
一种悬挂式巡检机器人控制方法.pdf

和裕****az

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种悬挂式巡检机器人控制方法.pdf
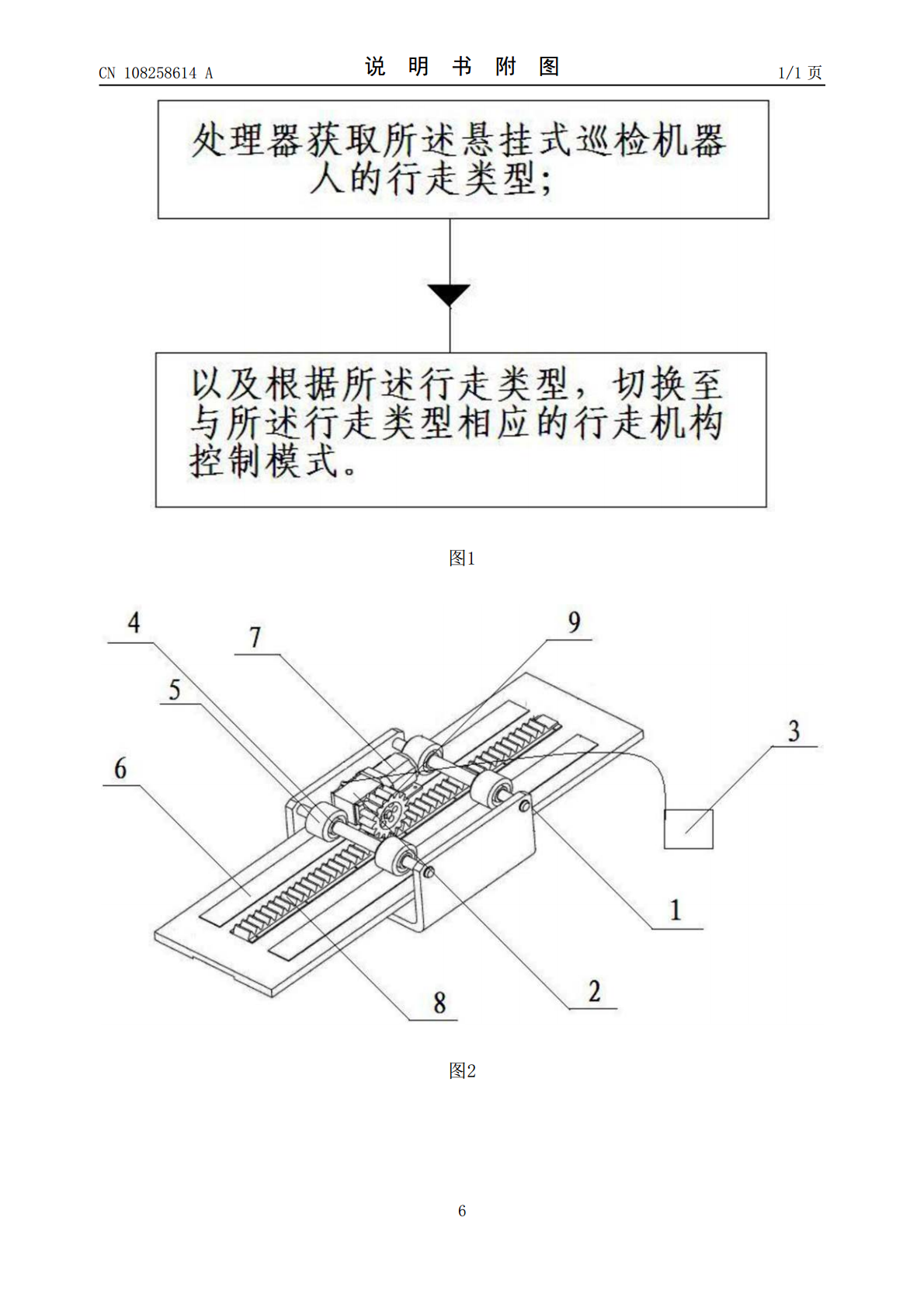
本发明公开了一种悬挂式巡检机器人控制方法,应用在悬挂式巡检机器人上,其特征在于,包括如下步骤:处理器获取所述悬挂式巡检机器人的行走类型;以及根据所述行走类型,切换至与所述行走类型相应的行走机构控制模式。本发明提供的悬挂式巡检机器人的控制方法可以根据巡检作业环境选择齿轮齿条啮合行走或者滚轮导轨滑动行走模式,根据巡检作业环境阻力控制悬挂式巡检