
基于目标检测和语义分割融合的障碍物检测方法.pdf

靖烟****魔王

1/10
2/10
3/10
4/10
5/10

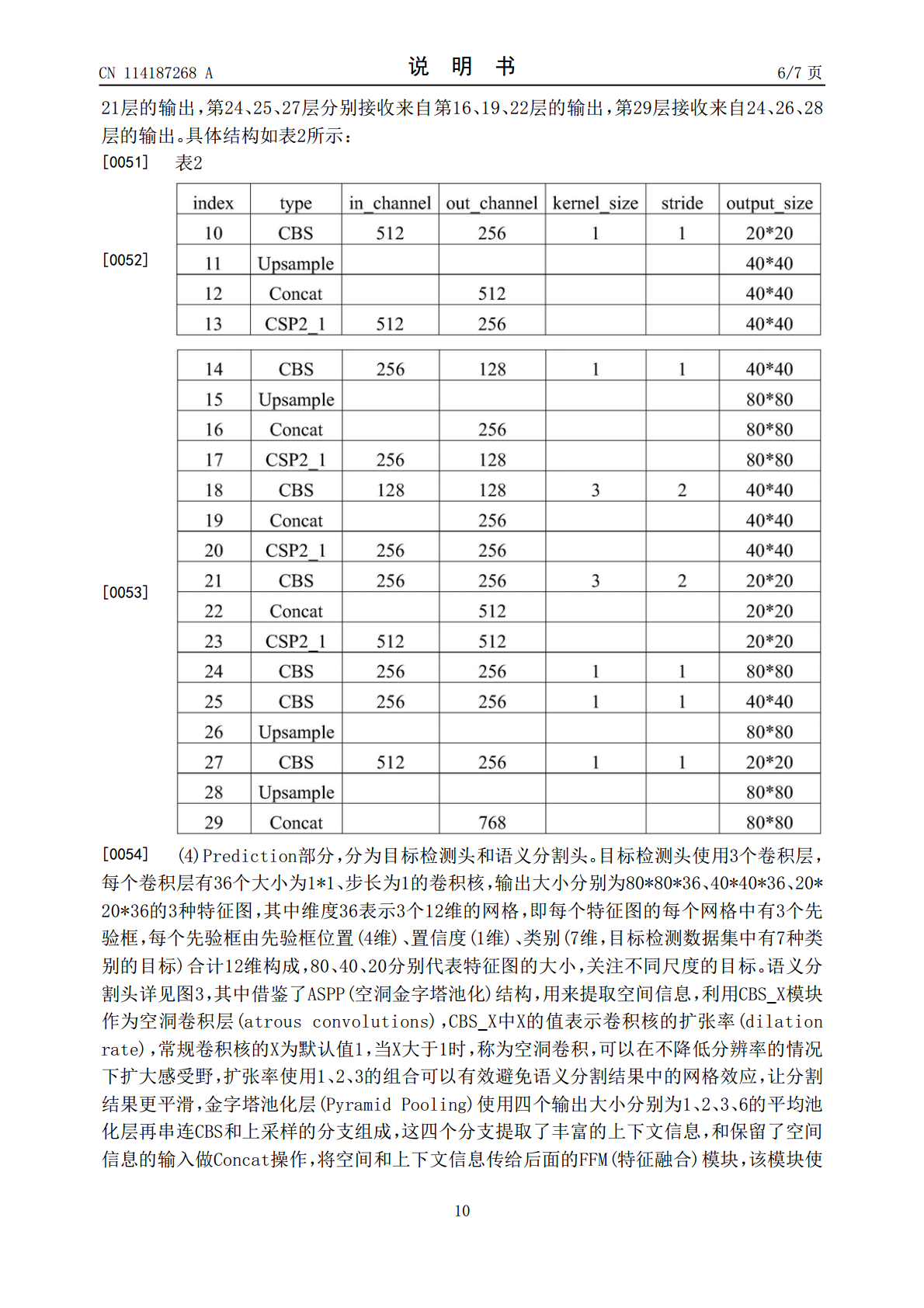
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于目标检测和语义分割融合的障碍物检测方法.pdf
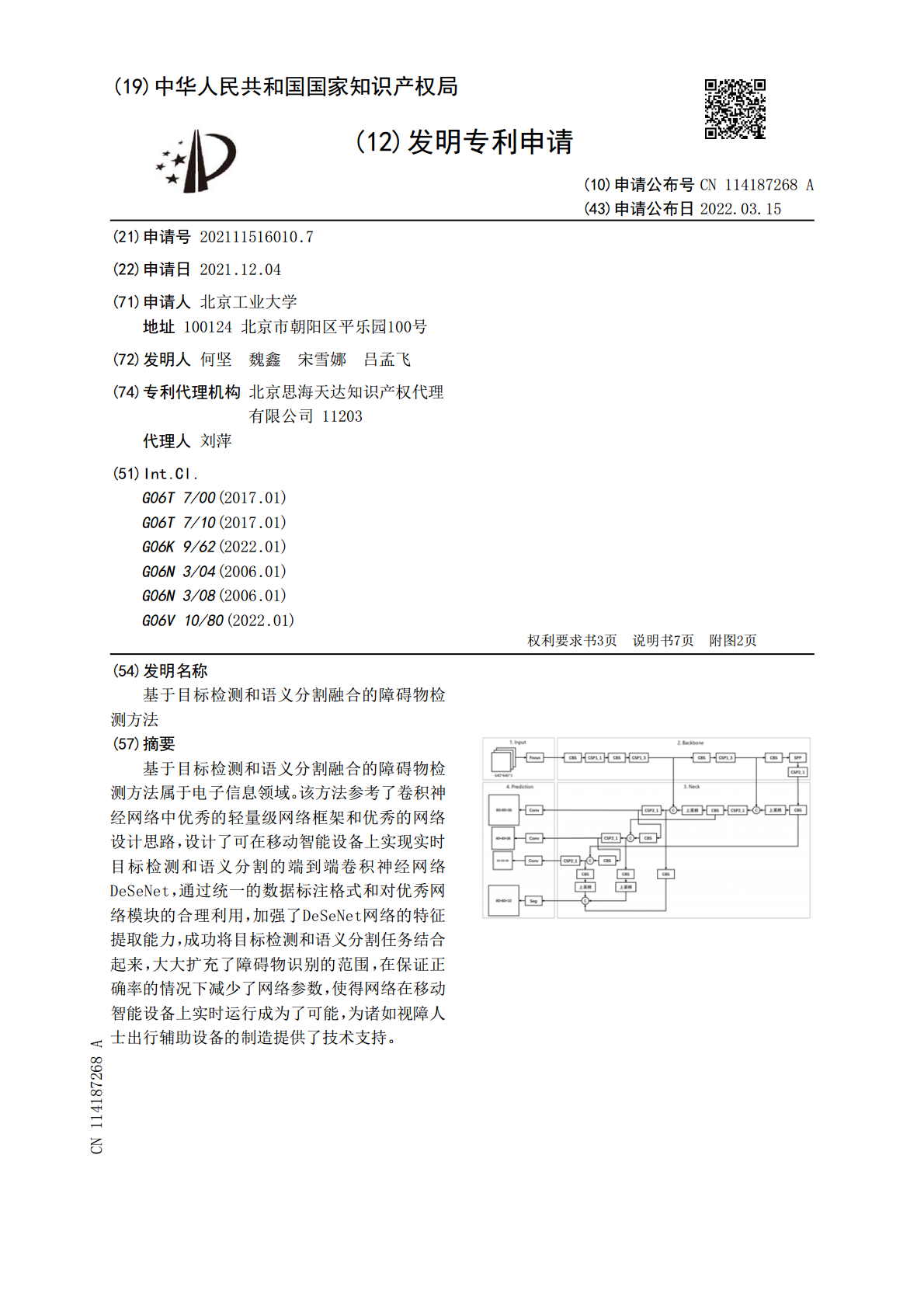
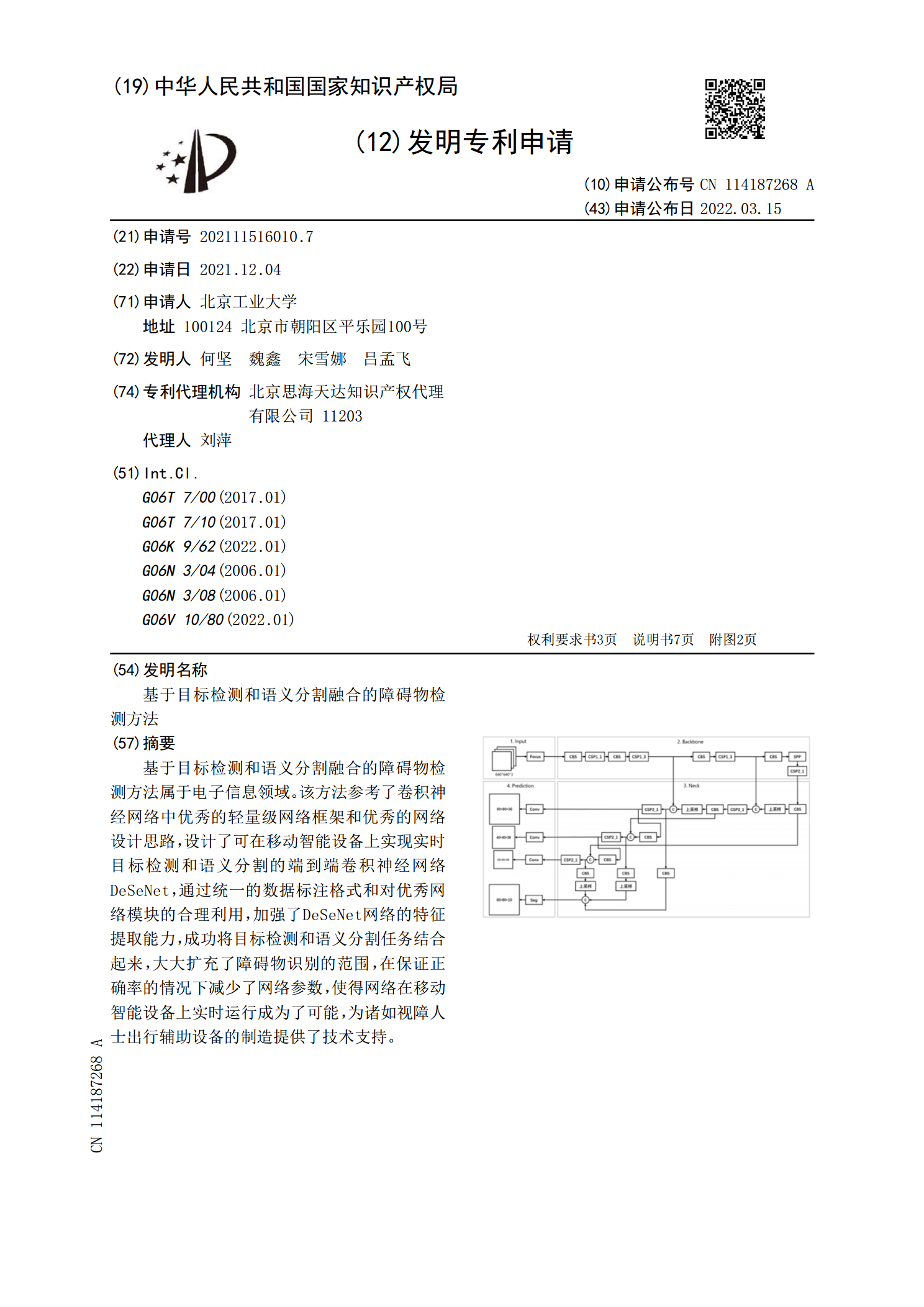
