
一种水下钢管焊接机器人.pdf

文库****坚白


1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下钢管焊接机器人.pdf
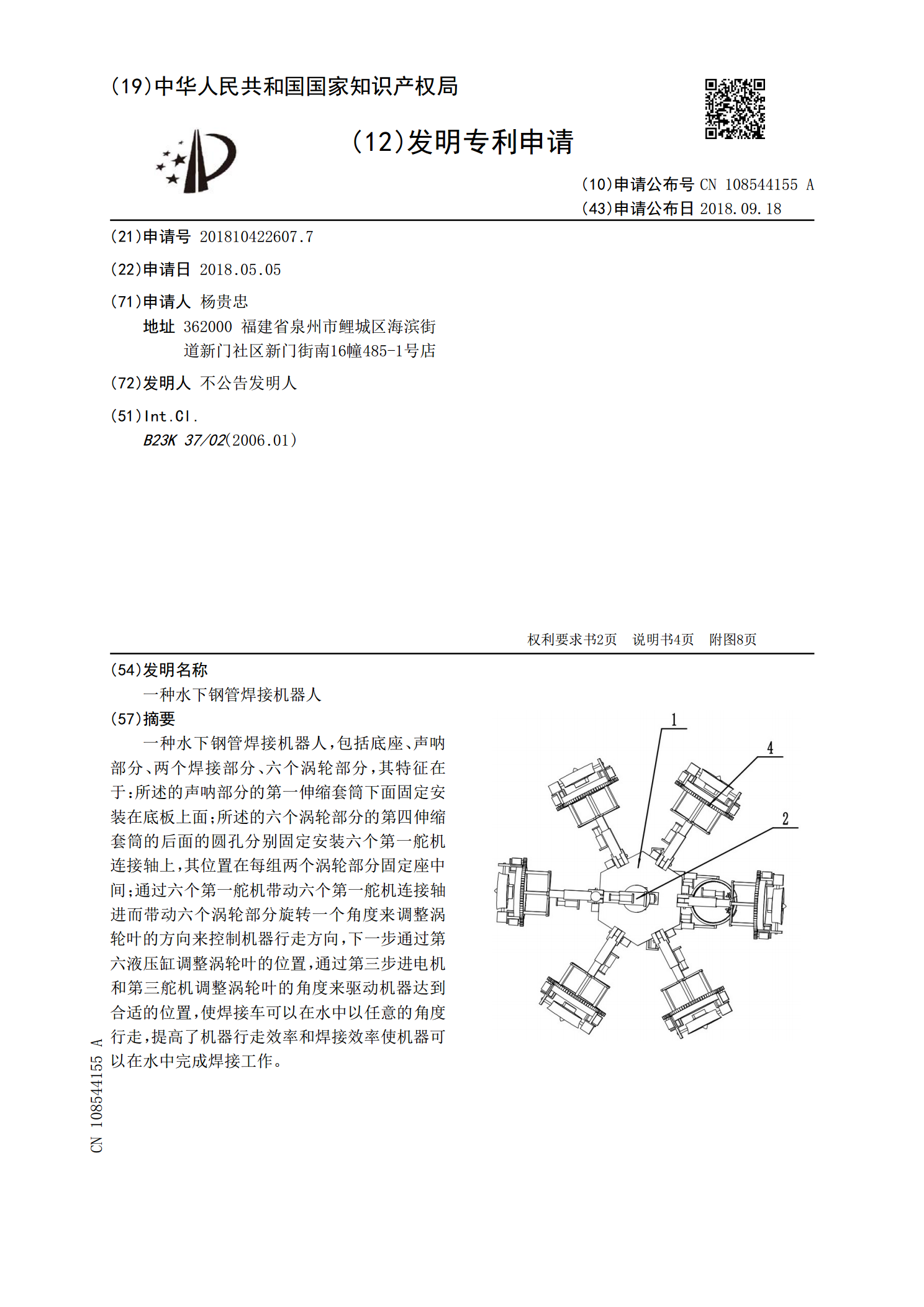
一种水下钢管焊接机器人,包括底座、声呐部分、两个焊接部分、六个涡轮部分,其特征在于:所述的声呐部分的第一伸缩套筒下面固定安装在底板上面;所述的六个涡轮部分的第四伸缩套筒的后面的圆孔分别固定安装六个第一舵机连接轴上,其位置在每组两个涡轮部分固定座中间;通过六个第一舵机带动六个第一舵机连接轴进而带动六个涡轮部分旋转一个角度来调整涡轮叶的方向来控制机器行走方向,下一步通过第六液压缸调整涡轮叶的位置,通过第三步进电机和第三舵机调整涡轮叶的角度来驱动机器达到合适的位置,使焊接车可以在水中以任意的角度行走,提高了机器
