
一种场景分割和障碍物检测的方法.pdf

雨巷****彦峰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种场景分割和障碍物检测的方法.pdf
本发明涉及图像处理领域,公开了一种场景分割和障碍物检测的方法,其特征在于,该方法包括:提取场景图像的特征f;对所述特征f进行分类,获取对所述场景图像中的各个场景特征进行分类后的特征f
一种场景分割和障碍物检测的系统.pdf
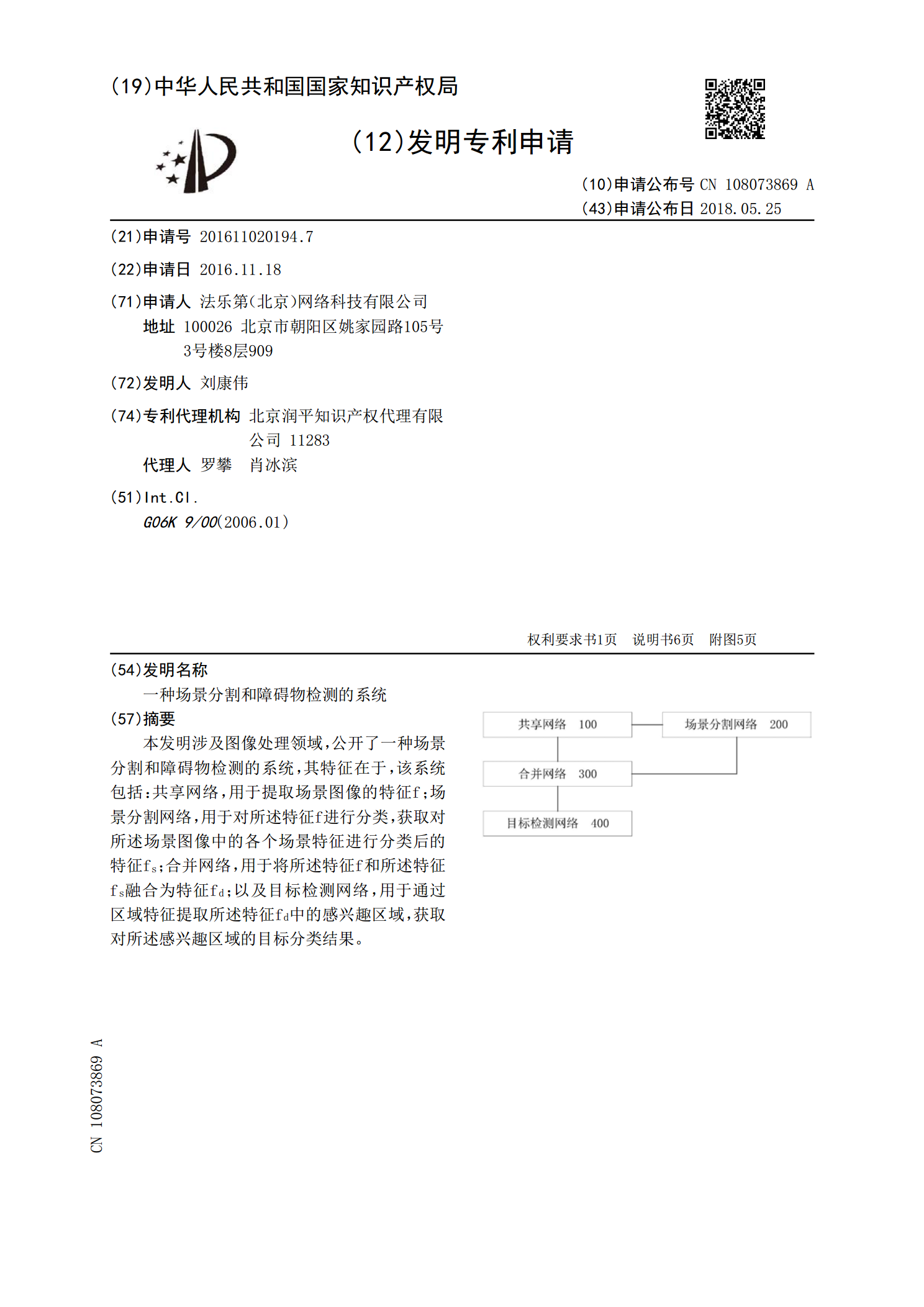
本发明涉及图像处理领域,公开了一种场景分割和障碍物检测的系统,其特征在于,该系统包括:共享网络,用于提取场景图像的特征f;场景分割网络,用于对所述特征f进行分类,获取对所述场景图像中的各个场景特征进行分类后的特征f
