
AGV旋转顶升机构.pdf

努力****采萍

1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
AGV旋转顶升机构.pdf
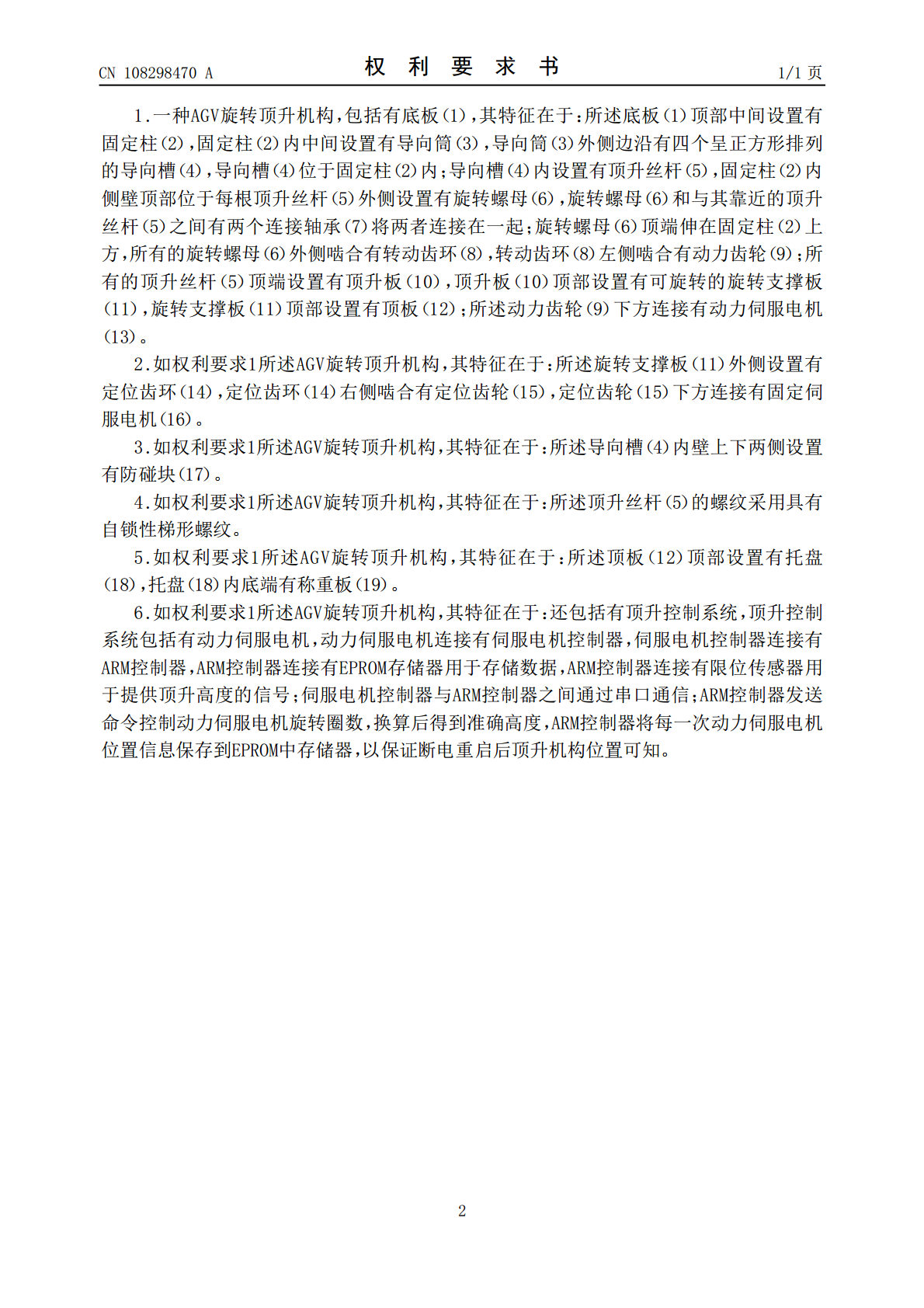
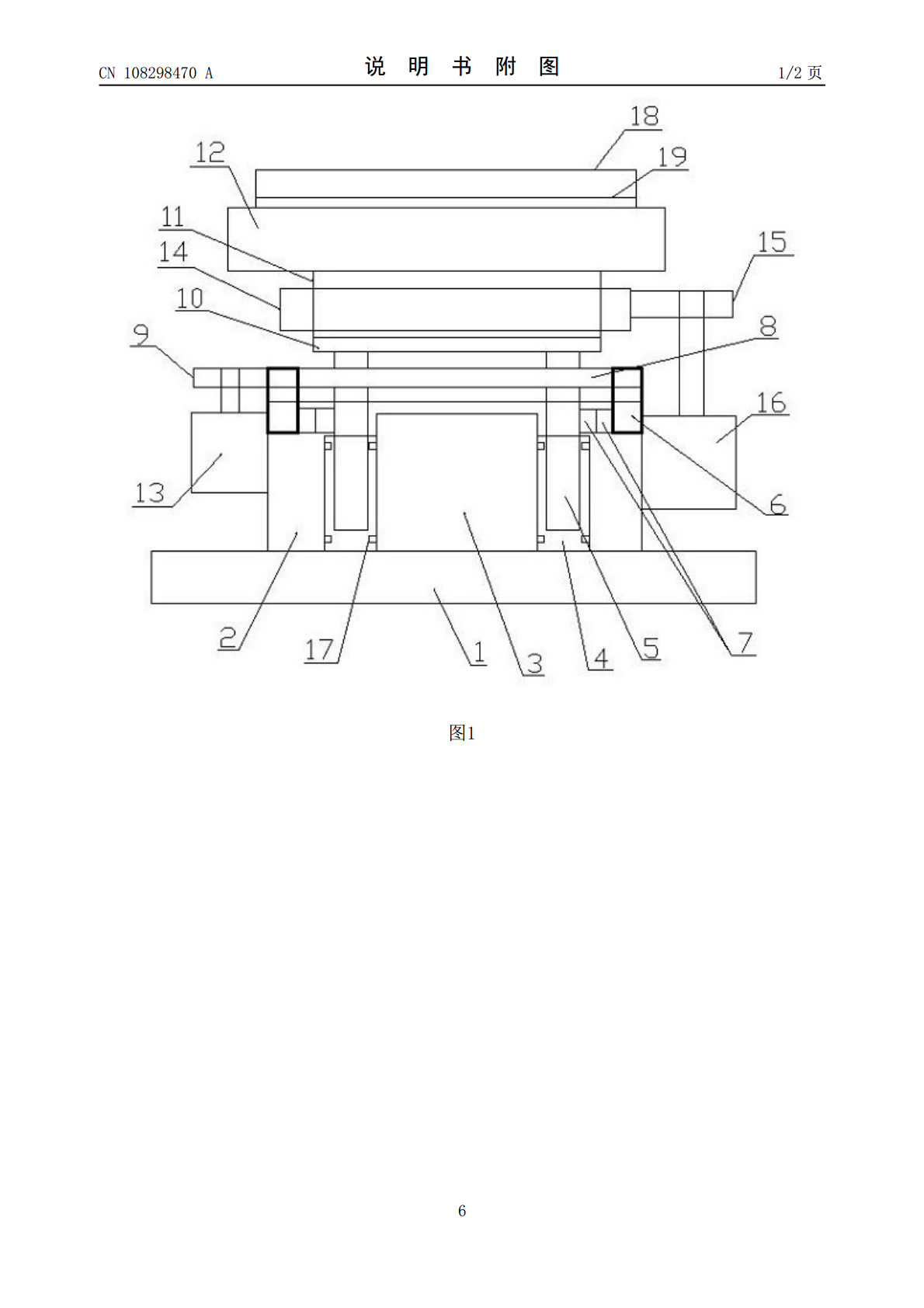
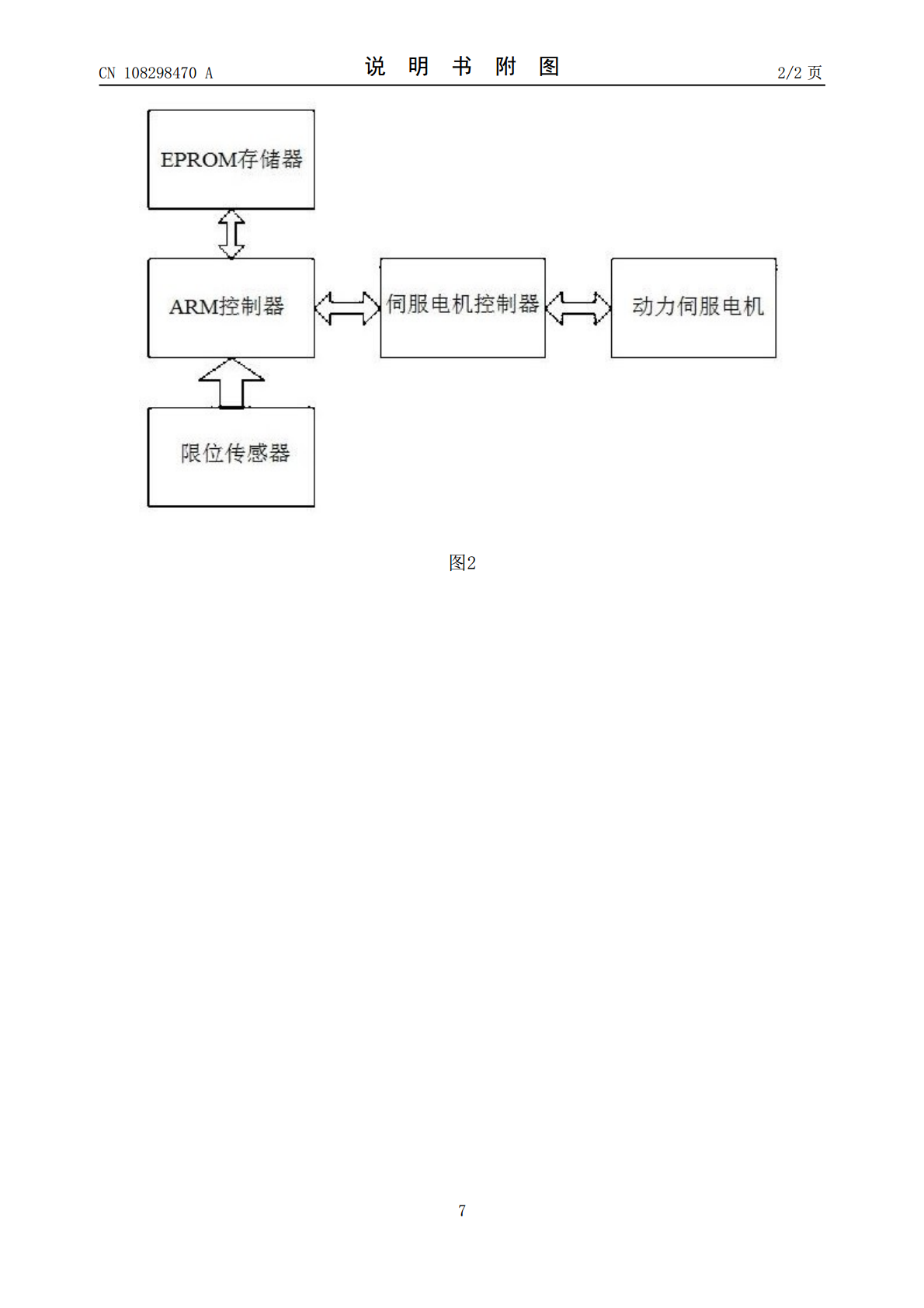
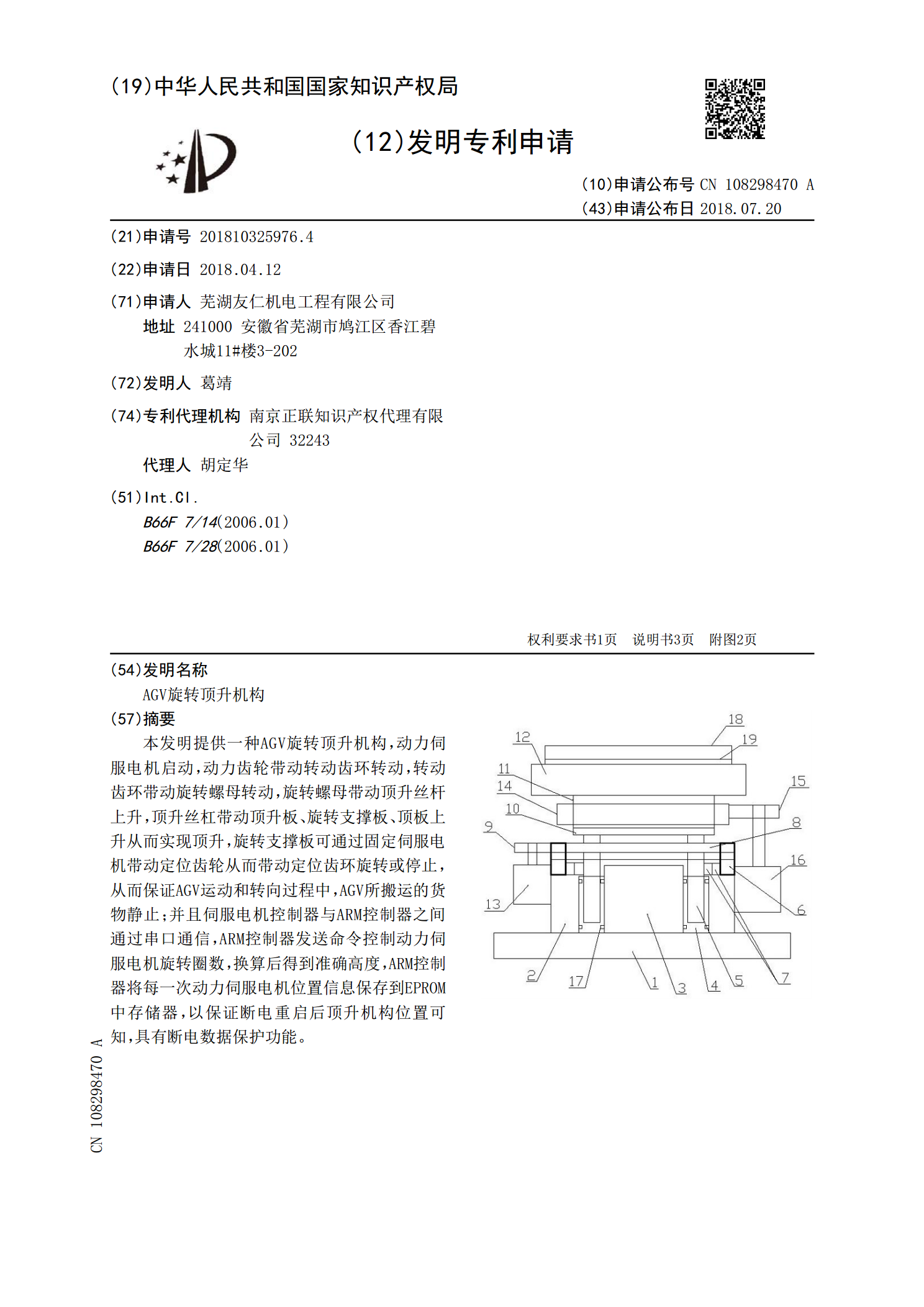
