
无人驾驶车辆基于语义分割方法障碍物检测.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人驾驶车辆基于语义分割方法障碍物检测.docx
无人驾驶车辆基于语义分割方法障碍物检测标题:基于语义分割方法的无人驾驶车辆障碍物检测摘要:随着无人驾驶技术的迅速发展,无人驾驶车辆的安全性和可靠性成为关注的焦点。其中,准确有效的障碍物检测是确保车辆行驶安全的重要环节。本论文基于语义分割方法,探讨了在无人驾驶车辆中实现准确、高效的障碍物检测的关键技术和方法。1.引言障碍物检测是无人驾驶车辆中最关键的任务之一,它能够准确识别道路上的人、车、建筑物等障碍物,并通过路径规划、避障等方式确保车辆的安全行驶。传统的障碍物检测方法主要依赖于图像处理和计算机视觉技术,但
基于目标检测和语义分割融合的障碍物检测方法.pdf
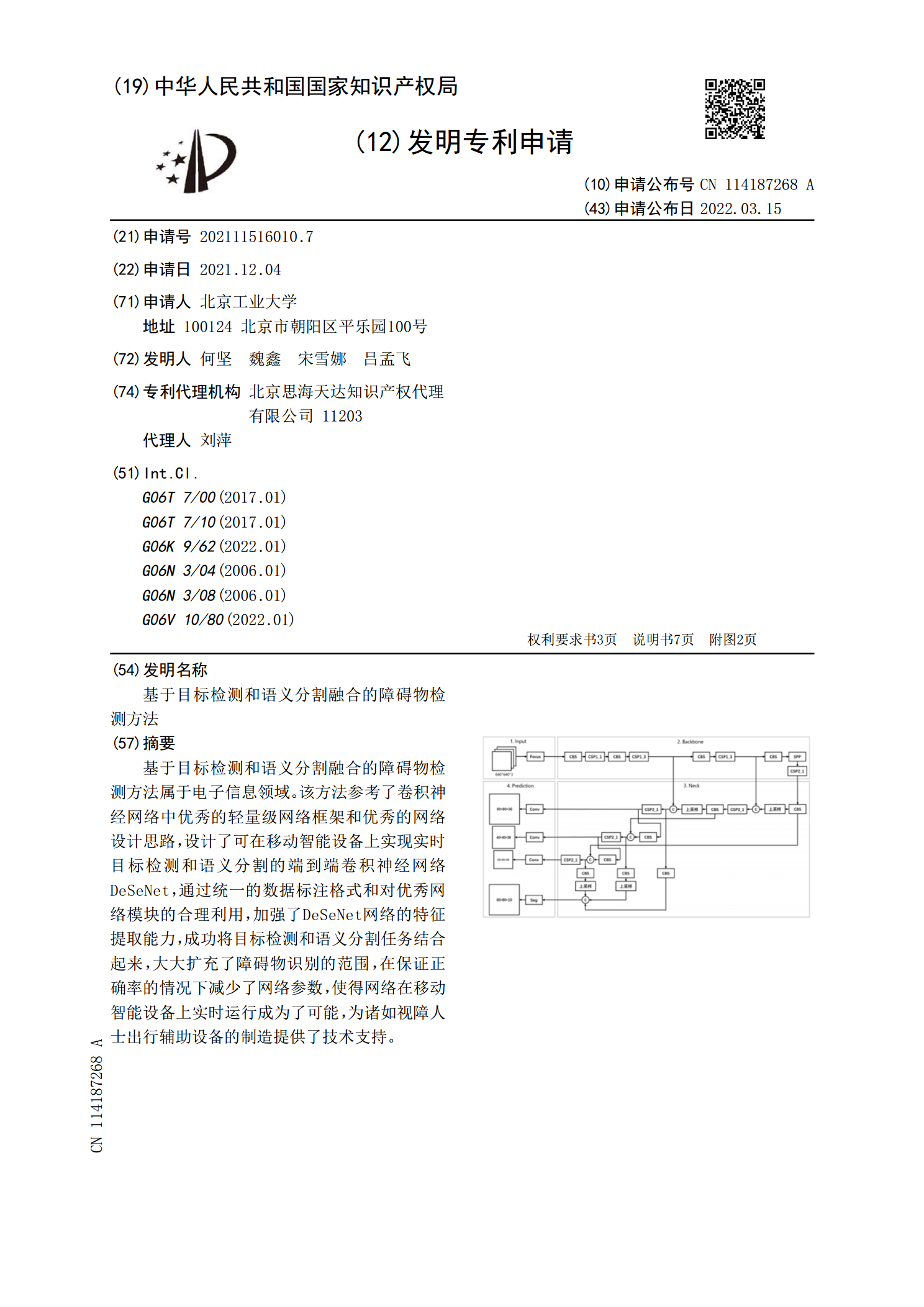
基于目标检测和语义分割融合的障碍物检测方法属于电子信息领域。该方法参考了卷积神经网络中优秀的轻量级网络框架和优秀的网络设计思路,设计了可在移动智能设备上实现实时目标检测和语义分割的端到端卷积神经网络DeSeNet,通过统一的数据标注格式和对优秀网络模块的合理利用,加强了DeSeNet网络的特征提取能力,成功将目标检测和语义分割任务结合起来,大大扩充了障碍物识别的范围,在保证正确率的情况下减少了网络参数,使得网络在移动智能设备上实时运行成为了可能,为诸如视障人士出行辅助设备的制造提供了技术支持。

基于语义分割的车辆行驶车道定位方法.docx