一种钢管焊接机器人.pdf
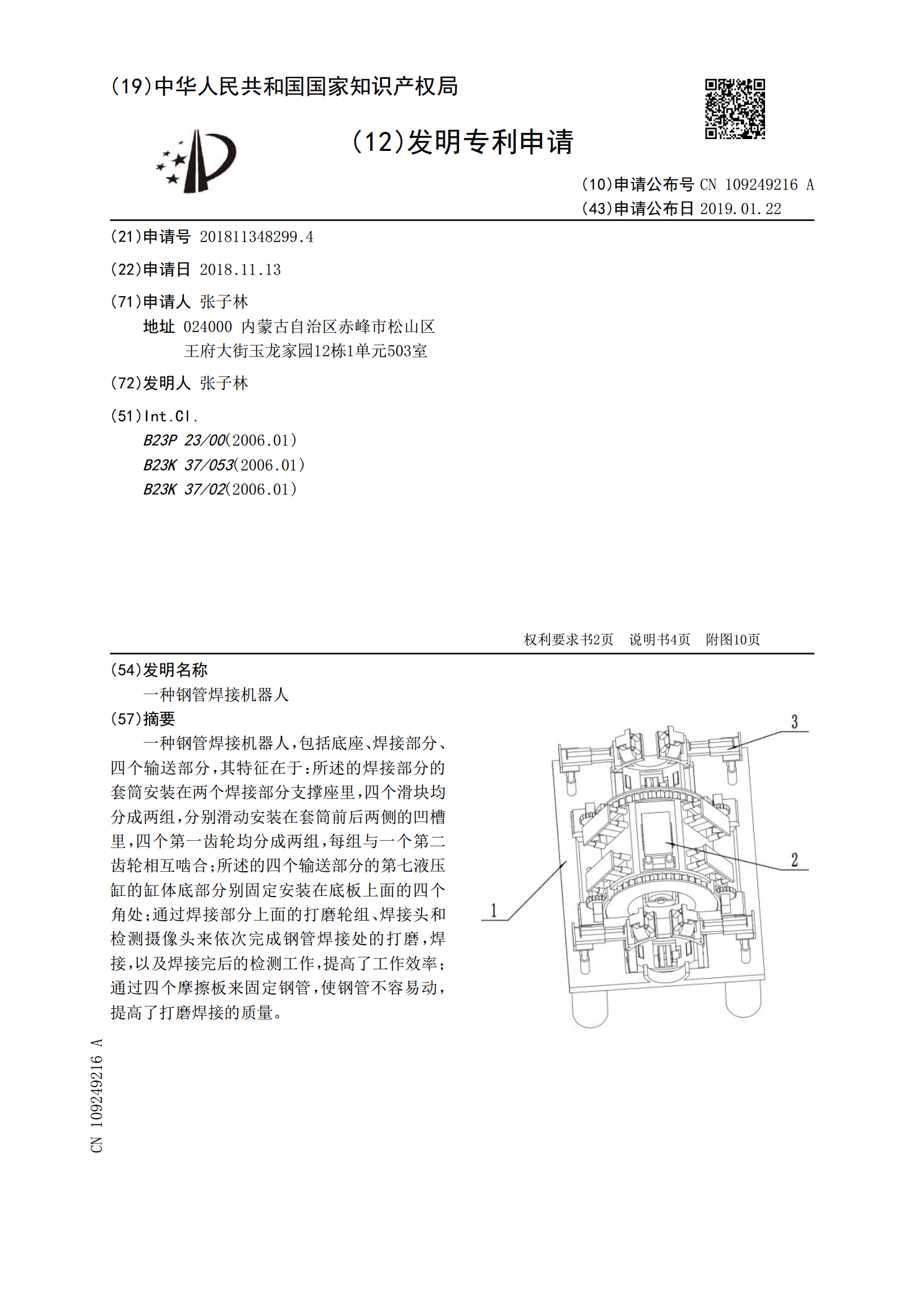
一种钢管焊接机器人,包括底座、焊接部分、四个输送部分,其特征在于:所述的焊接部分的套筒安装在两个焊接部分支撑座里,四个滑块均分成两组,分别滑动安装在套筒前后两侧的凹槽里,四个第一齿轮均分成两组,每组与一个第二齿轮相互啮合;所述的四个输送部分的第七液压缸的缸体底部分别固定安装在底板上面的四个角处;通过焊接部分上面的打磨轮组、焊接头和检测摄像头来依次完成钢管焊接处的打磨,焊接,以及焊接完后的检测工作,提高了工作效率;通过四个摩擦板来固定钢管,使钢管不容易动,提高了打磨焊接的质量。