一种基于空间分割的障碍物检测方法.pdf
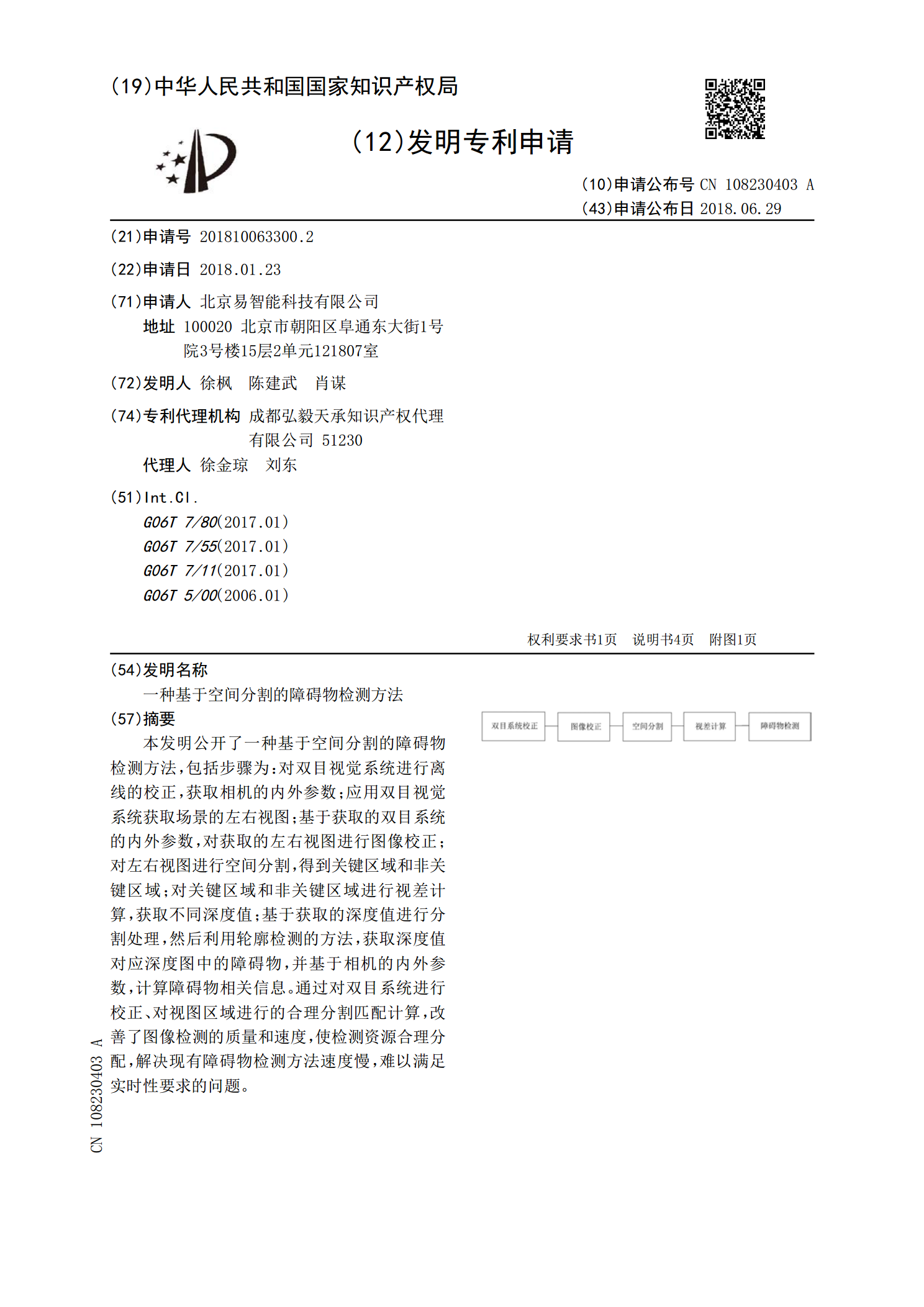
本发明公开了一种基于空间分割的障碍物检测方法,包括步骤为:对双目视觉系统进行离线的校正,获取相机的内外参数;应用双目视觉系统获取场景的左右视图;基于获取的双目系统的内外参数,对获取的左右视图进行图像校正;对左右视图进行空间分割,得到关键区域和非关键区域;对关键区域和非关键区域进行视差计算,获取不同深度值;基于获取的深度值进行分割处理,然后利用轮廓检测的方法,获取深度值对应深度图中的障碍物,并基于相机的内外参数,计算障碍物相关信息。通过对双目系统进行校正、对视图区域进行的合理分割匹配计算,改善了图像检测的质
