
一种基于图像分割的障碍物提取方法、系统和智能终端.pdf

闪闪****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于图像分割的障碍物提取方法、系统和智能终端.pdf
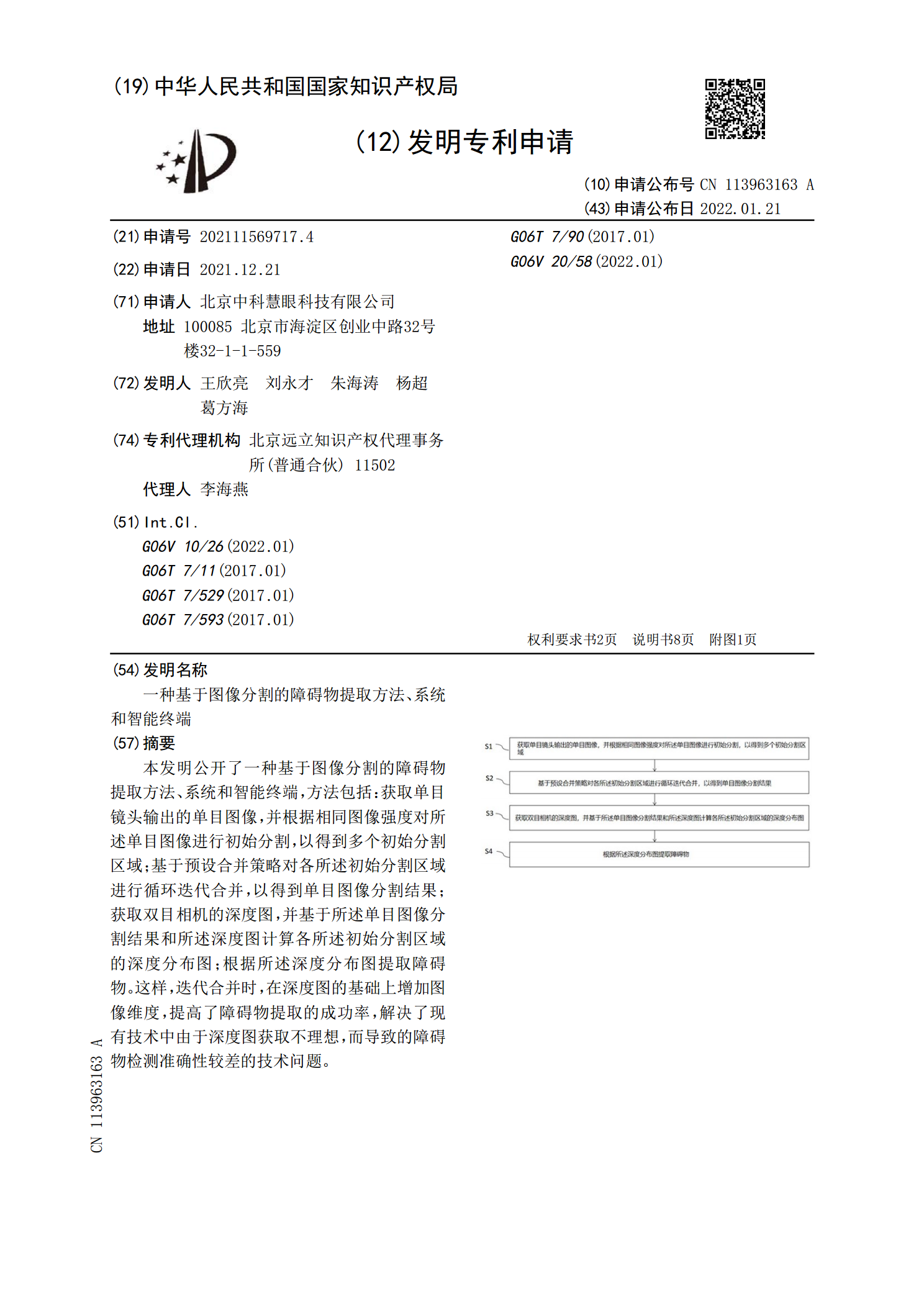
本发明公开了一种基于图像分割的障碍物提取方法、系统和智能终端,方法包括:获取单目镜头输出的单目图像,并根据相同图像强度对所述单目图像进行初始分割,以得到多个初始分割区域;基于预设合并策略对各所述初始分割区域进行循环迭代合并,以得到单目图像分割结果;获取双目相机的深度图,并基于所述单目图像分割结果和所述深度图计算各所述初始分割区域的深度分布图;根据所述深度分布图提取障碍物。这样,迭代合并时,在深度图的基础上增加图像维度,提高了障碍物提取的成功率,解决了现有技术中由于深度图获取不理想,而导致的障碍物检测准确性

基于运动栅格的障碍物检测方法、系统和智能终端.pdf
