
一种基于空间分割的障碍物检测方法.pdf

是你****嘉嘉


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于空间分割的障碍物检测方法.pdf
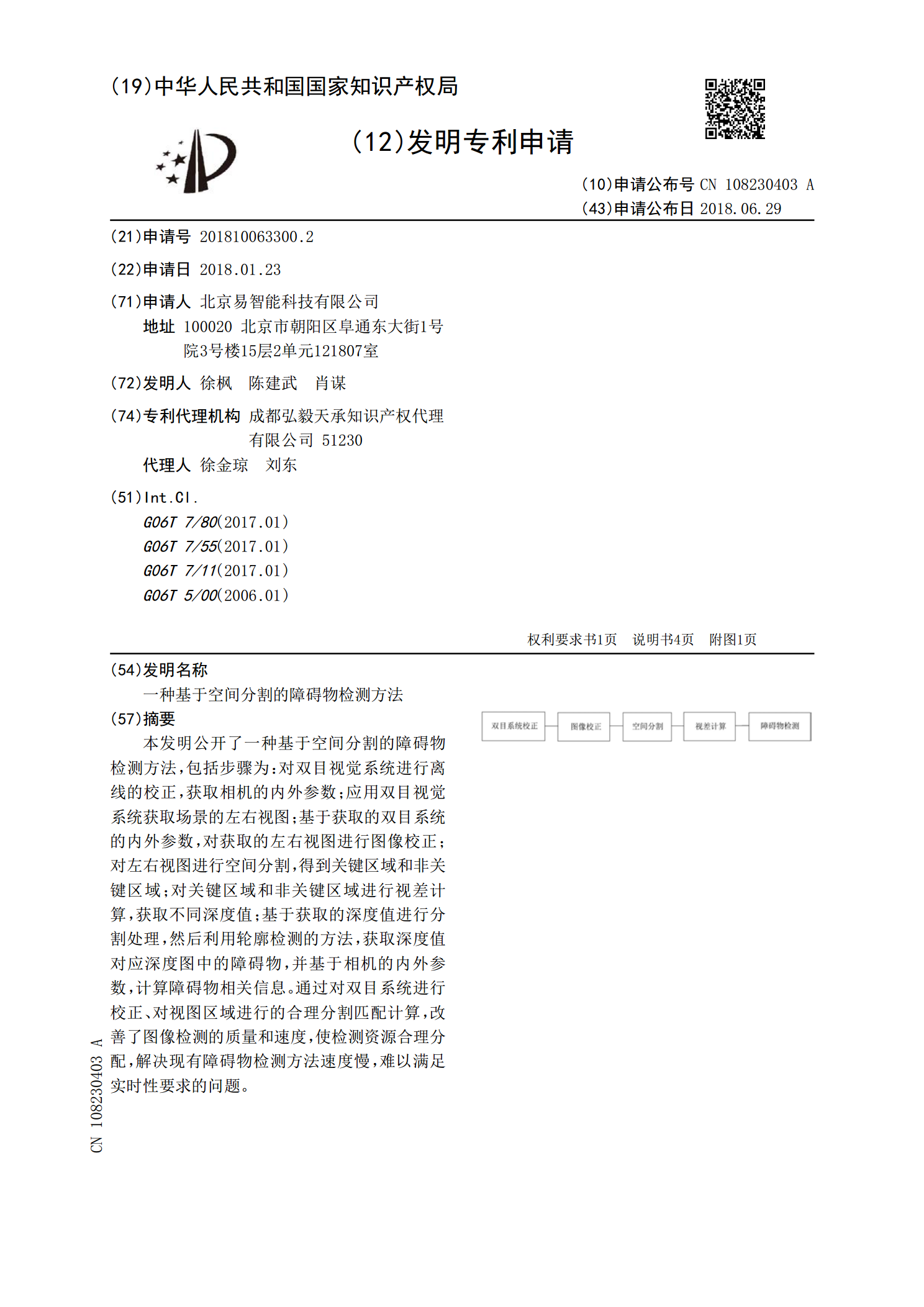
本发明公开了一种基于空间分割的障碍物检测方法,包括步骤为:对双目视觉系统进行离线的校正,获取相机的内外参数;应用双目视觉系统获取场景的左右视图;基于获取的双目系统的内外参数,对获取的左右视图进行图像校正;对左右视图进行空间分割,得到关键区域和非关键区域;对关键区域和非关键区域进行视差计算,获取不同深度值;基于获取的深度值进行分割处理,然后利用轮廓检测的方法,获取深度值对应深度图中的障碍物,并基于相机的内外参数,计算障碍物相关信息。通过对双目系统进行校正、对视图区域进行的合理分割匹配计算,改善了图像检测的质
基于目标检测和语义分割融合的障碍物检测方法.pdf
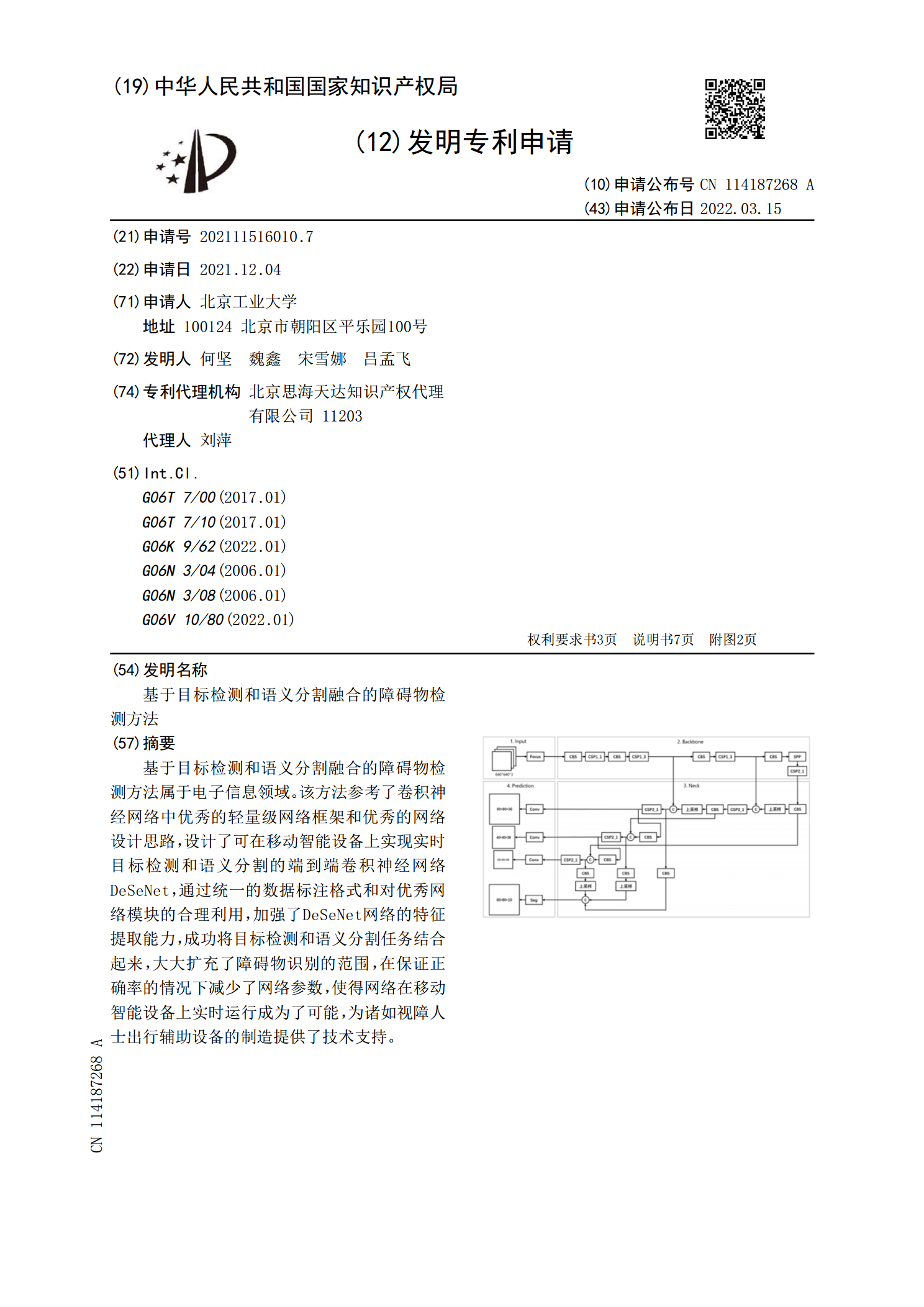