基于目标检测和语义分割融合的障碍物检测方法.pdf
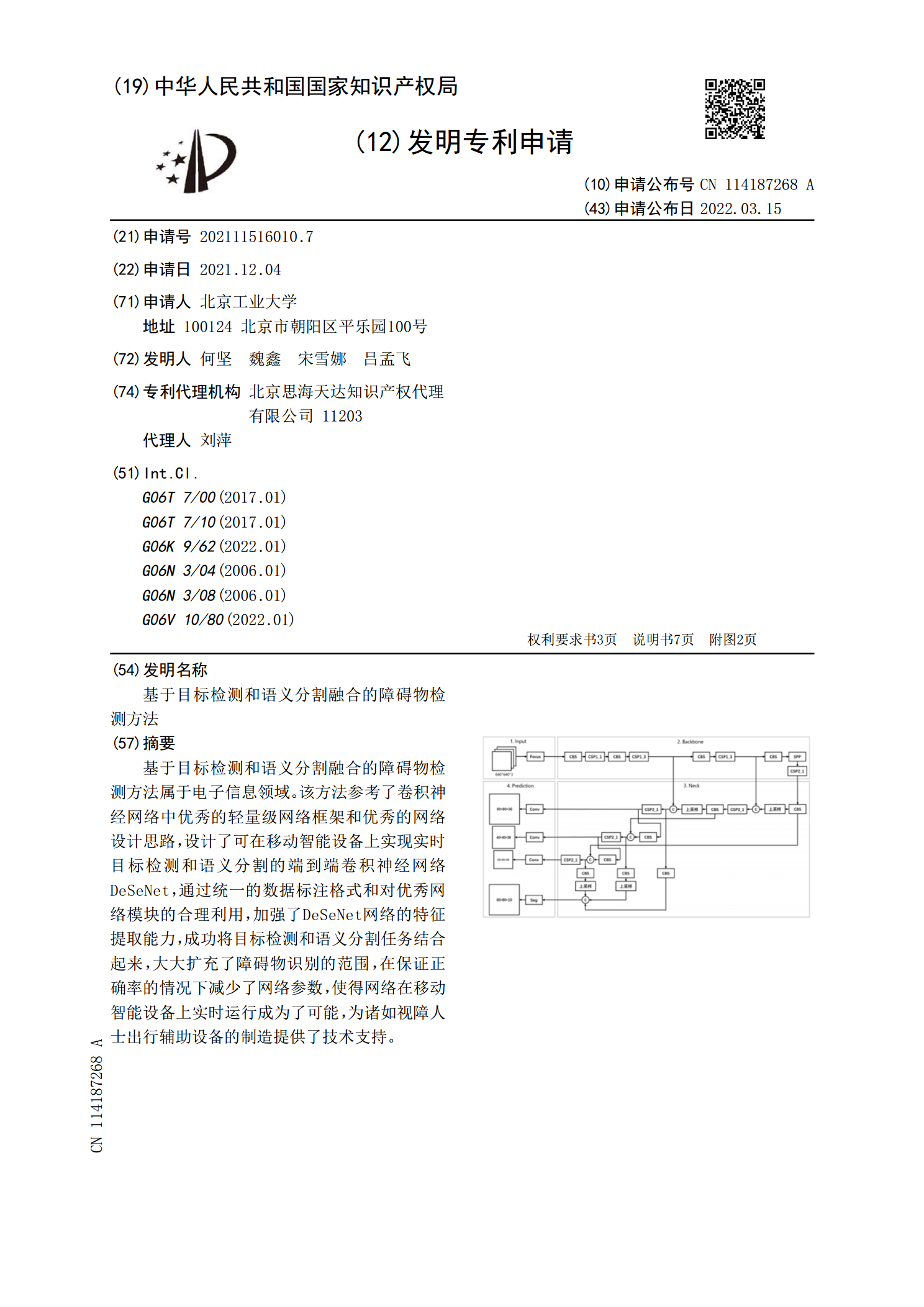
基于目标检测和语义分割融合的障碍物检测方法属于电子信息领域。该方法参考了卷积神经网络中优秀的轻量级网络框架和优秀的网络设计思路,设计了可在移动智能设备上实现实时目标检测和语义分割的端到端卷积神经网络DeSeNet,通过统一的数据标注格式和对优秀网络模块的合理利用,加强了DeSeNet网络的特征提取能力,成功将目标检测和语义分割任务结合起来,大大扩充了障碍物识别的范围,在保证正确率的情况下减少了网络参数,使得网络在移动智能设备上实时运行成为了可能,为诸如视障人士出行辅助设备的制造提供了技术支持。