本发明提供一种AGV旋转顶升机构,动力伺服电机启动,动力齿轮带动转动齿环转动,转动齿环带动旋转螺母转动,旋转螺母带动顶升丝杆上升,顶升丝杠带动顶升板、旋转支撑板、顶板上升从而实现顶升,旋转支撑板可通过固定伺服电机带动定位齿轮从而带动定位齿环旋转或停止,从而保证AGV运动和转向过程中,AGV所搬运的货物静止;并且伺服电机控制器与ARM控制器之间通过串口通信,ARM控制器发送命令控制动力伺服电机旋转圈数,换算后得到准确高度,ARM控制器将每一次动力伺服电机位置信息保存到EPROM中存储器,以保证断电重启后顶升
一种旋转顶升机构及包含该旋转顶升机构的潜伏式AGV.pdf
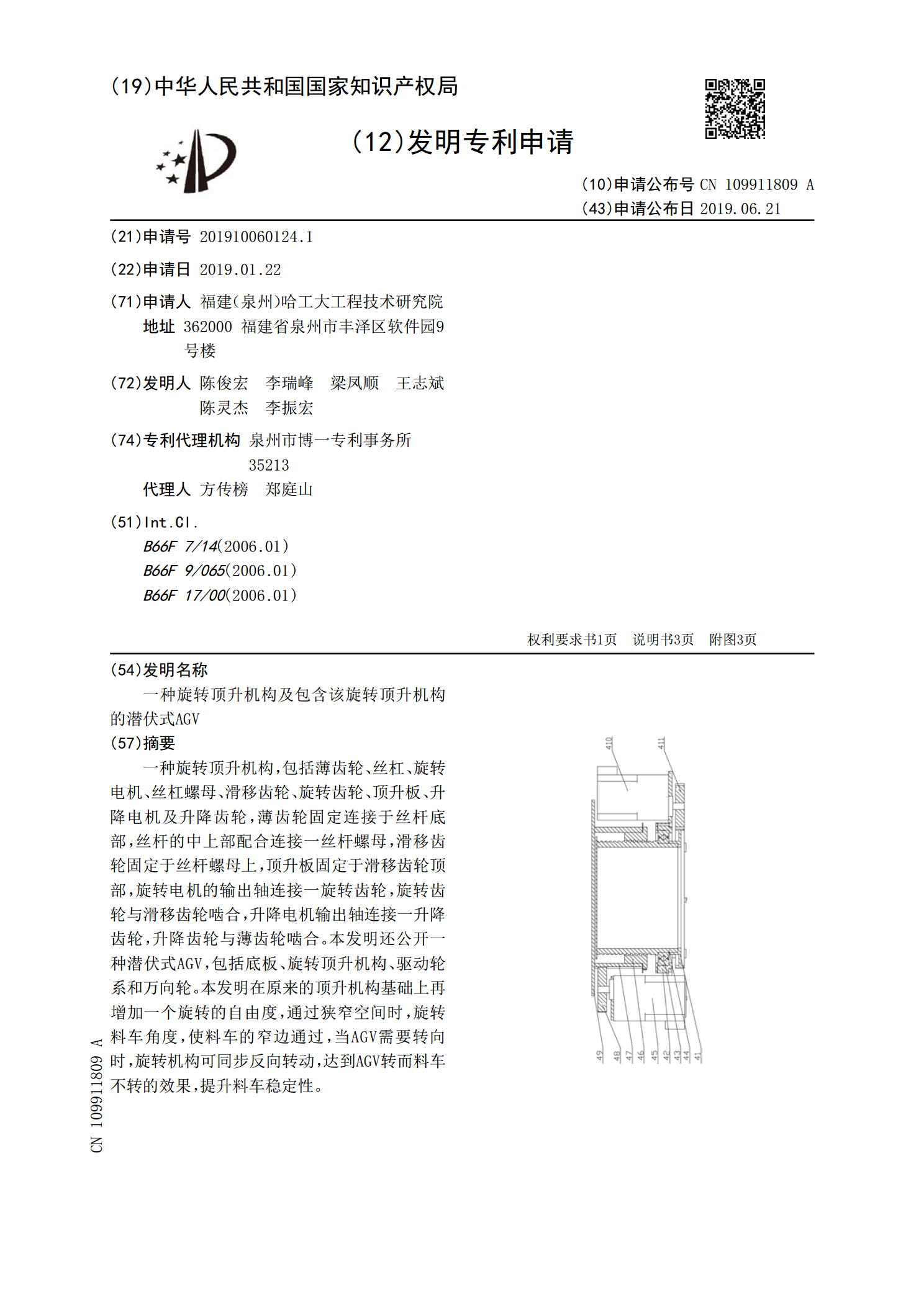
一种旋转顶升机构,包括薄齿轮、丝杠、旋转电机、丝杠螺母、滑移齿轮、旋转齿轮、顶升板、升降电机及升降齿轮,薄齿轮固定连接于丝杆底部,丝杆的中上部配合连接一丝杆螺母,滑移齿轮固定于丝杆螺母上,顶升板固定于滑移齿轮顶部,旋转电机的输出轴连接一旋转齿轮,旋转齿轮与滑移齿轮啮合,升降电机输出轴连接一升降齿轮,升降齿轮与薄齿轮啮合。