
一种悬挂式单轨检测机器人及悬挂式单轨检测方法.pdf

是翠****ng

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种悬挂式单轨检测机器人及悬挂式单轨检测方法.pdf
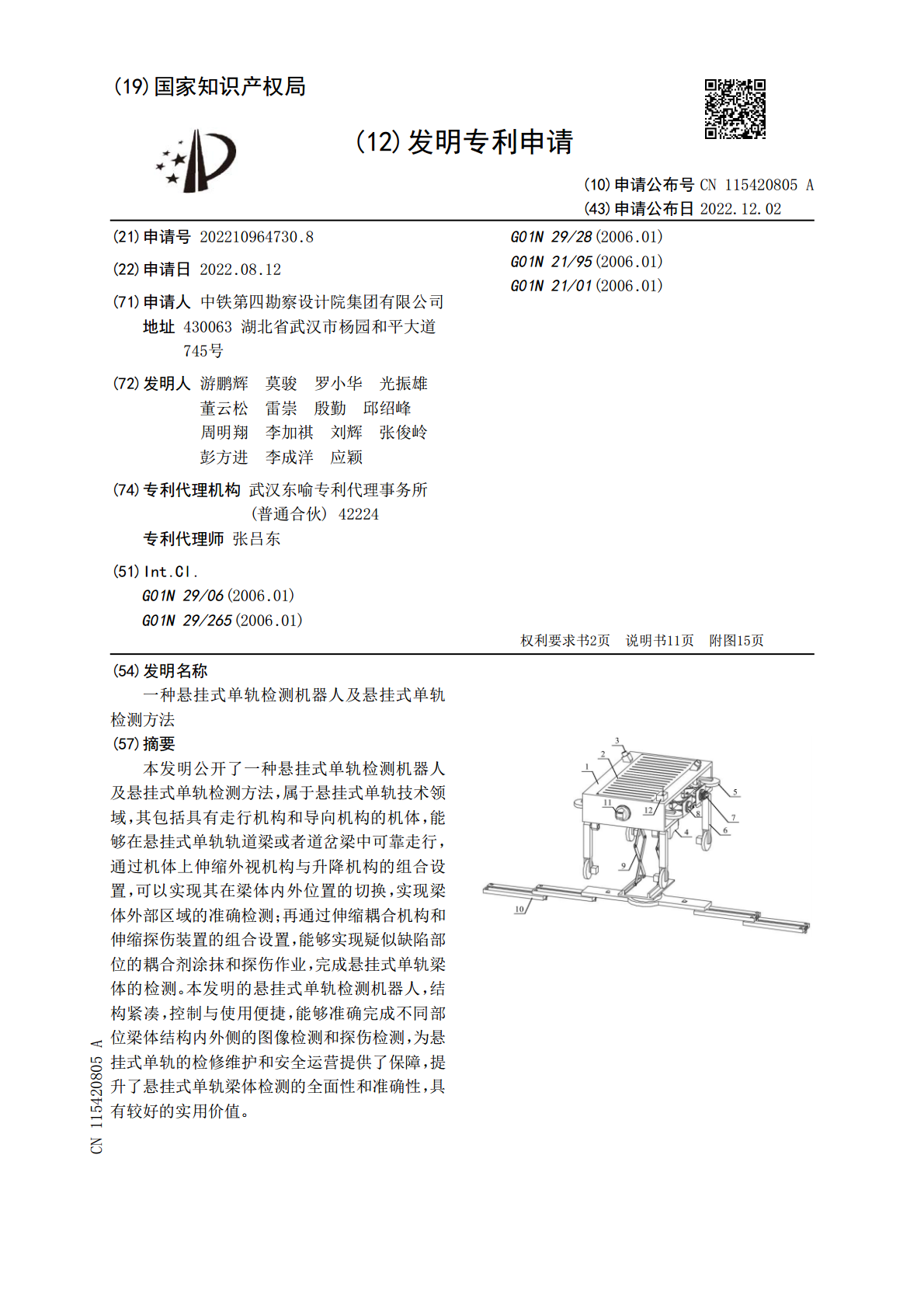
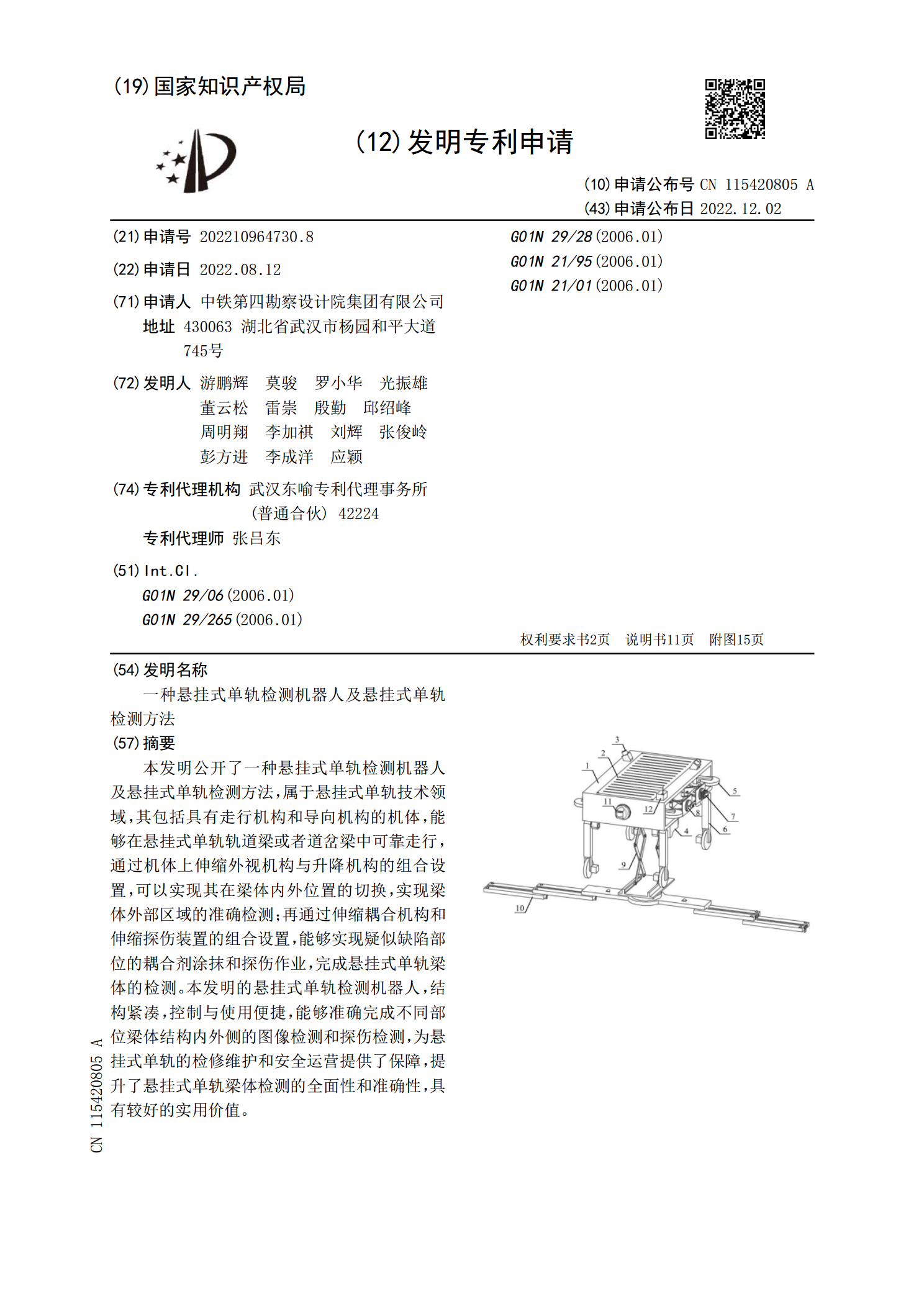
本发明公开了一种悬挂式单轨检测机器人及悬挂式单轨检测方法,属于悬挂式单轨技术领域,其包括具有走行机构和导向机构的机体,能够在悬挂式单轨轨道梁或者道岔梁中可靠走行,通过机体上伸缩外视机构与升降机构的组合设置,可以实现其在梁体内外位置的切换,实现梁体外部区域的准确