
一种混合推进式自适应管道清淤机器人及方法.pdf

雨巷****轶丽

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种混合推进式自适应管道清淤机器人及方法.pdf
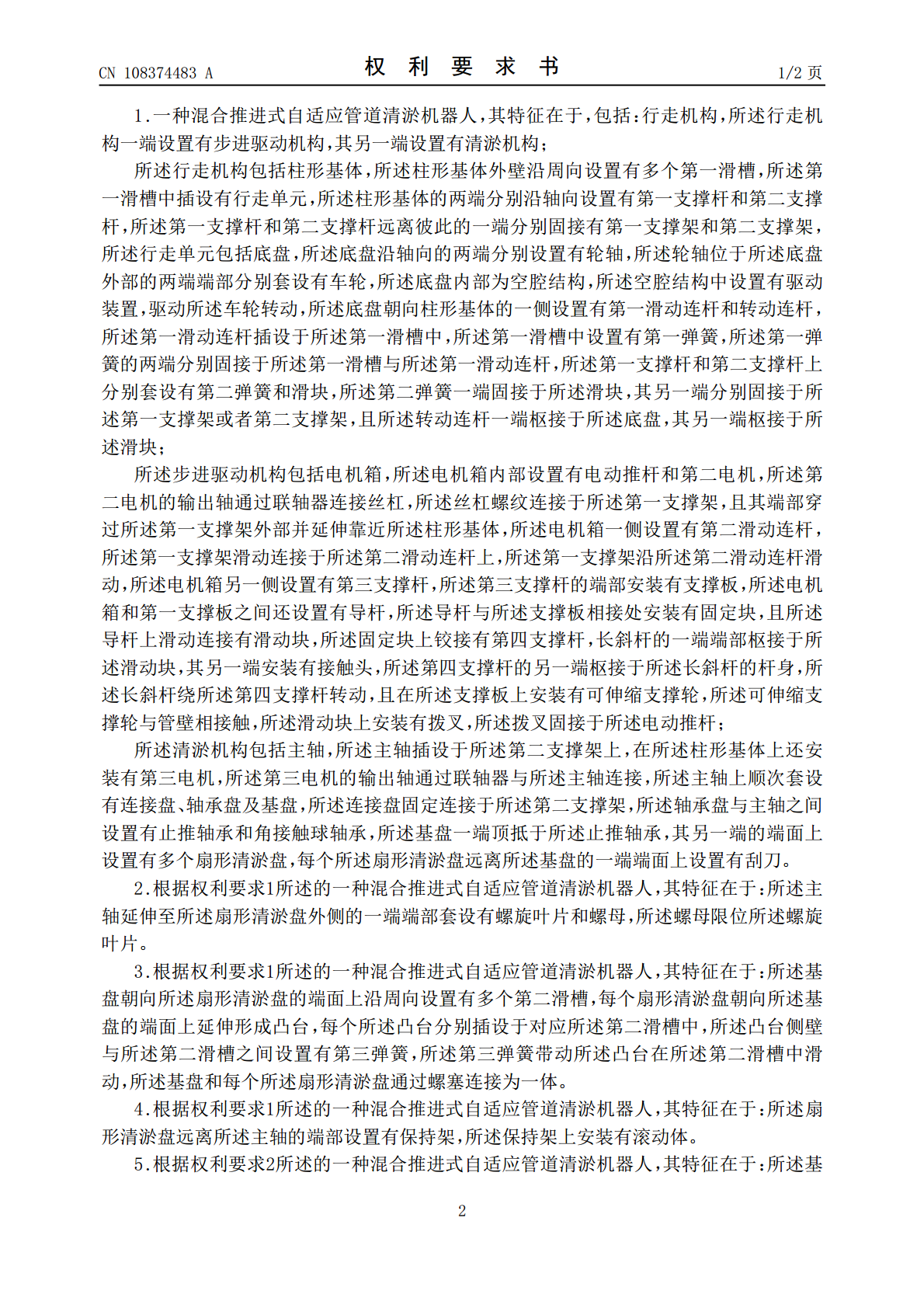
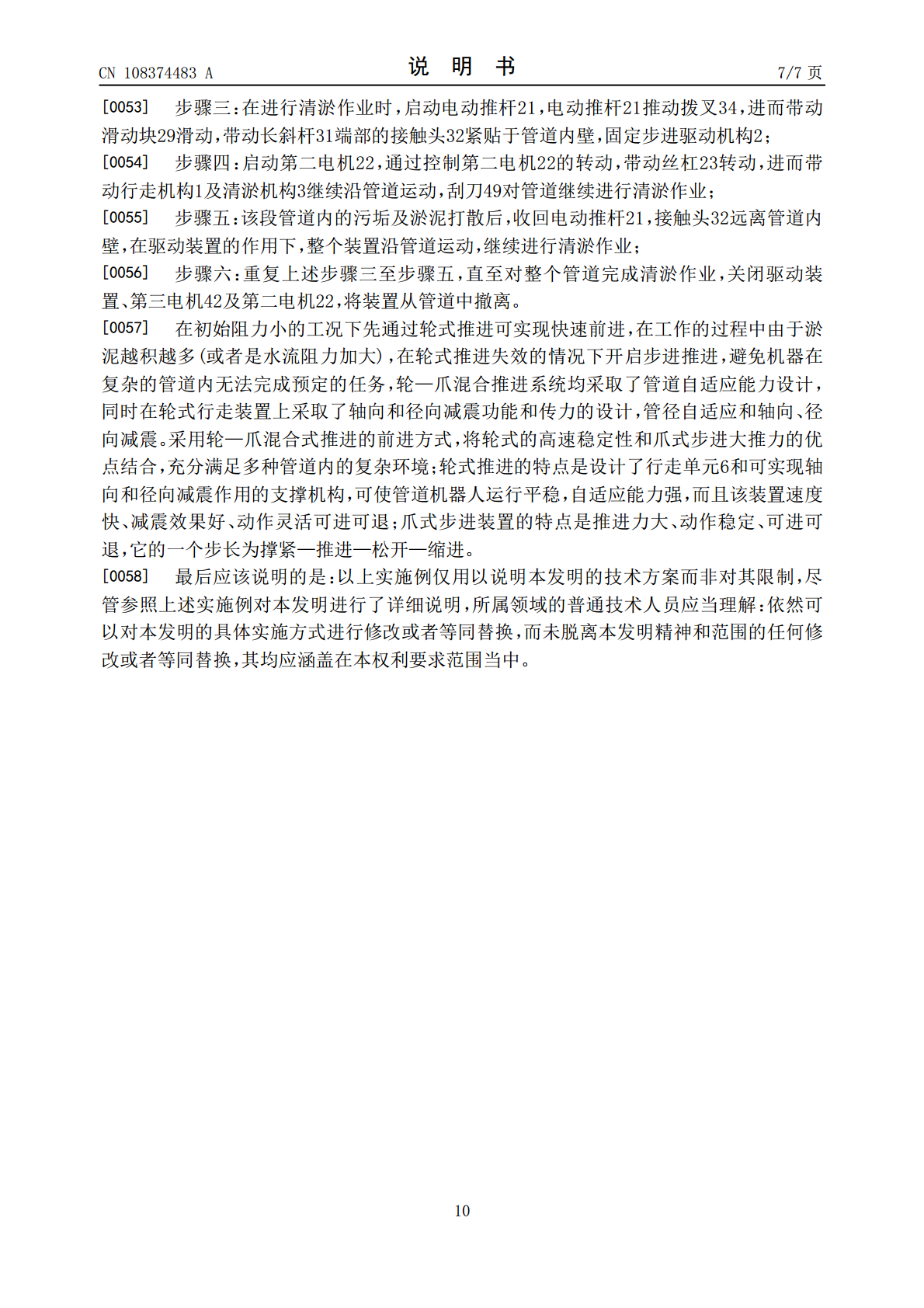
本发明一种混合推进式自适应管道清淤机器人及方法,包括:行走机构,所述行走机构一端设