机器人克服因天气和地形造成的高空巡检风阻大、低空巡检风阻小的环境阻碍,实现对于悬挂式巡检机器人的通用性使用。
一种悬挂式巡检机器人控制系统.pdf
本发明公开了一种悬挂式巡检机器人控制系统,应用在悬挂式巡检机器人上,包括处理器、遥控发射器、遥控接收器、行走传感器,所述处理器、所述行走传感器与所述遥控接收器均安装在所述悬挂式巡检机器人上,所述处理器分别与所述遥控接收器、所述行走传感器通信连接,所述遥控发射器与所述遥控接收器通信连接,所述悬挂式巡检机器人上设置有行走用的齿轮齿条行走机构、滚轮导轨滑动机构。本发明提供的悬挂式巡检机器人的控制系统可以根据巡检作业环境选择齿轮齿条啮合行走或者滚轮导轨滑动行走模式,根据巡检作业环境阻力控制悬挂式巡检机器人克服因天
一种悬挂式单轨交通轨道梁巡检小车控制装置及控制方法.pdf
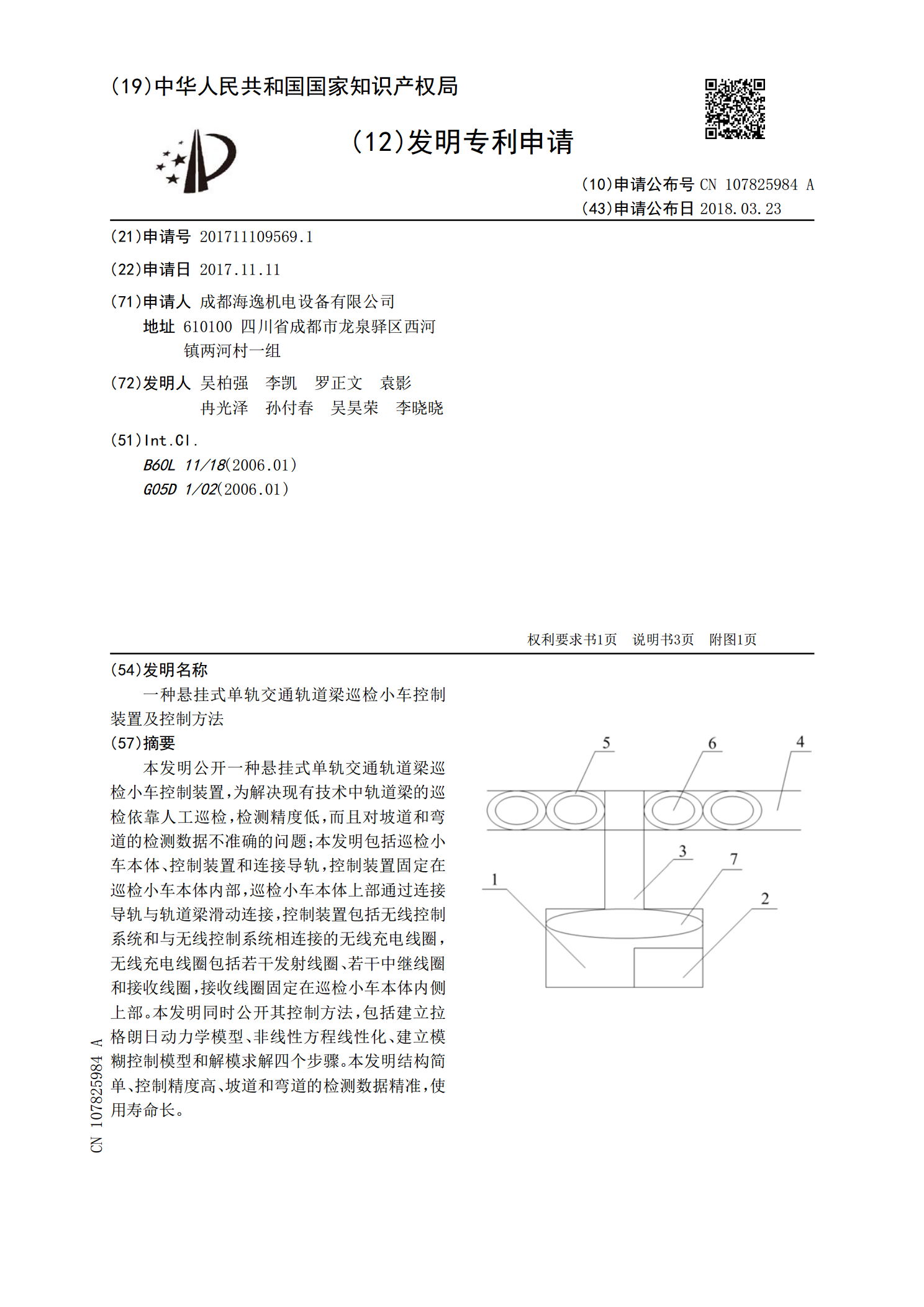
本发明公开一种悬挂式单轨交通轨道梁巡检小车控制装置,为解决现有技术中轨道梁的巡检依靠人工巡检,检测精度低,而且对坡道和弯道的检测数据不准确的问题;本发明包括巡检小车本体、控制装置和连接导轨,控制装置固定在巡检小车本体内部,巡检小车本体上部通过连接导轨与轨道梁滑动连接,控制装置包括无线控制系统和与无线控制系统相连接的无线充电线圈,无线充电线圈包括若干发射线圈、若干中继线圈和接收线圈,接收线圈固定在巡检小车本体内侧上部。本发明同时公开其控制方法,包括建立拉格朗日动力学模型、非线性方程线性化、建立模糊控制模型和