检测;再通过伸缩耦合机构和伸缩探伤装置的组合设置,能够实现疑似缺陷部位的耦合剂涂抹和探伤作业,完成悬挂式单轨梁体的检测。本发明的悬挂式单轨检测机器人,结构紧凑,控制与使用便捷,能够准确完成不同部位梁体结构内外侧的图像检测和探伤检测,为悬挂式单轨的检修

一种悬挂式单轨小车和悬挂式单轨交通系统.pdf
本发明公开了一种悬挂式单轨小车和悬挂式单轨交通系统。悬挂式单轨小车包括车架、支重轮、左侧行走机构和右侧行走机构,行走机构包括轮系和升降机构,轮系包括支重轮;左侧行走机构和右侧行走机构分别布置在车架的两侧。单轨交通系统包括轨道和上述的悬挂式单轨小车,轨道包括左轨和右轨,左侧和右侧行走机构的支重轮分别在左轨和右轨上运行;轮系的主体部分布置在左轨和右轨的上方,升降机构的主体部分布置在左轨和右轨的下方;左轨和右轨之间存在空隙,轮系和升降机构通过该空隙连接。本发明单轨交通系统的岔道口无需设置活动轨,小车在进入岔道前
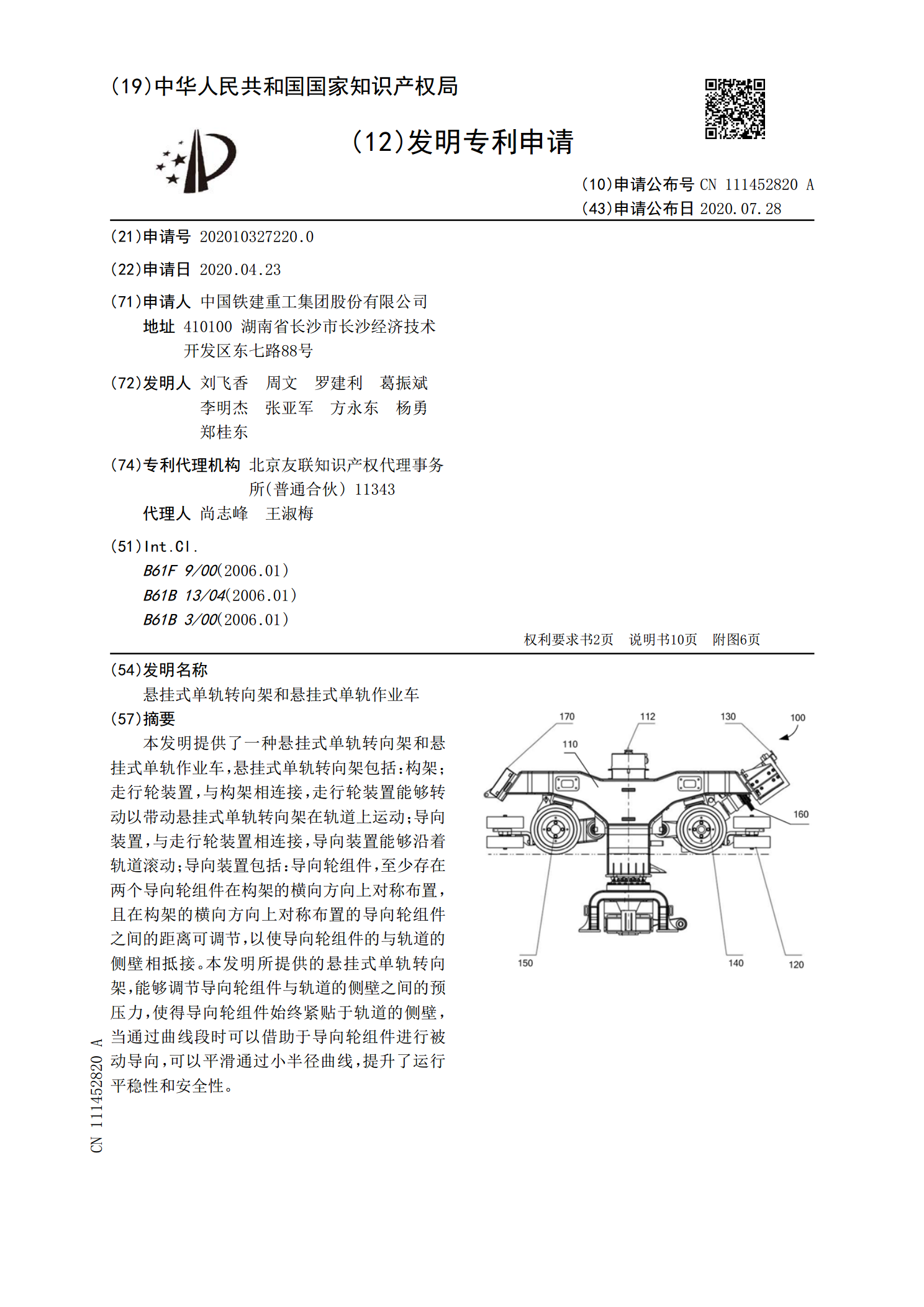
悬挂式单轨转向架和悬挂式单轨作业车.pdf
本发明提供了一种悬挂式单轨转向架和悬挂式单轨作业车,悬挂式单轨转向架包括:构架;走行轮装置,与构架相连接,走行轮装置能够转动以带动悬挂式单轨转向架在轨道上运动;导向装置,与走行轮装置相连接,导向装置能够沿着轨道滚动;导向装置包括:导向轮组件,至少存在两个导向轮组件在构架的横向方向上对称布置,且在构架的横向方向上对称布置的导向轮组件之间的距离可调节,以使导向轮组件的与轨道的侧壁相抵接。