本发明还公开一种潜伏式AGV,包括底板、旋转顶升机构、驱动轮系和万向轮。本发明在原来的顶升机构基础上再增加一个旋转的自由度,通过狭窄空间时,旋转料车角度,使料车的窄边通过,当AGV需要转向

一种回转支承、旋转顶升机构以及AGV小车.pdf
本发明公开了一种回转支承以及设置有该回转支承的旋转顶升结构和AGV小车,具体的,回转支承内齿圈和外齿圈均能够相对中间支承圈独立转动,并分别与对应结构组件进行啮合连接或啮合传动,进而形成便于使用的三层组装结构,而设置有上述回转支承旋的转顶升机构则能够通过转动第二电机而控制整个回转支承和工作平台的升降动作,通过转动第一电机即可实现工作平台的转动控制,整个机构的结构简单且操作方便,同时,配备设置有上述回转支承的旋转顶升机构的AGV小车不仅能够便于对工作平台进行旋转和升降控制,还能够大大简化整个小车的组成结构,在
一种AGV小车的顶升机构及AGV小车.pdf
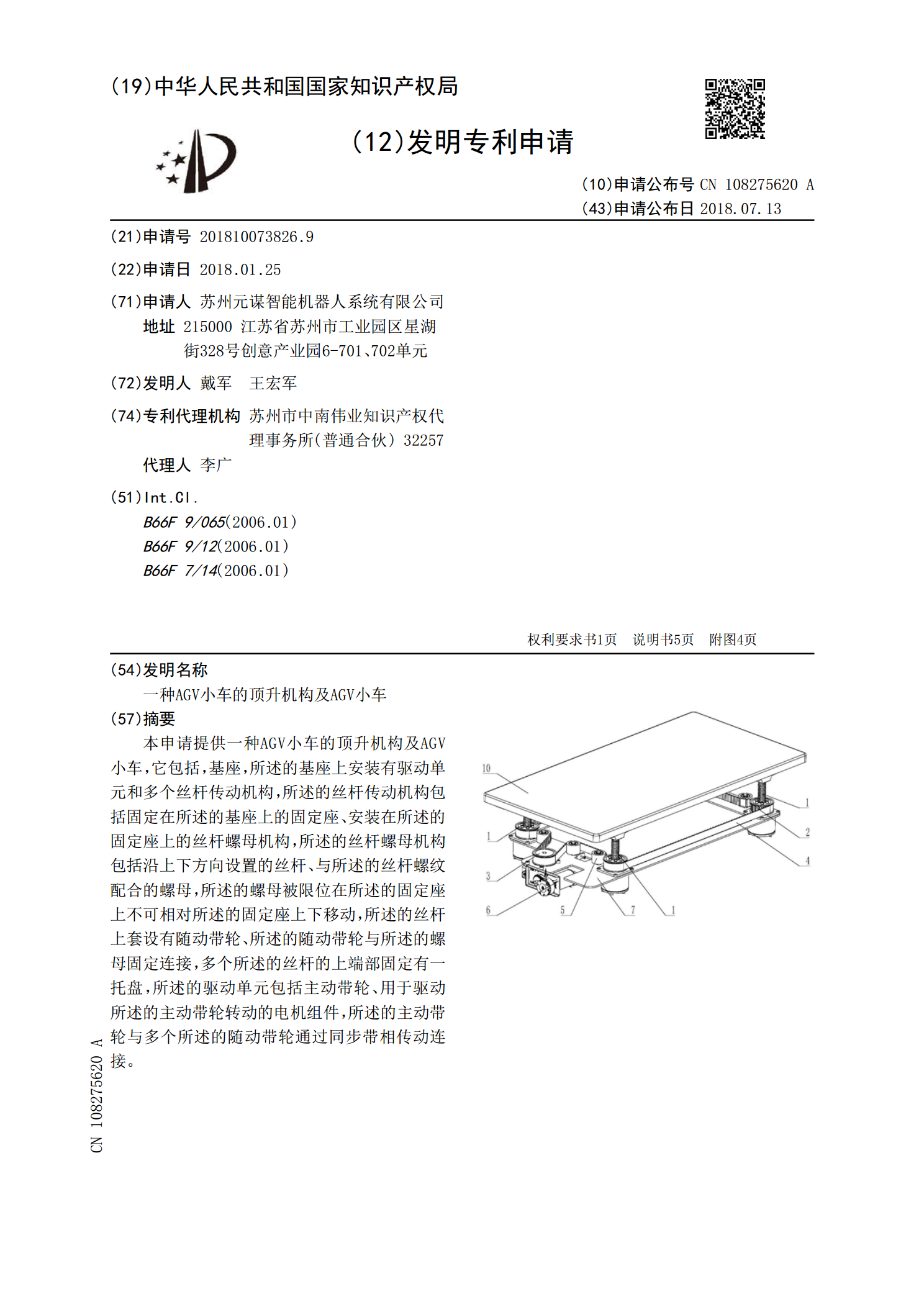
本申请提供一种AGV小车的顶升机构及AGV小车,它包括,基座,所述的基座上安装有