基于目标检测和语义分割融合的障碍物检测方法属于电子信息领域。该方法参考了卷积神经网络中优秀的轻量级网络框架和优秀的网络设计思路,设计了可在移动智能设备上实现实时目标检测和语义分割的端到端卷积神经网络DeSeNet,通过统一的数据标注格式和对优秀网络模块的合理利用,加强了DeSeNet网络的特征提取能力,成功将目标检测和语义分割任务结合起来,大大扩充了障碍物识别的范围,在保证正确率的情况下减少了网络参数,使得网络在移动智能设备上实时运行成为了可能,为诸如视障人士出行辅助设备的制造提供了技术支持。

无人驾驶车辆基于语义分割方法障碍物检测.docx
无人驾驶车辆基于语义分割方法障碍物检测标题:基于语义分割方法的无人驾驶车辆障碍物检测摘要:随着无人驾驶技术的迅速发展,无人驾驶车辆的安全性和可靠性成为关注的焦点。其中,准确有效的障碍物检测是确保车辆行驶安全的重要环节。本论文基于语义分割方法,探讨了在无人驾驶车辆中实现准确、高效的障碍物检测的关键技术和方法。1.引言障碍物检测是无人驾驶车辆中最关键的任务之一,它能够准确识别道路上的人、车、建筑物等障碍物,并通过路径规划、避障等方式确保车辆的安全行驶。传统的障碍物检测方法主要依赖于图像处理和计算机视觉技术,但