本发明所提供的悬挂式单轨转向架,能够调节导向轮组件与轨道的侧壁之间的预压力,使得导向轮组件始终紧贴于轨道的侧壁,当通过曲线段

基于FBG的悬挂式单轨列车位置检测方法研究.docx
基于FBG的悬挂式单轨列车位置检测方法研究随着城市化进程的不断加快,城市交通难题也越来越突出。为了高效地解决城市交通问题,各地都在不断地探索新的交通解决方案。单轨交通是一种高效、省空间、环保的交通方式,近年来在各地也得到越来越广泛的应用。然而,为了确保单轨列车在行驶过程中的安全和稳定性,需要实时检测单轨列车的位置和状态。本文将介绍一种基于FBG(FiberBraggGrating)的悬挂式单轨列车位置检测方法。一、FBG的原理及特点FBG是一种全光纤传感器,由于其在结构上具有光纤固有的优越性,被广泛应用于
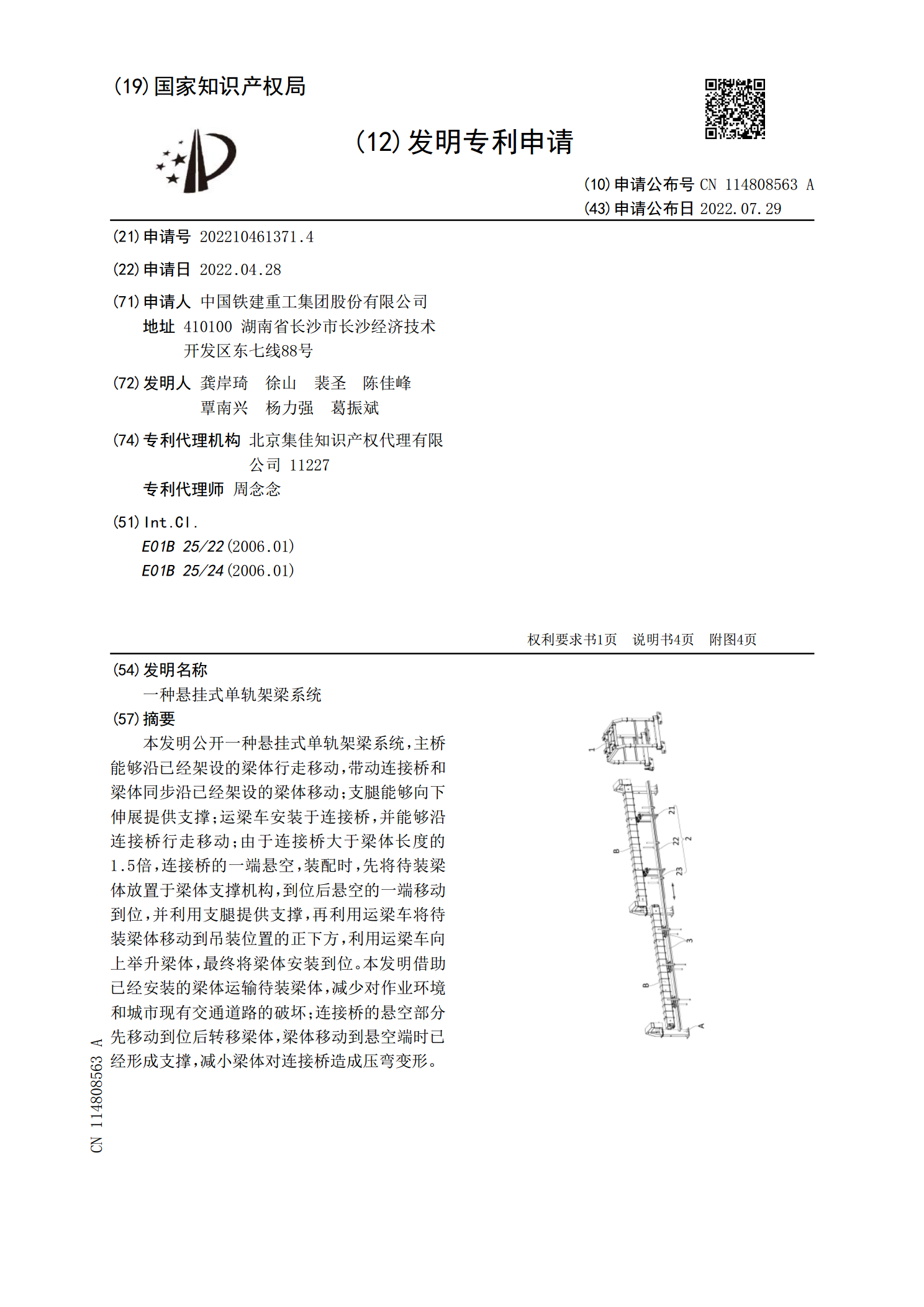
一种悬挂式单轨架梁系统.pdf
本发明公开一种悬挂式单轨架梁系统,主桥能够沿已经架设的梁体行走移动,带动连接桥和梁体同步沿已经架设的梁体移动;支腿能够向下伸展提供支撑;运梁车安装于连接桥,并能够沿连接桥行走移动;由于连接桥大于梁体长度的1.5倍,连接桥的一端悬空,装配时,先将待装梁体放置于梁体支撑机构,到位后悬空的一端移动到位,并利用支腿提供支撑,再利用运梁车将待装梁体移动到吊装位置的正下方,利用运梁车向上举升梁体,最终将梁体安装到位。本发明借助已经安装的梁体运输待装梁体,减少对作业环境和城市现有交通道路的破坏;连接桥的悬空部分先移动到