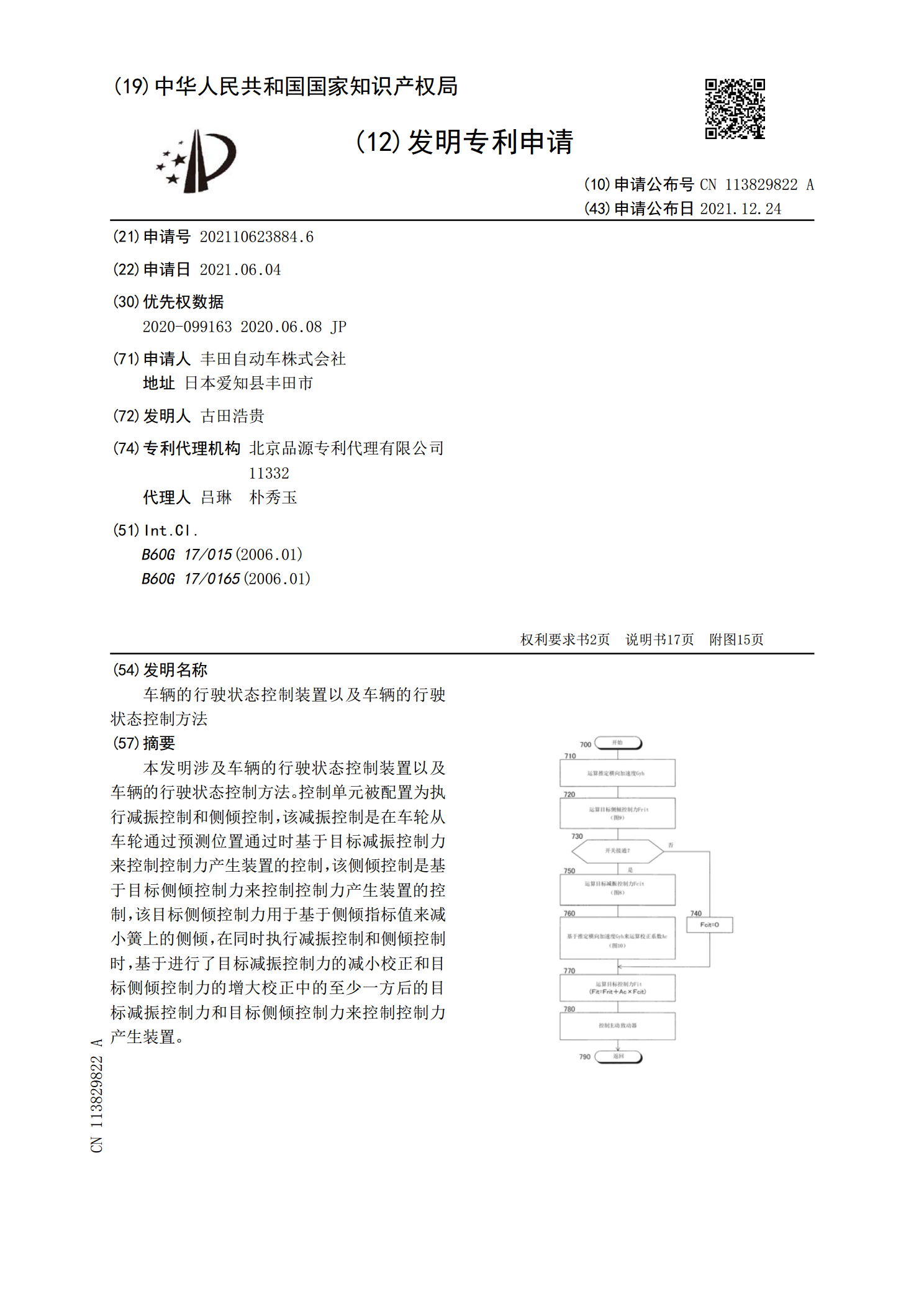
本发明涉及车辆的行驶状态控制装置以及车辆的行驶状态控制方法。控制单元被配置为执行减振控制和侧倾控制,该减振控制是在车轮从车轮通过预测位置通过时基于目标减振控制力来控制控制力产生装置的控制,该侧倾控制是基于目标侧倾控制力来控制控制力产生装置的控制,该目标侧倾控制力用于基于侧倾指标值来减小簧上的侧倾,在同时执行减振控制和侧倾控制时,基于进行了目标减振控制力的减小校正和目标侧倾控制力的增大校正中的至少一方后的目标减振控制力和目标侧倾控制力来控制控制力产生装置。