本发明公开了一种基于运动栅格的障碍物检测方法、系统和智能终端,方法包括:获取双目相机的视差图,并经过路面删除处理后将视差图数据投影到栅格地图上;生成运动粒子,并基于栅格地图和概率计算得到理论栅格粒子数量;对运动粒子进行重采样修正,基于运动粒子的重采样修正结果,估算各个栅格的位置和速度;基于栅格聚类通过反投影得到障碍物目标。解决了现有技术中障碍物检测准确性较差的技术问题。
一种基于智能终端的图像拍摄方法及图像拍摄系统.pdf
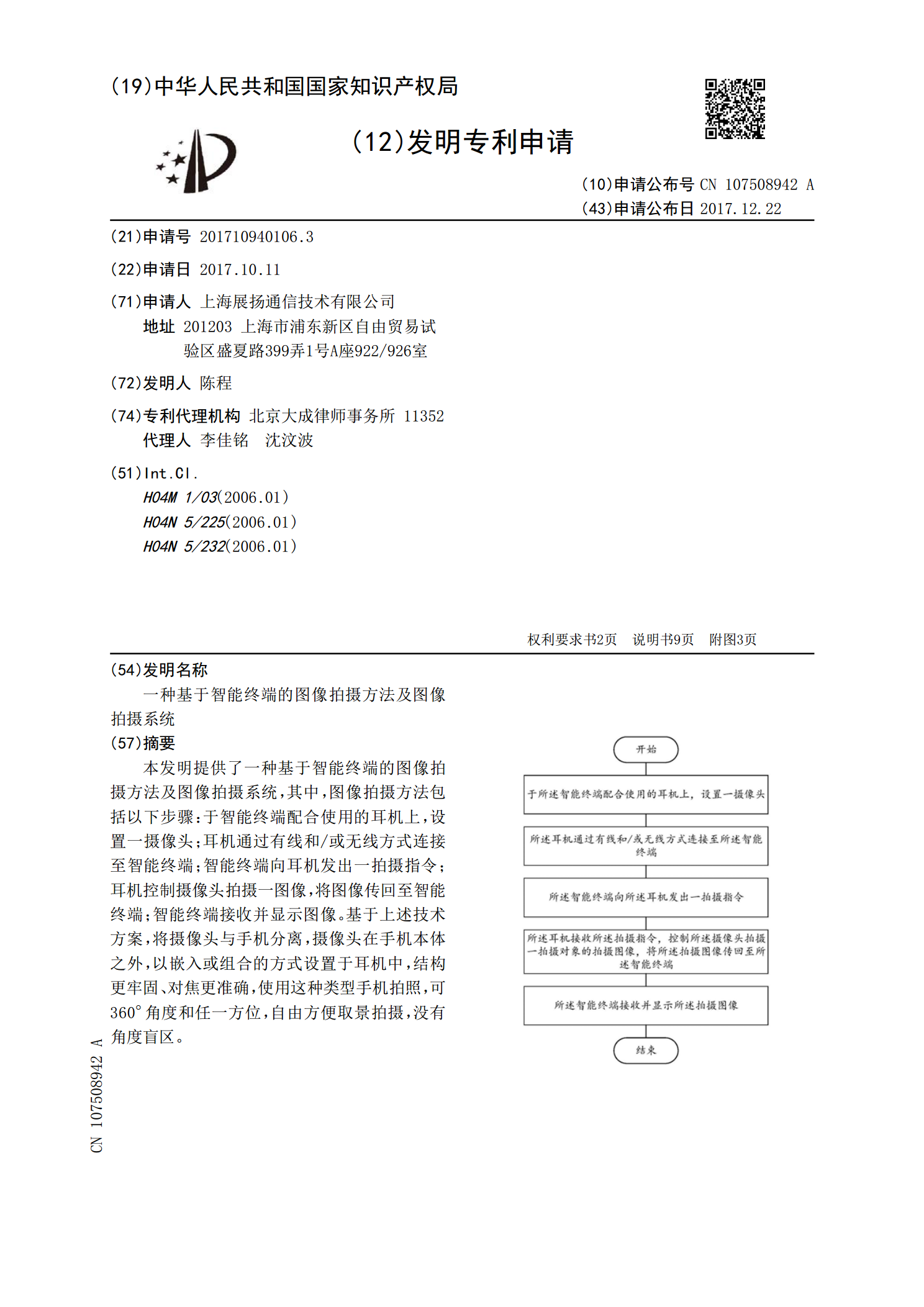
本发明提供了一种基于智能终端的图像拍摄方法及图像拍摄系统,其中,图像拍摄方法包括以下步骤:于智能终端配合使用的耳机上,设置一摄像头;耳机通过有线和/或无线方式连接至智能终端;智能终端向耳机发出一拍摄指令;耳机控制摄像头拍摄一图像,将图像传回至智能终端;智能终端接收并显示图像。基于上述技术方案,将摄像头与手机分离,摄像头在手机本体之外,以嵌入或组合的方式设置于耳机中,结构更牢固、对焦更准确,使用这种类型手机拍照,可360°角度和任一方位,自由方便取景拍摄,没有角度盲区。

一种图像分割方法和终端.pdf