一种悬挂式单轨检测机器人及悬挂式单轨检测方法.pdf
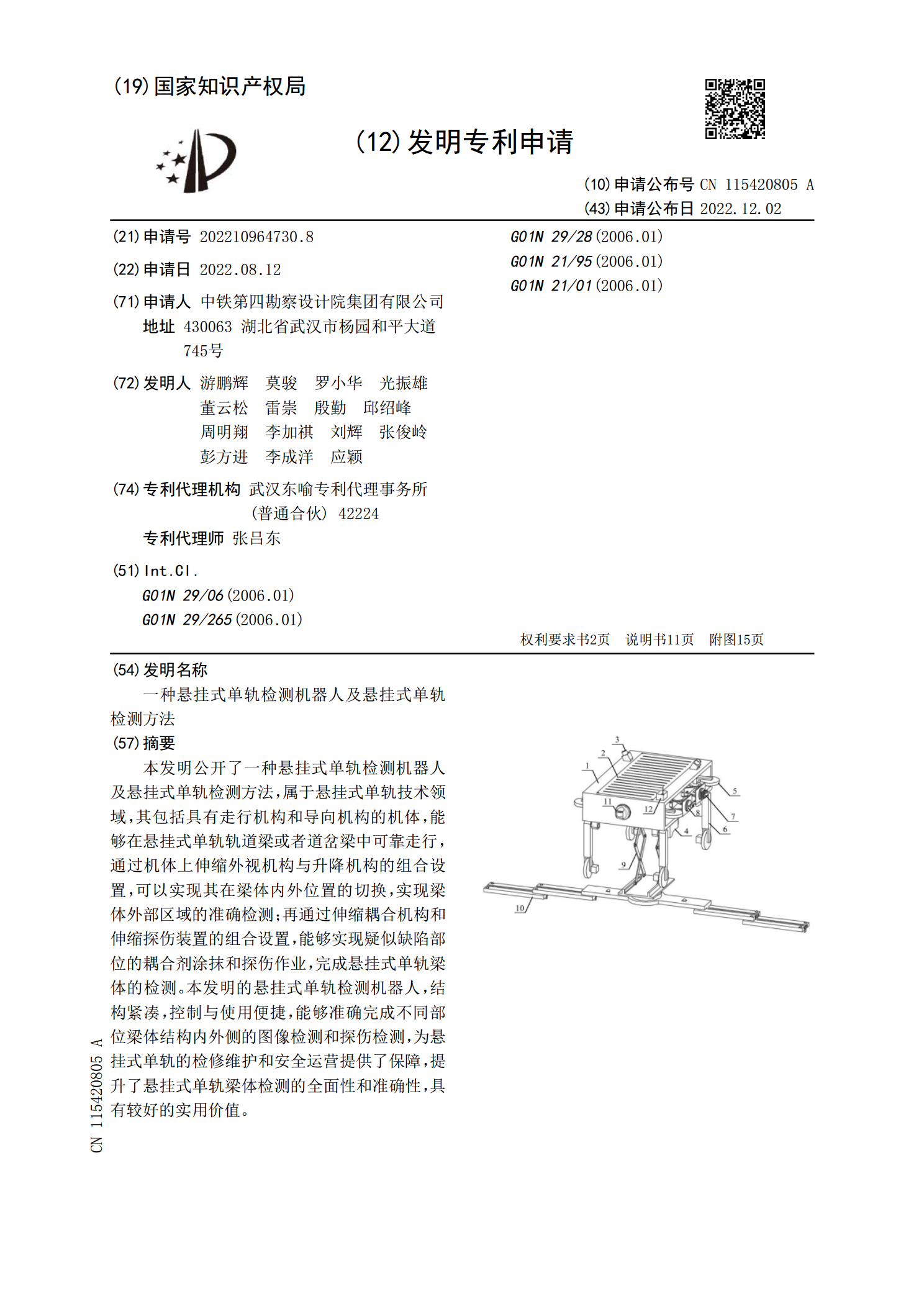
本发明公开了一种悬挂式单轨检测机器人及悬挂式单轨检测方法,属于悬挂式单轨技术领域,其包括具有走行机构和导向机构的机体,能够在悬挂式单轨轨道梁或者道岔梁中可靠走行,通过机体上伸缩外视机构与升降机构的组合设置,可以实现其在梁体内外位置的切换,实现梁体外部区域的准确检测;再通过伸缩耦合机构和伸缩探伤装置的组合设置,能够实现疑似缺陷部位的耦合剂涂抹和探伤作业,完成悬挂式单轨梁体的检测。本发明的悬挂式单轨检测机器人,结构紧凑,控制与使用便捷,能够准确完成不同部位梁体结构内外侧的图像检测和探伤检测,为悬挂式单轨的检修