一种场景分割方法及装置.pdf
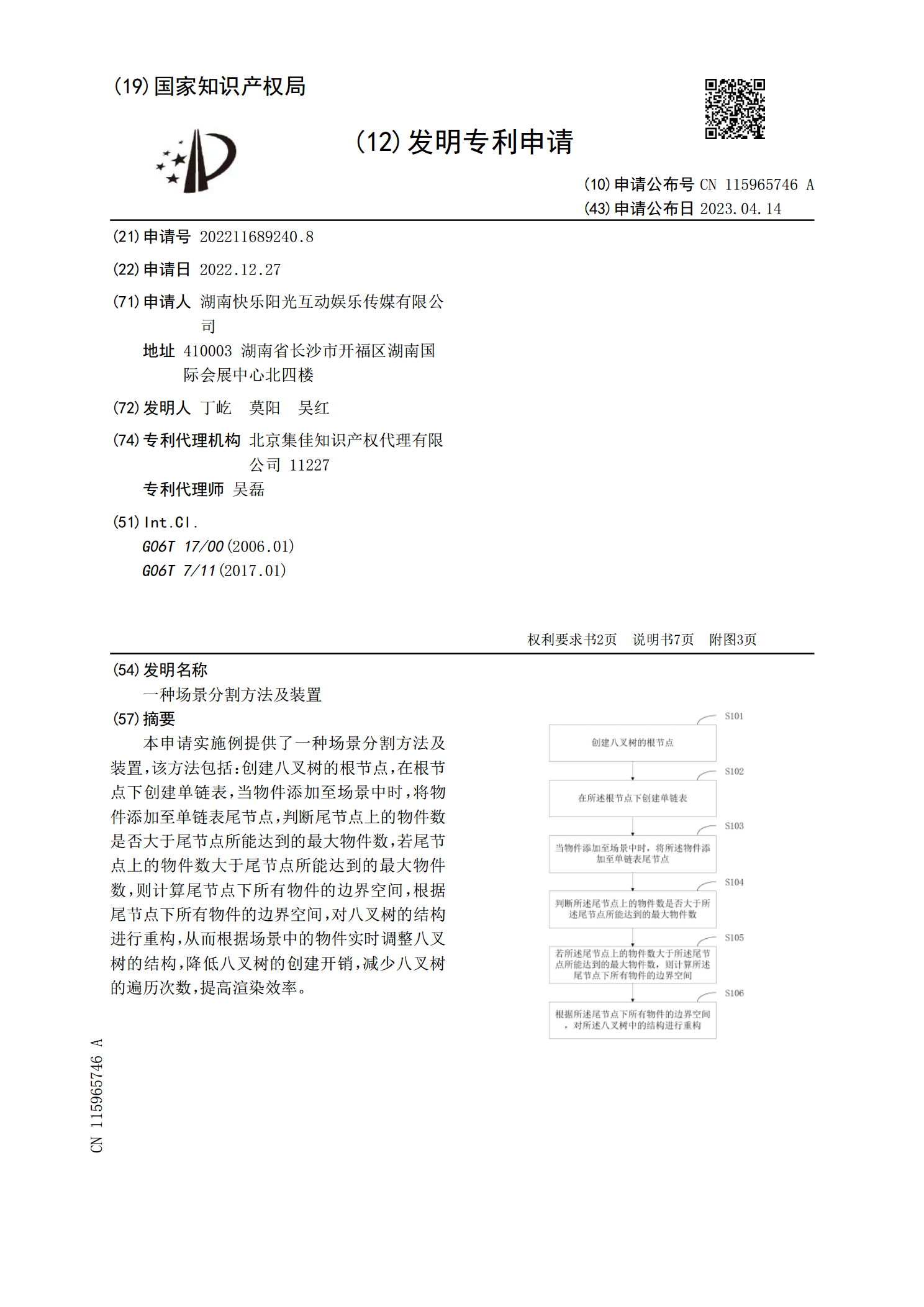
本申请实施例提供了一种场景分割方法及装置,该方法包括:创建八叉树的根节点,在根节点下创建单链表,当物件添加至场景中时,将物件添加至单链表尾节点,判断尾节点上的物件数是否大于尾节点所能达到的最大物件数,若尾节点上的物件数大于尾节点所能达到的最大物件数,则计算尾节点下所有物件的边界空间,根据尾节点下所有物件的边界空间,对八叉树的结构进行重构,从而根据场景中的物件实时调整八叉树的结构,降低八叉树的创建开销,减少八叉树的遍历次数,提高渲染效率。