置有步进驱动机构,其另一端设置有清淤机构,清淤机构可旋转作业,同时行走机构和步进驱动机构带动机器人前进运动,使机器人整体可实现轴向和周向的螺旋清淤动作,可以完成复杂工况的清淤任务。适用于城镇下水管道和工业用大型管道的清淤工作,对老旧管道的清淤疏通。可携带安装各种管道清淤装置、探测装置和修复装置等,对城市管道的正常维护和对城市的现代化建设具有非凡的意义,清淤机构采取刮削‑搅拌‑过滤‑推进‑冲刷五位一体的多功能的清淤作业方式,清
一种自适应管道清淤机器人.pdf
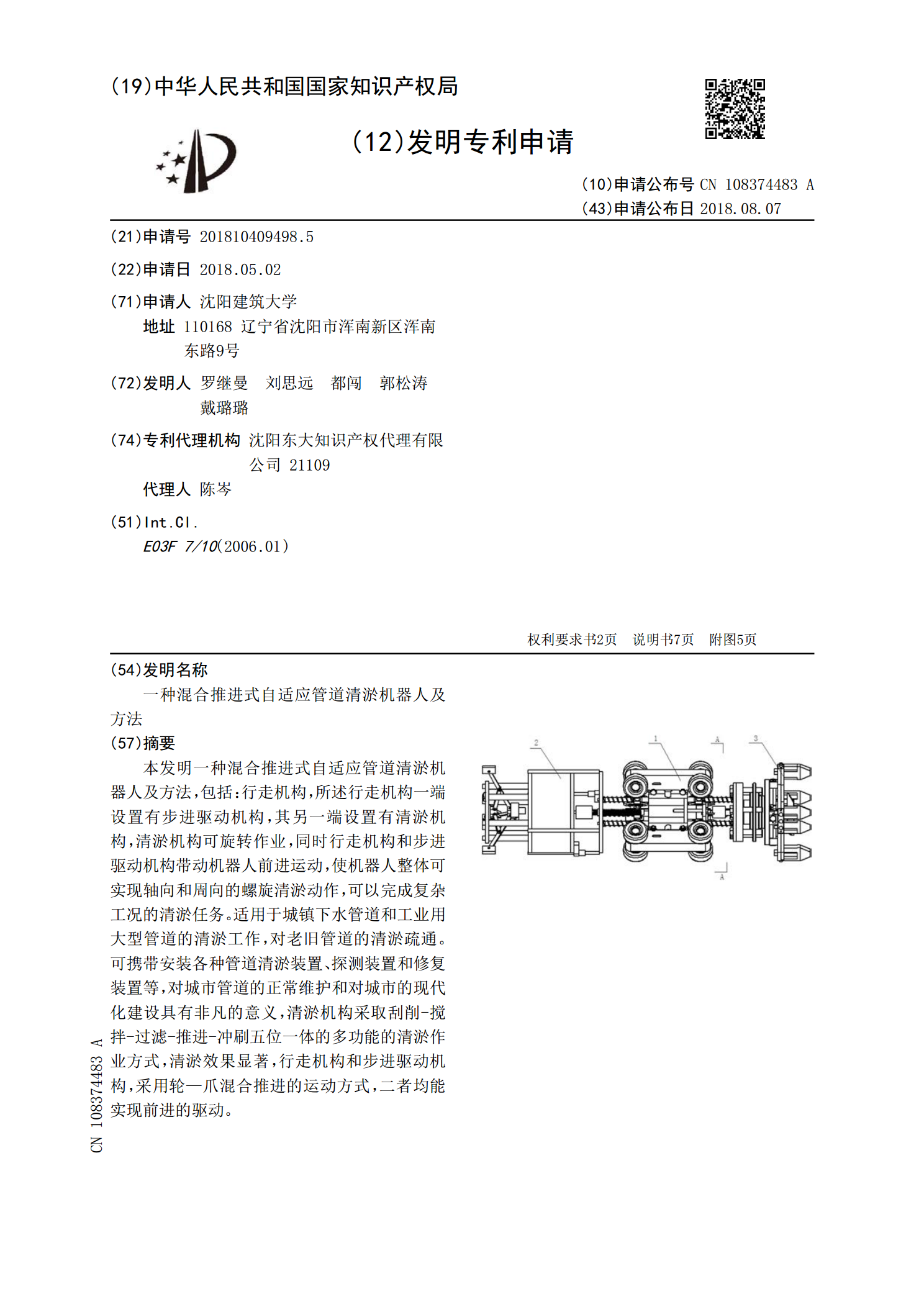
本发明涉及一种自适应管道清淤机器人,包括壳体、铰刀清淤机构、摄像头和多个行走装置,铰刀清淤机构设置在壳体上,摄像头设置在壳体上,行走装置包括变径机构、行走机构和感压模块,变径机构设置在壳体上,行走机构设置在变径机构的输出端,感压模块与升降式变径机构相匹配。本发明的有益效果是:在将机器人下放到管道内后,可以实时采集管道内部图像,从而便于工作人员了解机器人所处环境,便于及时调整机器人;通过利用感压模块来