驱动单元和多个丝杆传动机构,所述的丝杆传动机构包括固定在所述的基座上的固定座、安装在所述的固定座上的丝杆螺母机构,所述的丝杆螺母机构包括沿上下方向设置的丝杆、与所述的丝杆螺纹配合的螺母,所述的螺母被限位在所述的固定座上不可相对所述的固定座上下移动,所述的丝杆上套设有随动带轮、所述的随动带轮与所述的螺母固定连接,多个所述的丝杆的上端部固定有一托盘,所述的驱动单元包括主动带轮、用于驱动所述的主动带轮转动的电机组件,所述的主动带轮与

剪刀叉式顶升机构及AGV小车.pdf
本发明公开了一种剪刀叉式顶升机构及AGV小车,剪刀叉式顶升机构包括底盘、回转机构和剪刀叉升降机构;剪刀叉升降机构安装在底盘上,剪刀叉升降机构的上方装有回转机构;剪刀叉升降机构包括顶升板、两组剪刀叉机构和丝杠升降机;两组剪刀叉机构平行安装在底盘上,且剪刀叉机构的运动平面垂直于底盘;丝杠升降机的丝杠顶端切有两个限位平面,顶升板上开有与限位平面匹配的限位孔;回转机构包括旋转减速机、旋转小齿轮和回转支承;回转支承具有外齿结构;旋转减速机输出轴穿过顶升板上的开孔与旋转小齿轮相连,旋转小齿轮与回转支承的外齿啮合实现旋