
一种水下焊接机器人控制装置.pdf

猫巷****永安


1/5

2/5
3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种水下焊接机器人控制装置.pdf
本发明提供一种水下焊接机器人控制装置,包括导轨、控制台和驱动电机,所述导轨呈弧形设置,所述控制台设在导轨上,所述控制台下方设置有槽轮,所述控制台通过槽轮与导轨滑动连接,所述驱动电机设在控制台一侧,所述驱动电机与控制台电性连接,所述控制台上设置有横向执行机构、纵向执行机构和摆动机构,所述驱动电机、横向执行机构、纵向执行机构和摆动机构依次传动连接,所述摆动机构下方设置有焊接机械手,该水下焊接机器人控制装置结构简单,操控方便,非常适合水下管道的焊接,焊接精度高。

一种水下机器人控制装置及方法.pdf
本发明公开了一种水下机器人控制装置,包括控制器、水下机器人,所述水下机器人上固定设置有陀螺仪、过滤器、行走机构,所述陀螺仪的输出端、所述过滤器的输入端分别与所述控制器的输入端相联接,所述控制器的输出端与所述水下机器人的输入端相联接,所述陀螺仪、所述行走机构与所述过滤器分别用来获取所述水下机器人的行走角度、行走位移以及过滤控制。本发明解决了水下机器人作业技术领域的环境监测和水下升降的功能的实现,提高了水下作业的工作效率和环境适应范围,减少了水下救援作业的作业难度;行走机构采用麦克纳姆轮,便于横向、斜向以及转
一种水下钢管焊接机器人.pdf
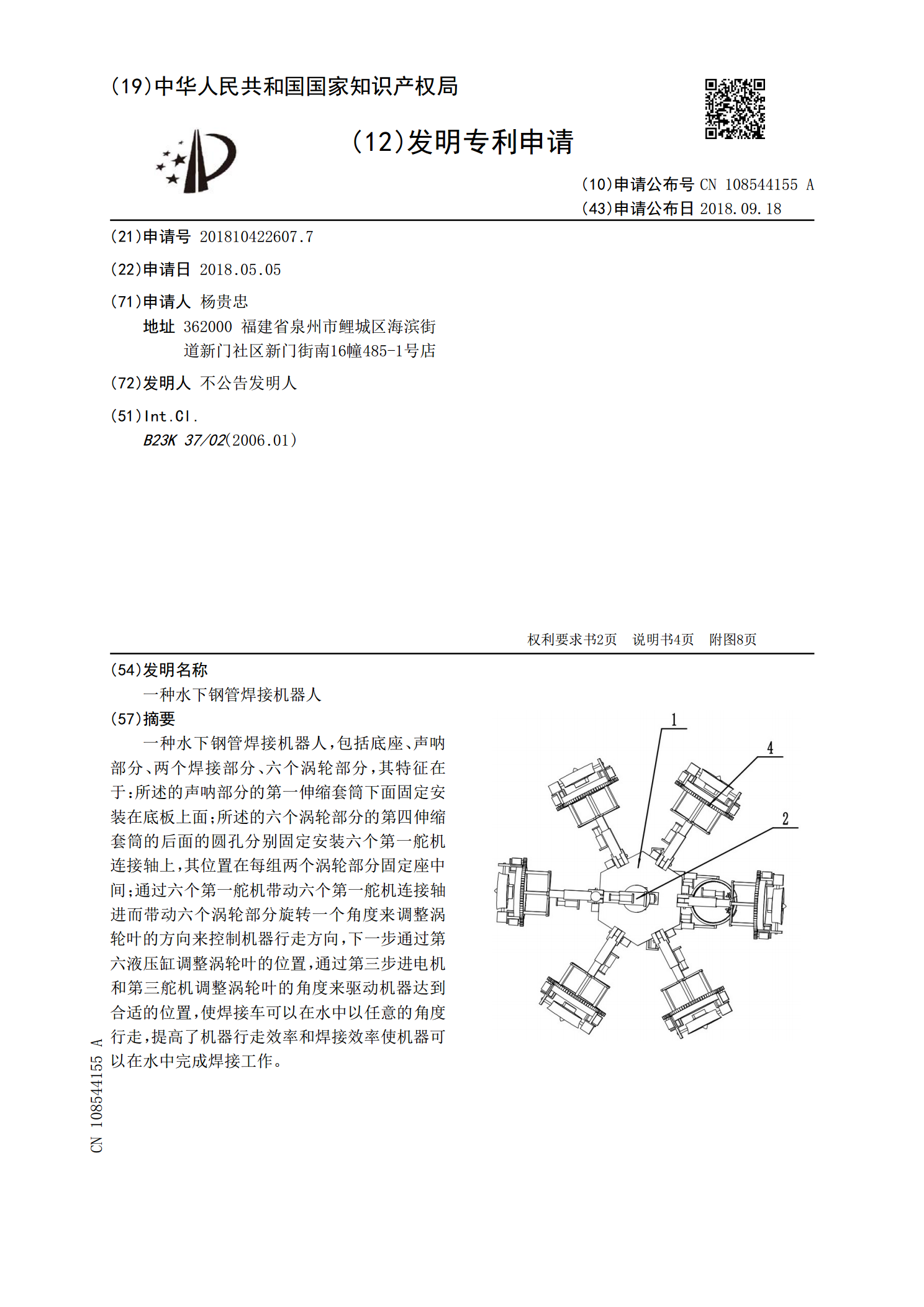
一种水下钢管焊接机器人,包括底座、声呐部分、两个焊接部分、六个涡轮部分,其特征在于:所述的声呐部分的第一伸缩套筒下面固定安装在底板上面;所述的六个涡轮部分的第四伸缩套筒的后面的圆孔分别固定安装六个第一舵机连接轴上,其位置在每组两个涡轮部分固定座中间;通过六个第一舵机带动六个第一舵机连接轴进而带动六个涡轮部分旋转一个角度来调整涡轮叶的方向来控制机器行走方向,下一步通过第六液压缸调整涡轮叶的位置,通过第三步进电机和第三舵机调整涡轮叶的角度来驱动机器达到合适的位置,使焊接车可以在水中以任意的角度行走,提高了机器