监测数据,便于了解机器人的受力情况及工作状态,方便实时调整变径机构,以使机器人适应不同的管径,使机器人始终稳
一种管道自适应清淤机器人.pdf
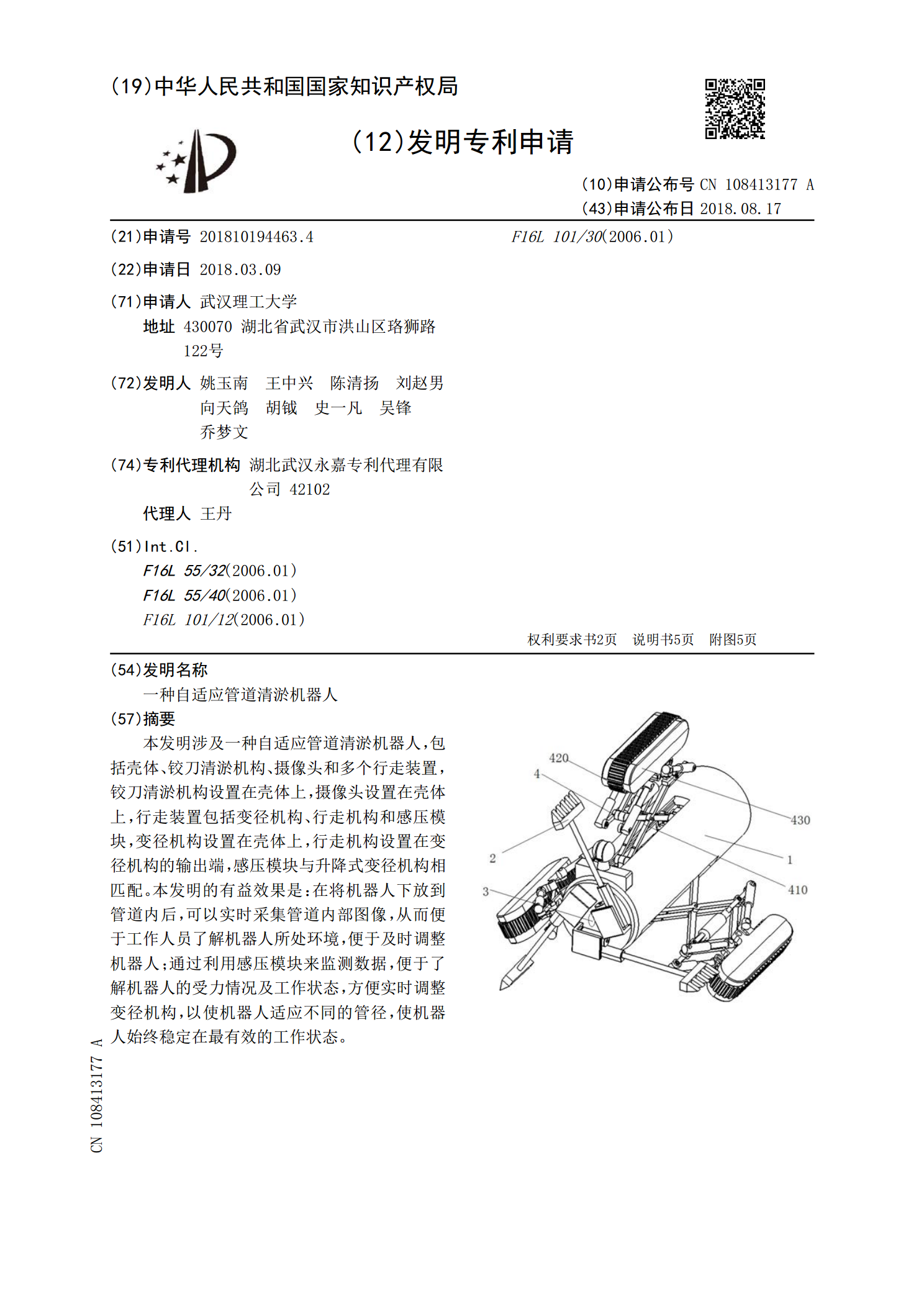
本发明公开了一种管道自适应清淤机器人,包括机器人主体、带动机器人主体在管道内行进的履带轮机构和与所述机器人主体连接且沿行进方向位于机器人主体前方的刀盘,所述机器人主体内设有刀盘驱动电机;所述刀盘包括:转轴,与所述刀盘电机的输出轴连接,转轴的轴线与管道