一种移动式巡检机器人及控制方法.pdf
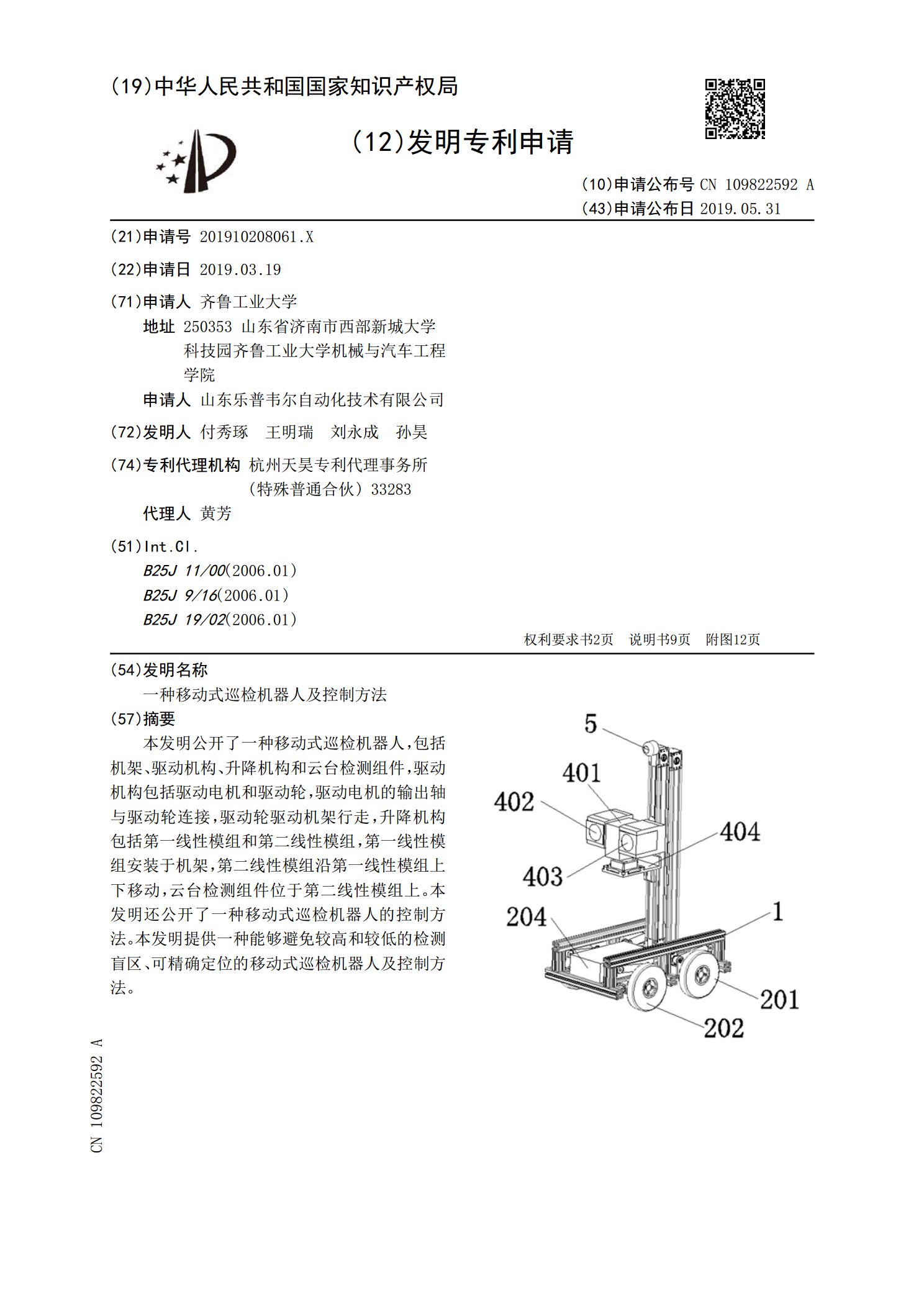
本发明公开了一种移动式巡检机器人,包括机架、驱动机构、升降机构和云台检测组件,驱动机构包括驱动电机和驱动轮,驱动电机的输出轴与驱动轮连接,驱动轮驱动机架行走,升降机构包括第一线性模组和第二线性模组,第一线性模组安装于机架,第二线性模组沿第一线性模组上下移动,云台检测组件位于第二线性模组上。本发明还公开了一种移动式巡检机器人的控制方法。本发明提供一种能够避免较高和较低的检测盲区、可精确定位的移动式巡检机器人及控制方法。