基于目标检测和语义分割融合的障碍物检测方法属于电子信息领域。该方法参考了卷积神经网络中优秀的轻量级网络框架和优秀的网络设计思路,设计了可在移动智能设备上实现实时目标检测和语义分割的端到端卷积神经网络DeSeNet,通过统一的数据标注格式和对优秀网络模块的合理利用,加强了DeSeNet网络的特征提取能力,成功将目标检测和语义分割任务结合起来,大大扩充了障碍物识别的范围,在保证正确率的情况下减少了网络参数,使得网络在移动智能设备上实时运行成为了可能,为诸如视障人士出行辅助设备的制造提供了技术支持。
一种基于语义分割和目标检测融合模型的工业缺陷检测方法.pdf
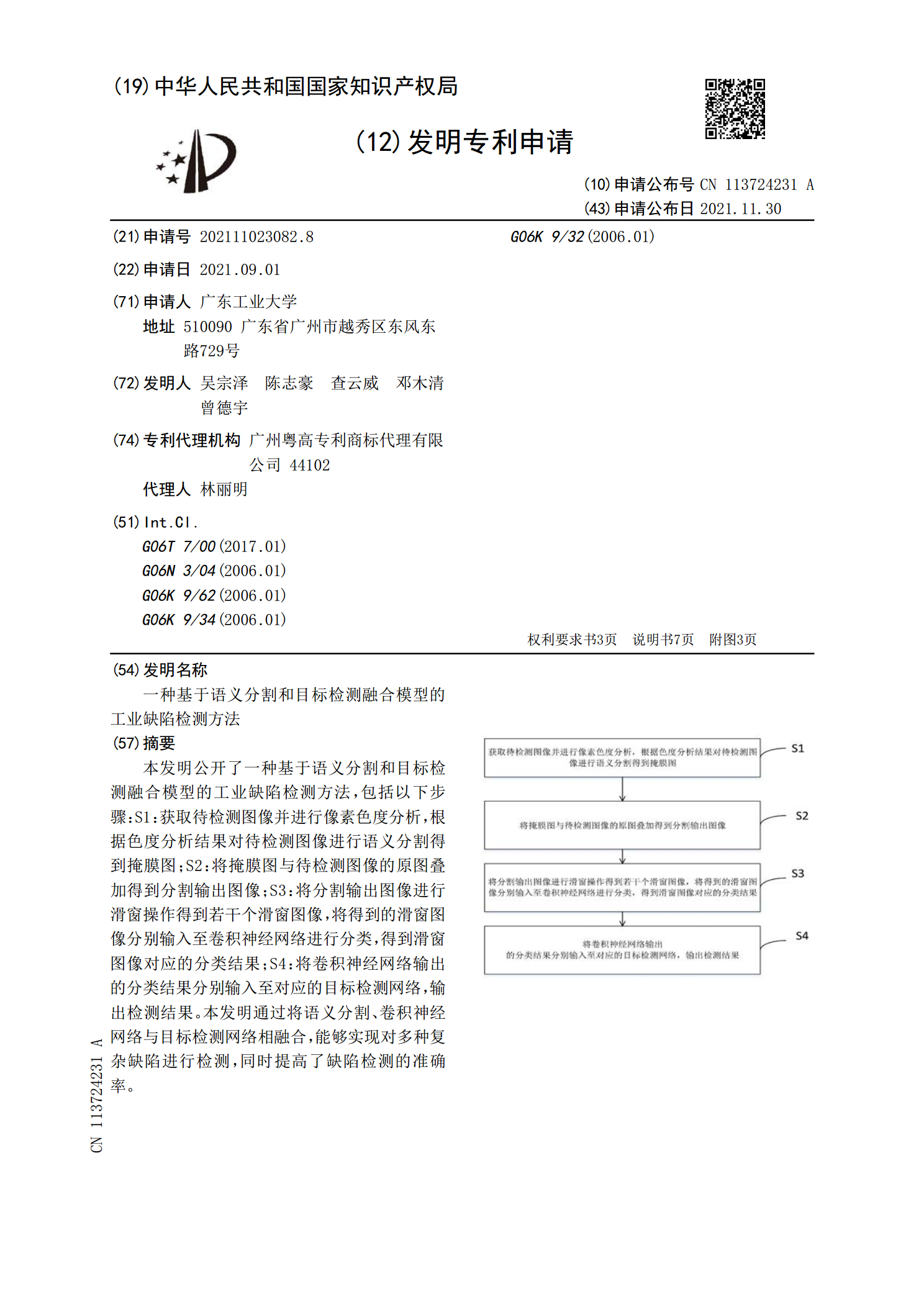
本发明公开了一种基于语义分割和目标检测融合模型的工业缺陷检测方法,包括以下步骤:S1:获取待检测图像并进行像素色度分析,根据色度分析结果对待检测图像进行语义分割得到掩膜图;S2:将掩膜图与待检测图像的原图叠加得到分割输出图像;S3:将分割输出图像进行滑窗操作得到若干个滑窗图像,将得到的滑窗图像