的轴向相平行;刀具,以转轴为中心呈发散分布;弹簧,连接转轴与对应的刀具;万向轮,设于每个刀具自由端的端头处,与管道内壁接触。本发明适用于不同管径的清淤工作。
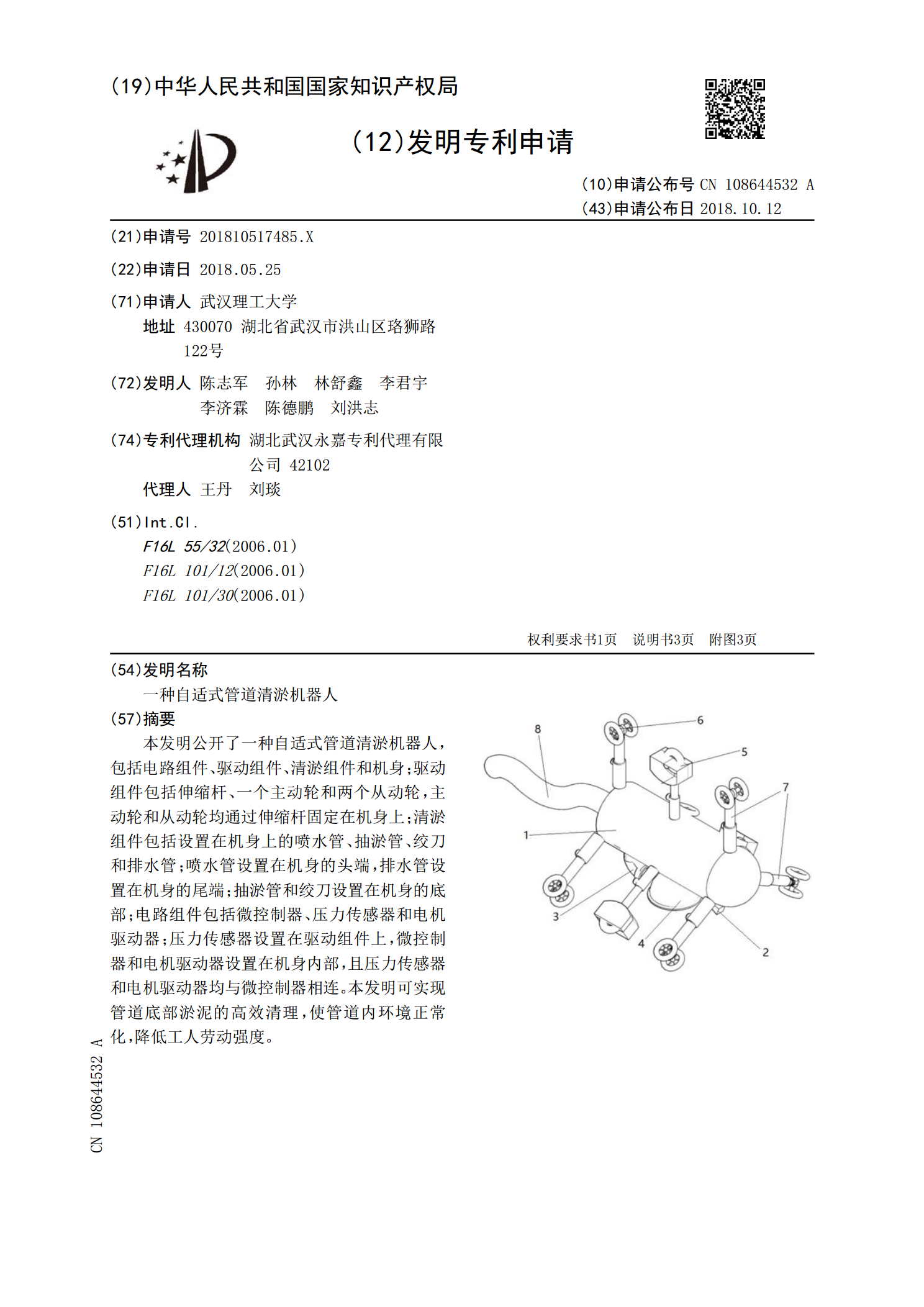
一种自适式管道清淤机器人.pdf
本发明公开了一种自适式管道清淤机器人,包括电路组件、驱动组件、清淤组件和机身;驱动组件包括伸缩杆、一个主动轮和两个从动轮,主动轮和从动轮均通过伸缩杆固定在机身上;清淤组件包括设置在机身上的喷水管、抽淤