
一种水下机器人驻留装置及其控制方法.pdf

傲丝****账号

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水下机器人驻留装置及其控制方法.pdf
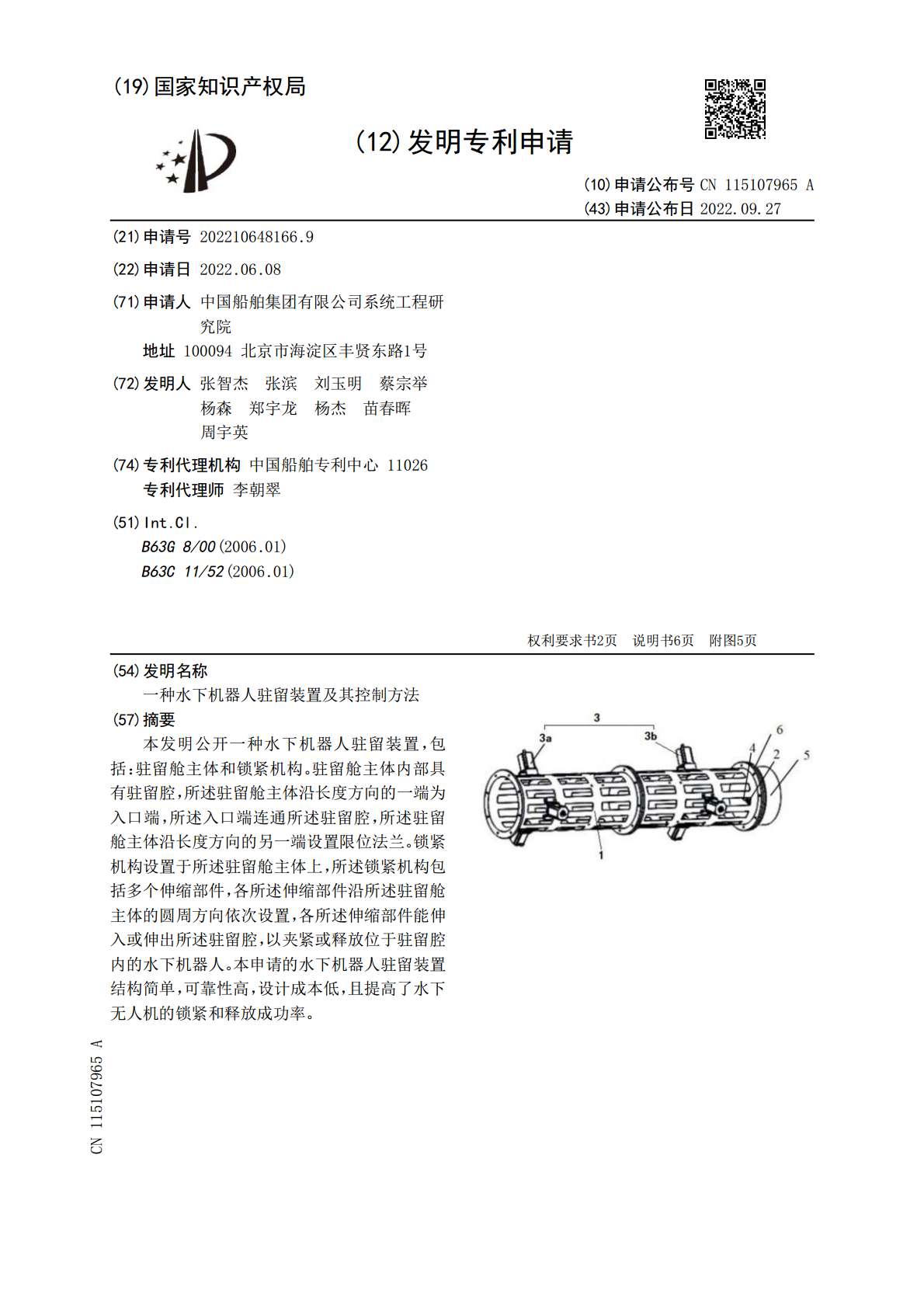
本发明公开一种水下机器人驻留装置,包括:驻留舱主体和锁紧机构。驻留舱主体内部具有驻留腔,所述驻留舱主体沿长度方向的一端为入口端,所述入口端连通所述驻留腔,所述驻留舱主体沿长度方向的另一端设置限位法兰。锁紧机构设置于所述驻留舱主体上,所述锁紧机构包括多个伸缩部件,各所述伸缩部件沿所述驻留舱主体的圆周方向依次设置,各所述伸缩部件能伸入或伸出所述驻留腔,以夹紧或释放位于驻留腔内的水下机器人。本申请的水下机器人驻留装置结构简单,可靠性高,设计成本低,且提高了水下无人机的锁紧和释放成功率。