分别输入至卷积神经网络进行分类,得到滑窗图像对应的分类结果;S4:将卷积神经网络输出的分类结果分别输入至对应的目标检测网络,输出检测结果。本发明通过将语义分割、卷积神经网络与目标检测网络相融合,能够实现对多种复杂缺陷
基于语义分割和目标检测的绝缘子缺陷检测方法.pdf
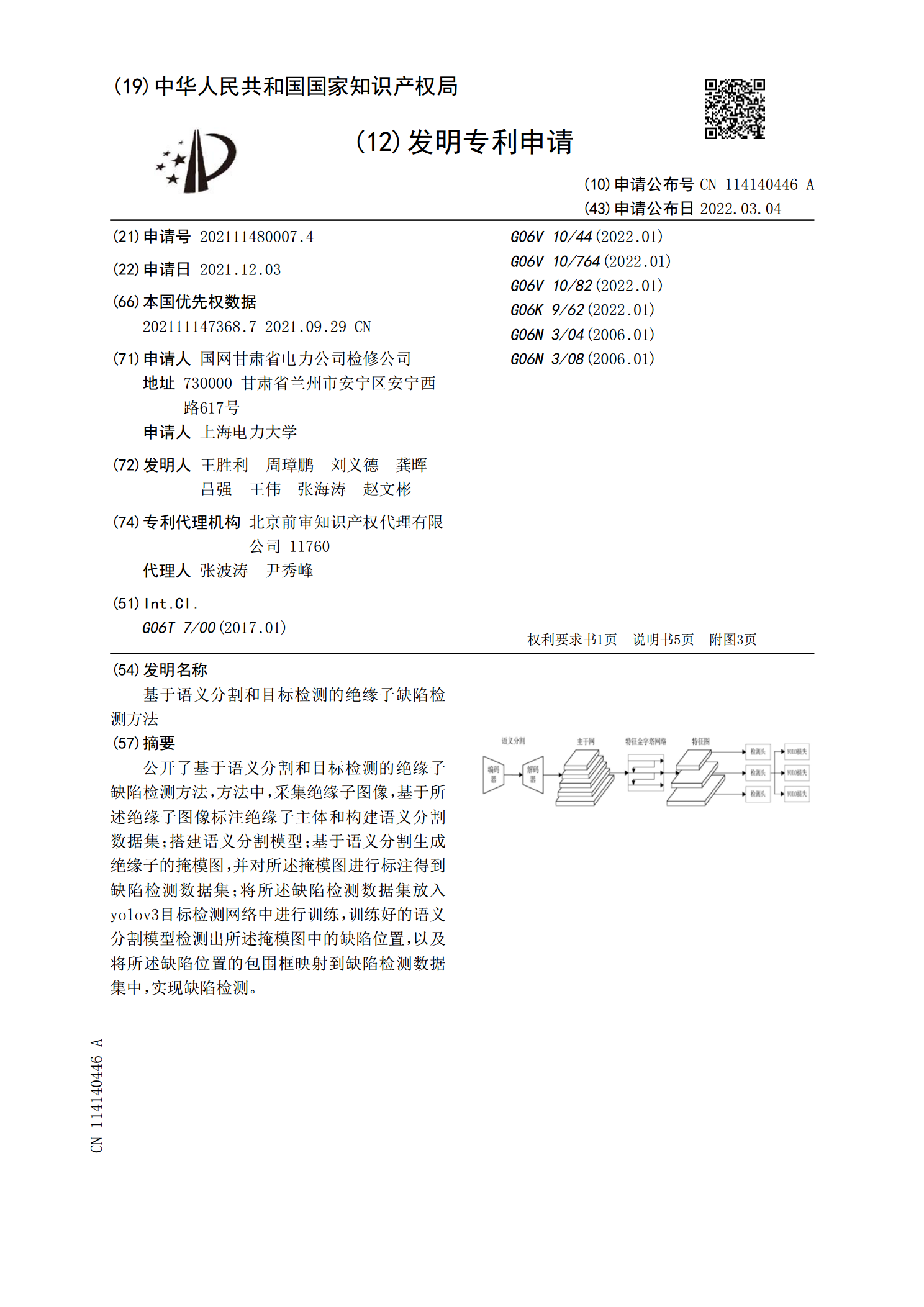
公开了基于语义分割和目标检测的绝缘子缺陷检测方法,方法中,采集绝缘子图像,基于所述绝缘子图像标注绝缘子主体和构建语义分割数据集;搭建语义