基于语义分割的车辆行驶车道定位方法基于语义分割的车辆行驶车道定位方法摘要:车辆行驶车道定位是自动驾驶系统中的一个关键任务,它可为车辆提供准确的位置估计信息,从而实现自动驾驶的目标。本文提出了一种基于语义分割的车辆行驶车道定位方法。首先,通过使用深度学习模型,对输入图像进行语义分割,得到各个像素点的语义标签。然后,根据语义标签和车道几何形状的先验知识,将车辆行驶车道从语义分割结果中提取出来。最后,利用车道上的特征点进行车道线拟合,实现车辆行驶车道的定位。实验结果表明,本方法具有较高的定位准确性和鲁棒性。1.

基于无人驾驶的障碍物检测方法研究.pptx
基于无人驾驶的障碍物检测方法研究目录无人驾驶技术概述无人驾驶技术的定义无人驾驶技术的应用场景障碍物检测在无人驾驶中的重要性基于无人驾驶的障碍物检测方法传统障碍物检测方法基于深度学习的障碍物检测方法激光雷达在障碍物检测中的应用毫米波雷达在障碍物检测中的应用无人驾驶障碍物检测技术的挑战与展望当前障碍物检测技术的挑战未来障碍物检测技术的发展趋势无人驾驶技术的商业化前景基于无人驾驶的障碍物检测技术实践案例国内外知名无人驾驶企业的障碍物检测技术实践学术界在障碍物检测技术的研究成果障碍物检测技术的实际应用效果评估无人
无人驾驶中的场景实时语义分割方法.pptx
汇报人:CONTENTS添加章节标题场景实时语义分割方法的概述场景实时语义分割的定义场景实时语义分割的原理场景实时语义分割的应用无人驾驶中场景实时语义分割的重要性提高无人驾驶的安全性提升无人驾驶的效率增强无人驾驶的自主性场景实时语义分割的关键技术数据预处理技术特征提取技术分类与分割算法深度学习在场景实时语义分割中的应用场景实时语义分割的挑战与解决方案数据量不足的问题及解决方案实时性要求的问题及解决方案算法精度的问题及解决方案场景实时语义分割的未来发展算法优化与改进硬件加速技术的研究与应用与其他感知技术的融