一种水下检测装置及其控制方法.pdf
本发明公开了一种水下检测装置及其控制方法,装置包括水面艇和水下无人机,水面艇包括:艇体;设置在艇体底部的横向稳姿推进器和轨道矢量推进器;设置在艇体上的控制箱,横向稳姿推进器和轨道矢量推进器均与控制箱电连接;设置在艇体上的电缆和电缆收卷组件,控制箱通过电缆与水下无人机连接,电缆收卷组件与控制箱电连接;设置在艇体上的定位组件,定位组件与控制箱电连接。本发明通过水面艇和水下无人机的协同运行实现对水下结构的检测,一方面提高了水下无人机的活动灵活度,减少了信号传输距离,提高了水下检测的效率;另一方面可对水下无人机进

一种水下机器人控制装置及方法.pdf
本发明公开了一种水下机器人控制装置,包括控制器、水下机器人,所述水下机器人上固定设置有陀螺仪、过滤器、行走机构,所述陀螺仪的输出端、所述过滤器的输入端分别与所述控制器的输入端相联接,所述控制器的输出端与所述水下机器人的输入端相联接,所述陀螺仪、所述行走机构与所述过滤器分别用来获取所述水下机器人的行走角度、行走位移以及过滤控制。本发明解决了水下机器人作业技术领域的环境监测和水下升降的功能的实现,提高了水下作业的工作效率和环境适应范围,减少了水下救援作业的作业难度;行走机构采用麦克纳姆轮,便于横向、斜向以及转
一种水下机器人柔性抓取装置及其方法.pdf
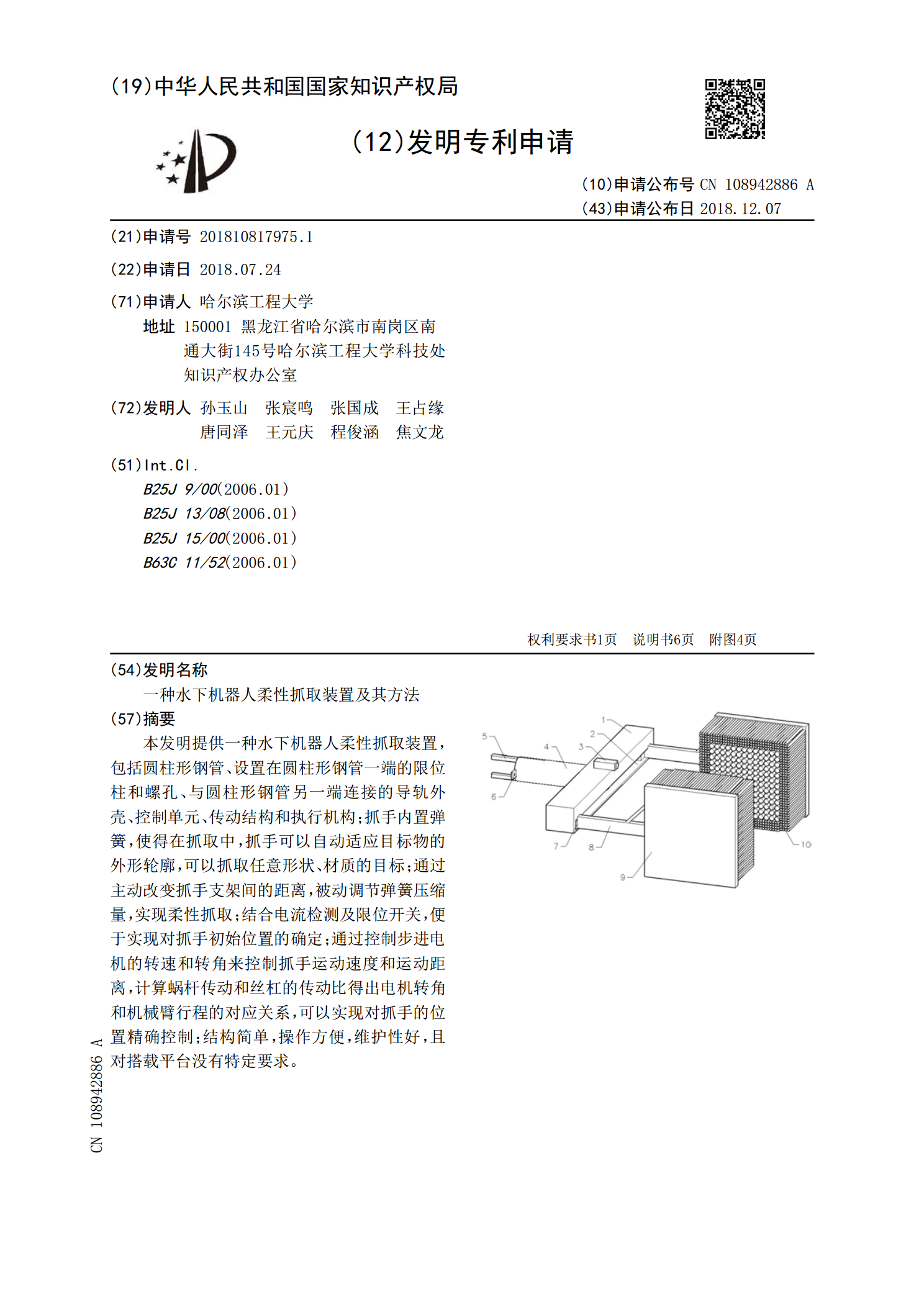
本发明提供一种水下机器人柔性抓取装置,包括圆柱形钢管、设置在圆柱形钢管一端的限位柱和螺孔、与圆柱形钢管另一端连接的导轨外壳、控制单元、传动结构和执行机构;抓手内置弹簧,使得在抓取中,抓手可以自动适应目标物的外形轮廓,可以抓取任意形状、材质的目标;通过主动改变抓手支架间的距离,被动调节弹簧压缩量,实现柔性抓取;结合电流检测及限位开关,便于实现对抓手初始位置的确