分割模型;基于语义分割生成绝缘子的掩模图,并对所述掩模图进行标注得到缺陷检测数据集;将所述缺陷检测数据集放入yolov3目标检测网络中进行训练,训练好的语义分割模型检测出所述掩模图中的缺陷位置,以及将所述缺陷位置的包围框映射到缺陷检测数据集中,实现缺陷检测。

无人驾驶车辆基于语义分割方法障碍物检测.docx
无人驾驶车辆基于语义分割方法障碍物检测标题:基于语义分割方法的无人驾驶车辆障碍物检测摘要:随着无人驾驶技术的迅速发展,无人驾驶车辆的安全性和可靠性成为关注的焦点。其中,准确有效的障碍物检测是确保车辆行驶安全的重要环节。本论文基于语义分割方法,探讨了在无人驾驶车辆中实现准确、高效的障碍物检测的关键技术和方法。1.引言障碍物检测是无人驾驶车辆中最关键的任务之一,它能够准确识别道路上的人、车、建筑物等障碍物,并通过路径规划、避障等方式确保车辆的安全行驶。传统的障碍物检测方法主要依赖于图像处理和计算机视觉技术,但
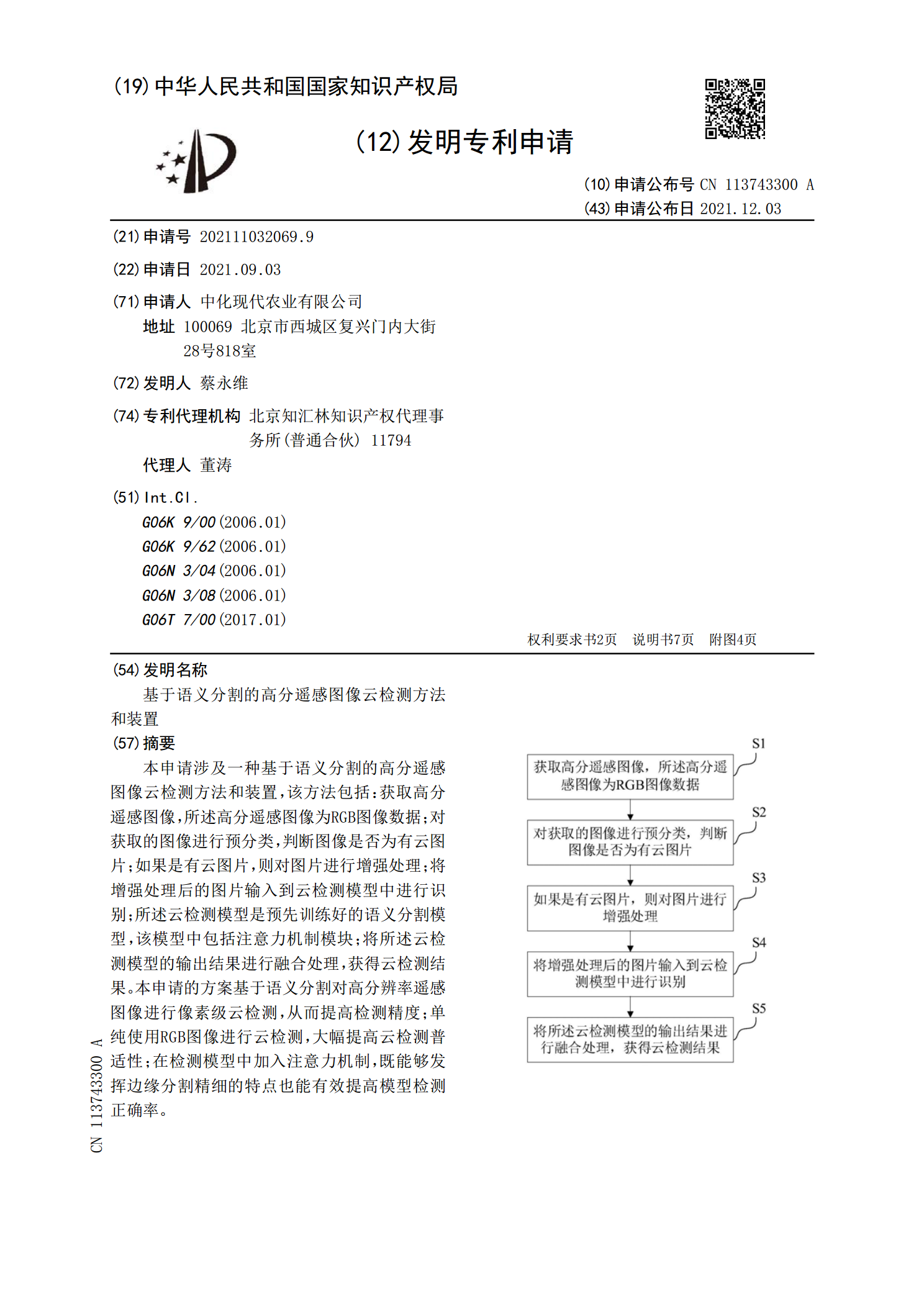
基于语义分割的高分遥感图像云检测方法和装置.pdf
本申请涉及一种基于语义分割的高分遥感图像云检测方法和装置,该方法包括:获取高分遥感图像,所述高分遥感图像为RGB图像数据;对获取的图像进行预分类,判断图像是否为有云图片;如果是有云图片,则对图片进行增强处理;将增强处理后的图片输入到云检测模型中进行识别;所述云检测模型是预先训练好的语义分割模型,该模型中包括注意力机制模块;将所述云检测模型的输出结果进行融合处理,获得云检测结果。本申请的方案基于语义分割对高分辨率遥感图像进行像素级云检测,从而提高检测精度;单纯使用RGB图像进行云检测,大幅提高云检测普适性;