一种水下焊接机器人控制装置.pdf
本发明提供一种水下焊接机器人控制装置,包括导轨、控制台和驱动电机,所述导轨呈弧形设置,所述控制台设在导轨上,所述控制台下方设置有槽轮,所述控制台通过槽轮与导轨滑动连接,所述驱动电机设在控制台一侧,所述驱动电机与控制台电性连接,所述控制台上设置有横向执行机构、纵向执行机构和摆动机构,所述驱动电机、横向执行机构、纵向执行机构和摆动机构依次传动连接,所述摆动机构下方设置有焊接机械手,该水下焊接机器人控制装置结构简单,操控方便,非常适合水下管道的焊接,焊接精度高。

一种智能钢管焊接机器人.pdf
一种智能钢管焊接机器人,包括底座部分、方形管夹取部分、第一焊接部分、第二焊接部分、钢管夹盘部分,其特征在于:所述的方形管夹取部分的两个滑块分别滑动安装在支撑板内侧的两个燕尾槽里,第二齿轮与支撑板内侧的齿条相互啮合;所述的第一焊接部分的伸缩机构下面固定安装在底板上面靠后的位置;所述的第二焊接部分的两个第十液压缸的缸体底部固定安装在底板下面靠右的位置;所述的钢管夹盘部分的钢管夹盘转动安装在底板中间的圆孔里,第五齿轮与第一齿轮相互啮合;通过第二步进电机带动切割轮可以将钢管切成合适的长度使钢管连接更合适;通过第一

一种密闭式水下焊接机器人.pdf
一种密闭式水下焊接机器人,包括第一外壳部分、两个固定部分、十二个涡轮部分、两个打磨部分、两个焊接部分、第二外壳部分,其特征在于:所述的两个焊接部分的两个第二圆弧滑块分别滑动安装在两个固定部分下面的圆弧燕尾槽里,所述的两个第三齿轮分别与两个固定部分下面的圆弧齿条相互啮合;通过第一外壳部分和第二外壳部分将焊接处夹住,通过六个第二液压缸收缩带动六个卡板将两个外壳部分锁紧,通过第一步进电机带动第一水泵和第七步进电机带动第二水泵将外壳部分里面的水抽干,使机器完成将焊接处的水抽干,给焊接提供了一个好的环境,提高了焊接