定;通过控制步进电机的转速和转角来控制抓手运动速度和运动距离,计算蜗杆传动和丝杠的传动比得出电机转角和机械臂行程的对应关系,可以实现对抓手的位置精确控
一种水下爬壁机器人定位方法及其定位装置.pdf
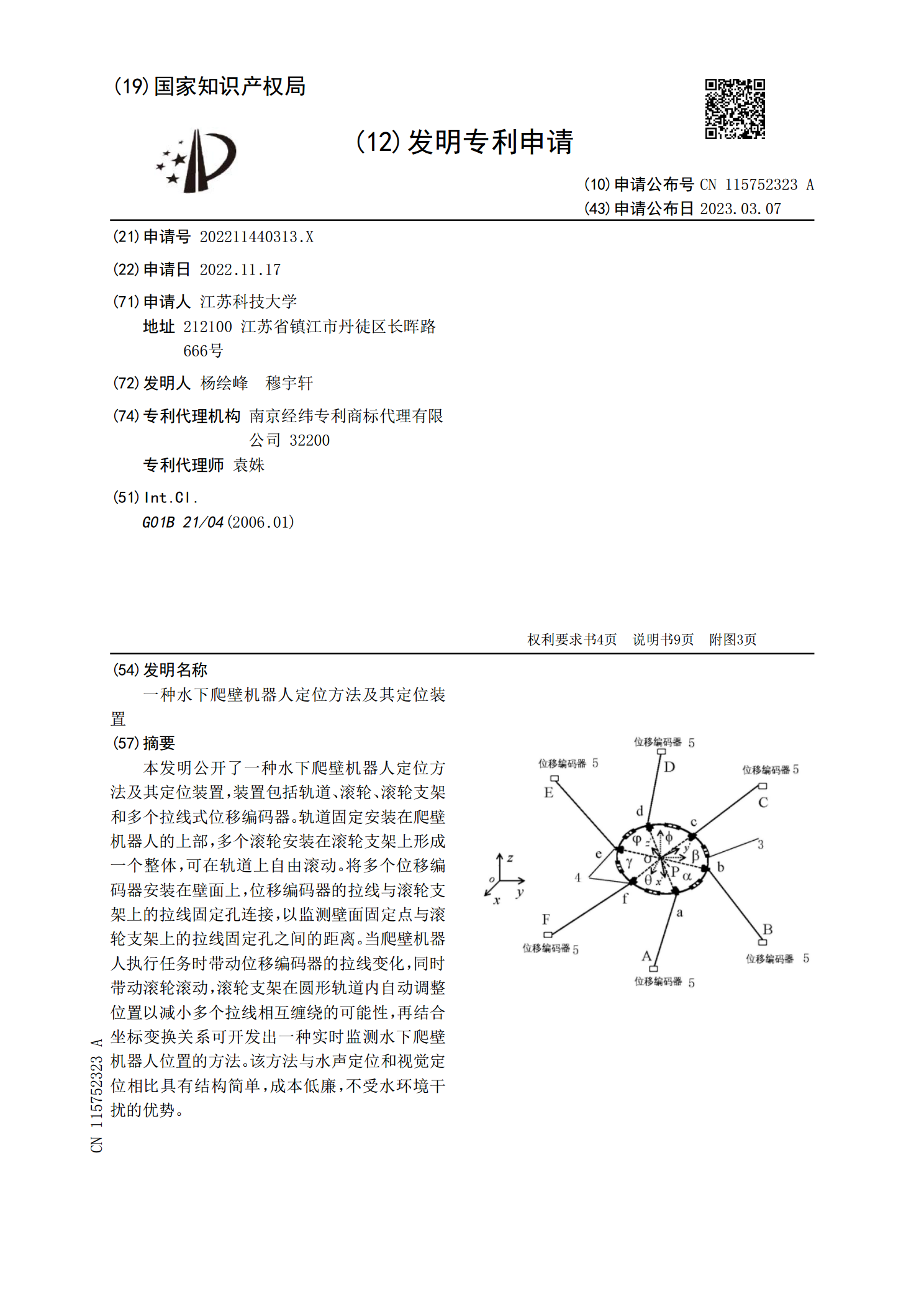
本发明公开了一种水下爬壁机器人定位方法及其定位装置,装置包括轨道、滚轮、滚轮支架和多个拉线式位移编码器。轨道固定安装在爬壁机器人的上部,多个滚轮安装在滚轮支架上形成一个整体,可在轨道上自由滚动。将多个位移编码器安装在壁面上,位移编码器的拉线与滚轮支架上的拉线固定孔连接,以监测壁面固定点与滚轮支架上的拉线固定孔之间的距离。当爬壁机器人执行任务时带动位移编码器的拉线变化,同时带动滚轮滚动,滚轮支架在圆形轨道内自动调整位置以减小多个拉线相互缠绕的可能性,再结合坐标变换关系可开发出一种实时监测水下爬壁机器人位置的