
一种纯电动车辆的驱动控制方法和装置.pdf

是你****松呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种纯电动车辆的驱动控制方法和装置.pdf
本发明实施例公开了一种纯电动车辆的驱动控制方法和装置,该驱动控制方法包括:根据纯电动车辆的电动机的转子转速计算得出轮速当量车速v

纯电动车辆控制方法、装置、设备、储存介质和车辆.pdf
本发明所述的一种纯电动车辆控制方法、装置、设备、储存介质和车辆,通过接收驻留开启指令,根据短时驻留开启指令,检测到驾驶员离开车辆且车辆电源关闭后,向电子控制系统发送关闭指令并控制供电系统保持向辅助电器系统供电,从而使所述辅助电器系统保持车内环境稳定。
一种纯电动汽车驱动装置及驱动方法.pdf
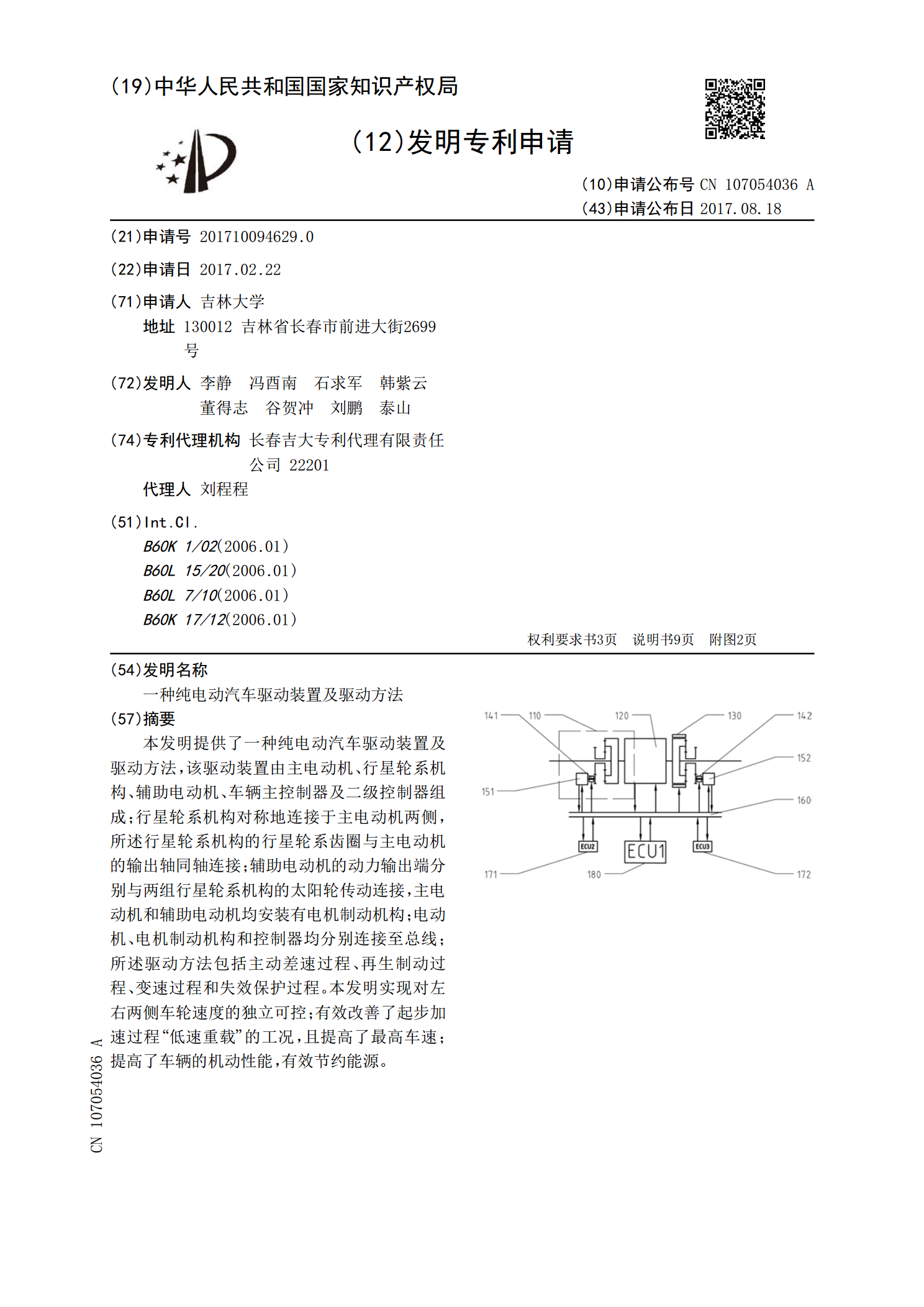
本发明提供了一种纯电动汽车驱动装置及驱动方法,该驱动装置由主电动机、行星轮系机构、辅助电动机、车辆主控制器及二级控制器组成;行星轮系机构对称地连接于主电动机两侧,所述行星轮系机构的行星轮系齿圈与主电动机的输出轴同轴连接;辅助电动机的动力输出端分别与两组行星轮系机构的太阳轮传动连接,主电动机和辅助电动机均安装有电机制动机构;电动机、电机制动机构和控制器均分别连接至总线;所述驱动方法包括主动差速过程、再生制动过程、变速过程和失效保护过程。本发明实现对左右两侧车轮速度的独立可控;有效改善了起步加速过程“低速重载

后轮驱动纯电动车辆制动能量回收控制方法及装置.pdf
本发明涉及电动车辆技术领域,具体涉及一种后轮驱动纯电动车辆制动能量回收控制方法及装置,该方法包括制动能量回收模式判断步骤、最大再生制动力计算步骤、需求制动力计算步骤、制动力分配步骤及防抱死判断步骤;在汽车制动过程中,控制机械制动力和再生制动力分配,在保证制动安全和制动效能的基础上,最大限度的提升再生制动力分配系数,充分利用电机的馈电能力回收制动过程中损耗的能量给动力电池充电,提升制动能量回收效率,减少制动能量损耗,优化车辆续驶里程。

一种纯电动客车驱动控制方法.pdf
本发明提供一种纯电动客车驱动控制方法,其先对客车起步的各个信号进行采集与验证,检测车轮附着系数和滑移率,采集客车方向盘的转向力矩以及转向角度,采集路况,并利用上述的各个参数信息采用PID对各个车轮进行驱动控制,该方法从多个方面考虑纯电动客车驱动的安全性能以及节能性能,能够有效的确保电动客车的安全性,通过深入研究电动客车的附着系数、轮胎侧偏刚度以及路况信息,对各个参数综合起来,实时修正各个车轮驱动力,既保证了纯电动客车行驶的平稳性,又保证了纯电动客车运行的安全性能和稳定性。