管、绞刀和排水管;喷水管设置在机身的头端,排水管设置在机身的尾端;抽淤管和绞刀设置在机身的底部;电路组件包括微控制器、压力传感器和电机驱动器;压力传感器设置在驱动组件上,微控制器和电机驱动器设置在机身内部,且压力传感器和电机驱动器均与微控制器相连。本发明可实现管道底部淤泥的高效清理,使管道内环境正常化,降低工
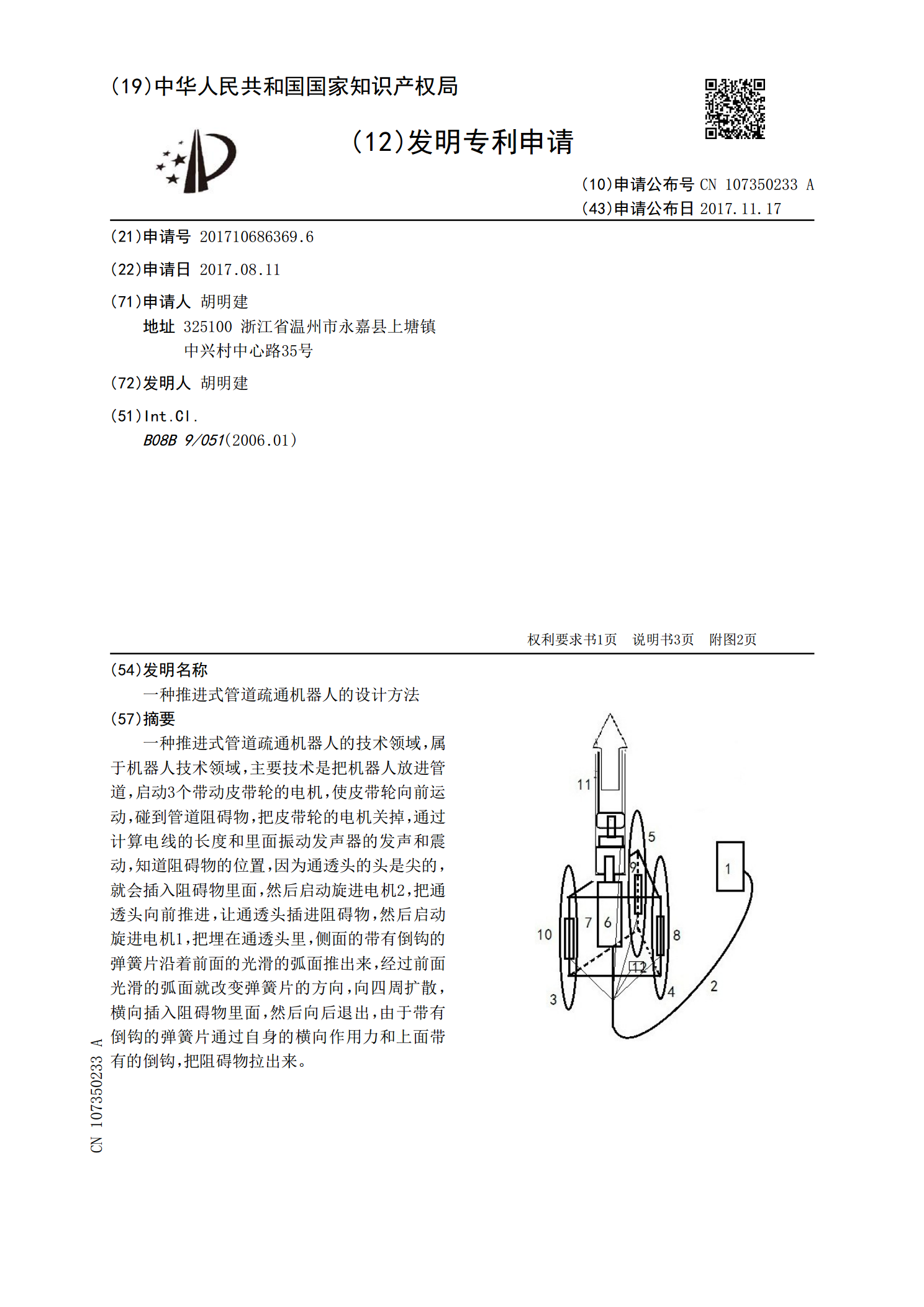
一种推进式管道疏通机器人的设计方法.pdf
一种推进式管道疏通机器人的技术领域,属于机器人技术领域,主要技术是把机器人放进管道,启动3个带动皮带轮的电机,使皮带轮向前运动,碰到管道阻碍物,把皮带轮的电机关掉,通过计算电线的长度和里面振动发声器的发声和震动,知道阻碍物的位置,因为通透头的头是尖的,就会插入阻碍物里面,然后启动旋进电机2,把通透头向前推进,让通透头插进阻碍物,然后启动旋进电机1,把埋在通透头里,侧面的带有倒钩的弹簧片沿着前面的光滑的弧面推出来,经过前面光滑的弧面就改变弹簧片的方向,向四周扩散,横向插入阻碍物里面,然后向后退出,由于带有倒