一种水下机器人驻留装置及其控制方法.pdf
本发明公开一种水下机器人驻留装置,包括:驻留舱主体和锁紧机构。驻留舱主体内部具有驻留腔,所述驻留舱主体沿长度方向的一端为入口端,所述入口端连通所述驻留腔,所述驻留舱主体沿长度方向的另一端设置限位法兰。锁紧机构设置于所述驻留舱主体上,所述锁紧机构包括多个伸缩部件,各所述伸缩部件沿所述驻留舱主体的圆周方向依次设置,各所述伸缩部件能伸入或伸出所述驻留腔,以夹紧或释放位于驻留腔内的水下机器人。本申请的水下机器人驻留装置结构简单,可靠性高,设计成本低,且提高了水下无人机的锁紧和释放成功率。

一种便携式水下焊接修复装置及焊接修复系统.pdf
本发明公开了一种便携式水下焊接修复装置及焊接修复系统,包括送丝机构、拉丝机构、焊枪、同步控制器和焊接电源,所述焊枪前端为导电嘴,所述送丝机构、拉丝机构和焊枪之间连接绝缘缆,焊丝位于所述绝缘缆内;所述送丝机构包括储装盒,以及设置于储装盒内的送丝盘和焊丝矫正装置,所述送丝盘通过第一信号采集器与同步控制器连接,所述拉丝机构包括承压壳体和设置于承压壳体内的空心电机和十字行星轮,所述空心电机通过第二信号采集器连接同步控制器。本发明所公开的焊接修复装置及焊接修复系统能够实现深水处焊接作业、保证焊接效率和焊接质量。