本发明提出了一种图像分割方法和终端,该方法包括:获取待分割的原始图像数据,并对原始图像数据进行数据增强,生成第二图像数据;将原始图像数据与第二图像数据分别输入训练好的类U?net结构的分割网络进行识别,得到与原始图像数据对应的第一概率图,以及与第二图像数据对应的第二概率图;基于第一概率图对多个第二概率图进行融合得到预测增强概率图;对预测增强分割概率图进行二值化处理得到图像分割结果。本方法能实现较精准的结节图像分割,不易受超声影像成像质量差的影响,且本方法通过预测增强技术,在无须训练多个模型且不提高单模型本
一种用于遥感图像语义分割的特征提取方法和分割系统.pdf
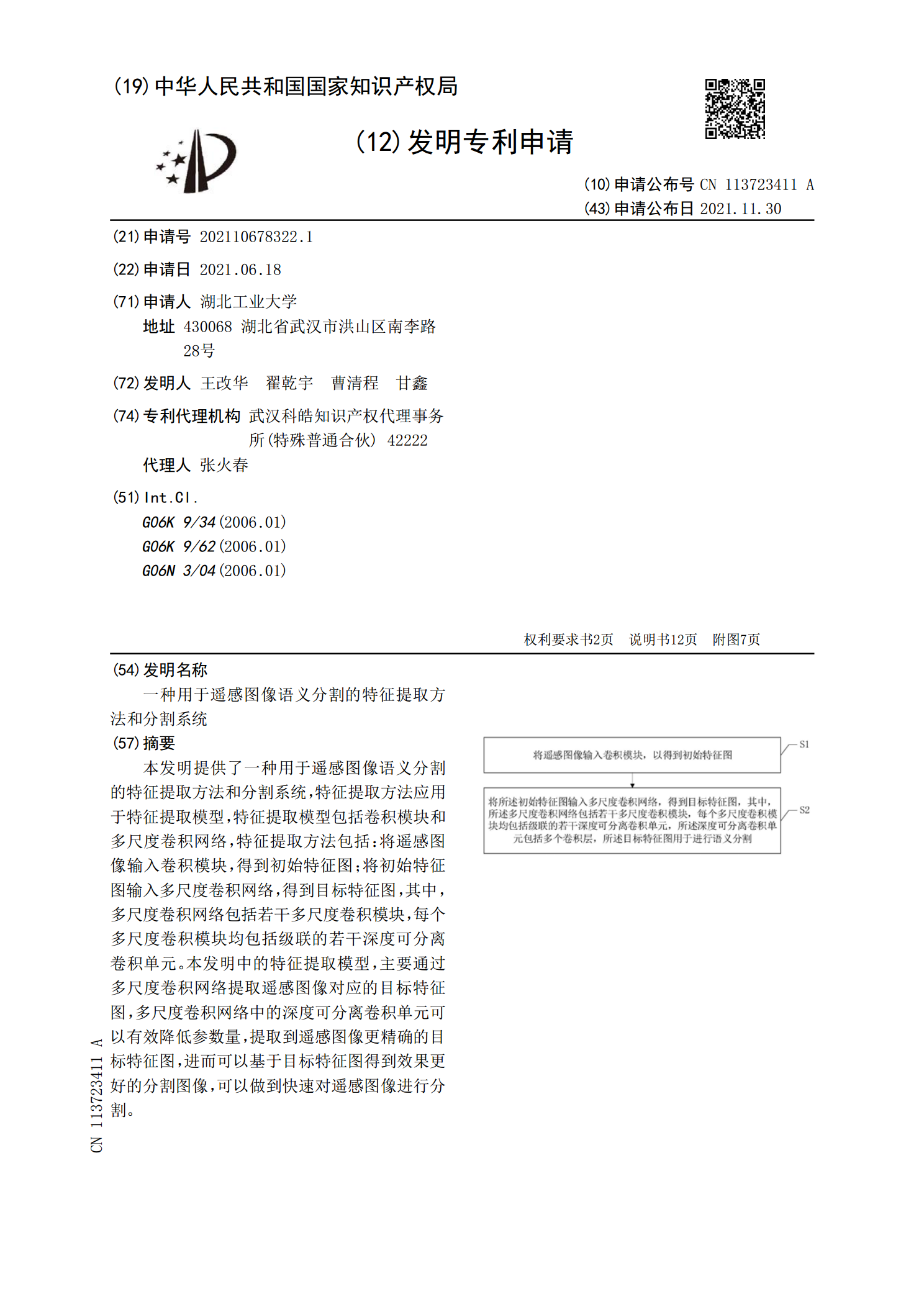
本发明提供了一种用于遥感图像语义分割的特征提取方法和分割系统,特征提取方法应用于特征提取模型,特征提取模型包括卷积模块和多尺度卷积网络,特征提取方法包括:将遥感图像输入卷积模块,得到初始特征图;将初始特征图输入多尺度卷积网络,得到目标特征图,其中,多尺度卷积网络包括若干多尺度卷积模块,每个多尺度卷积模块均包括级联的若干深度可分离卷积单元。本发明中的特征提取模型,主要通过多尺度卷积网络提取遥感图像对应的目标特征图,多尺度卷积网络中的深度可分离卷积单元可以有效降低参数量,提取到遥感图像更精确的目标特征图,进而