一种场景分割和障碍物检测的方法.pdf
本发明涉及图像处理领域,公开了一种场景分割和障碍物检测的方法,其特征在于,该方法包括:提取场景图像的特征f;对所述特征f进行分类,获取对所述场景图像中的各个场景特征进行分类后的特征f
一种基于图像分割的障碍物提取方法、系统和智能终端.pdf
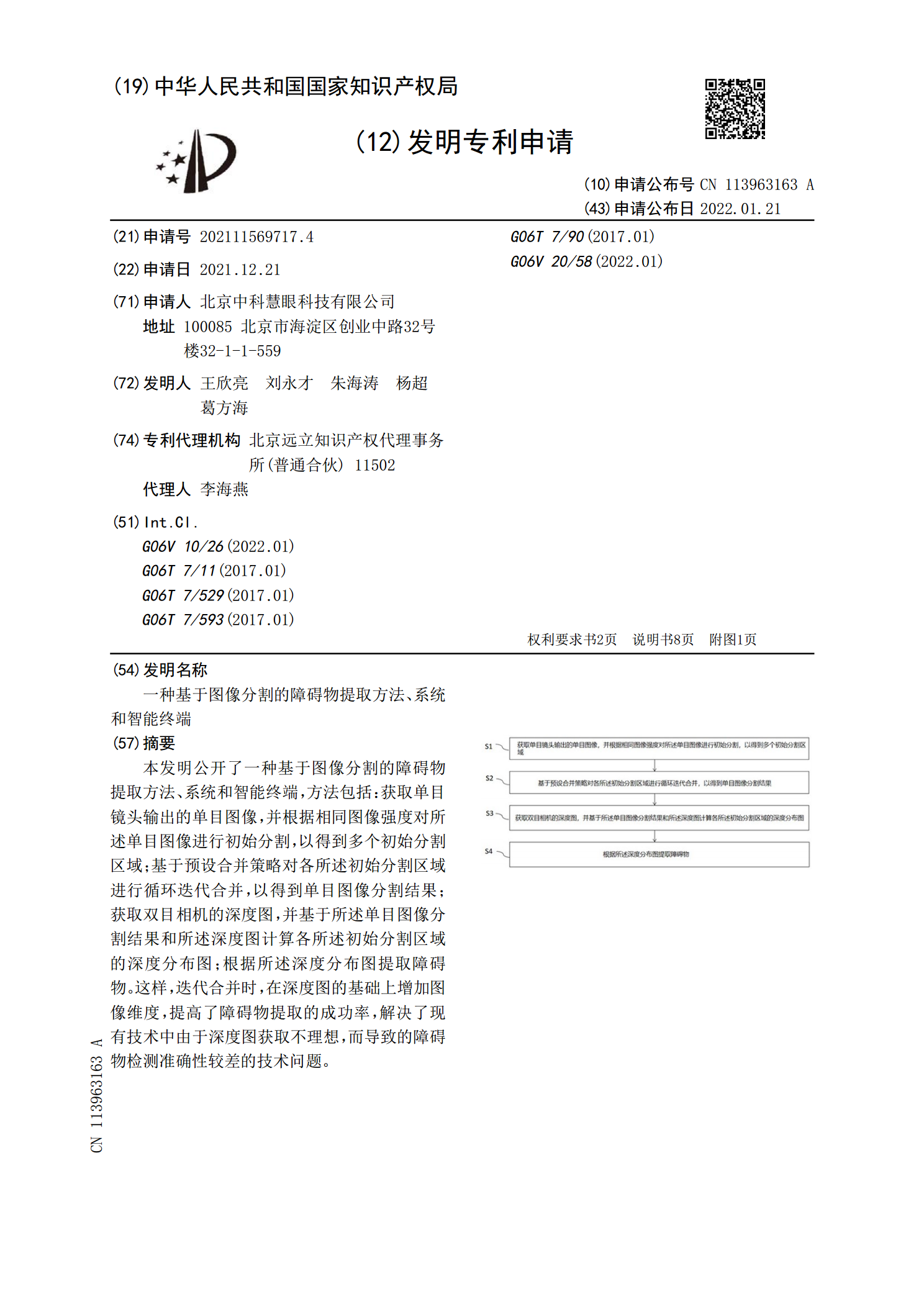
本发明公开了一种基于图像分割的障碍物提取方法、系统和智能终端,方法包括:获取单目镜头输出的单目图像,并根据相同图像强度对所述单目图像进行初始分割,以得到多个初始分割区域;基于预设合并策略对各所述初始分割区域进行循环迭代合并,以得到单目图像分割结果;获取双目相机的深度图,并基于所述单目图像分割结果和所述深度图计算各所述初始分割区域的深度分布图;根据所述深度分布图提取障碍物。这样,迭代合并时,在深度图的基础上增加图像维度,提高了障碍物提取的成功率,解决了现有技术中由于深度图获取不理想,而导致的障碍物检测准确性