
一种用于搬运的机器人.pdf

秀华****魔王


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于搬运的机器人.pdf
本发明公开了一种用于搬运的机器人,箱体内腔底部四个端脚部位均通过螺钉固定有步进电机,步进电机的转子上套有全向轮,箱体内腔中部设置有锂电池组,锂电池组的上方设置有中央控制装置,箱体内腔右侧设置有上提装置,上提装置的上方设置有上提电机,上提装置的传送带上设置有锁紧装置,锁紧装置的水平端通过螺栓固定有抓紧电机,抓紧电机的转子上套有夹具,箱体右侧壁下方通过螺栓固定有电动升降机,电动升降机的上方设置有托盘,托盘中部镶嵌有距离传感器。本发明的有益效果是:该用于搬运的机器人在搬运物体时具有可以防止物品从侧手臂中间脱离、

一种用于搬运机器人的装置.pdf
本发明公开了一种用于搬运机器人的装置,包括底座,底座底部的四角均设置有支架,支架的底部活动连接有滚轮,所述支架的顶部贯穿至底座的内腔并固定连接有伸缩装置,所述伸缩装置的表面套设有第一弹簧,所述伸缩装置的顶部与底座内腔的顶部固定连接,所述底座内腔顶部的四角均设置有滑杆,所述滑杆的两侧均固定连接有连接块。本发明通过设置底座、滚轮、支架、承载板、扶手、第一固定块、通孔、第二固定块、伸缩装置、固定壳、限位板、伸缩杆、第一弹簧、连接杆、滑套、滑杆、第二弹簧和连接块的配合使用,解决了现有的部分用于搬运机器人的装置减震

一种用于大型仓储物流搬运的机器人及搬运方法.pdf
本发明公开了一种用于大型仓储物流搬运的机器人及搬运方法,包括车体,所述车体两侧的底部均设置有防护板,所述防护板靠近车体一侧的前后两侧均固定连接有连接柱。本发明通过设置车体、承载壳、连接柱、轴承套、放置壳、放置板、电动伸缩杆、定位板、皮带、主动轮、控制台、第二电机、壳体、活动壳、第一电机、固定板、连接杆、螺纹板、滑套、滑杆、正向螺纹杆、固定块、反向螺纹杆、旋转杆、从动轮和螺纹丝杆的配合使用,解决了现有的用于大型仓储物流搬运的机器人不能增大使用面积且部分搬运机器人不能调节高度的问题,该用于大型仓储物流搬运的机
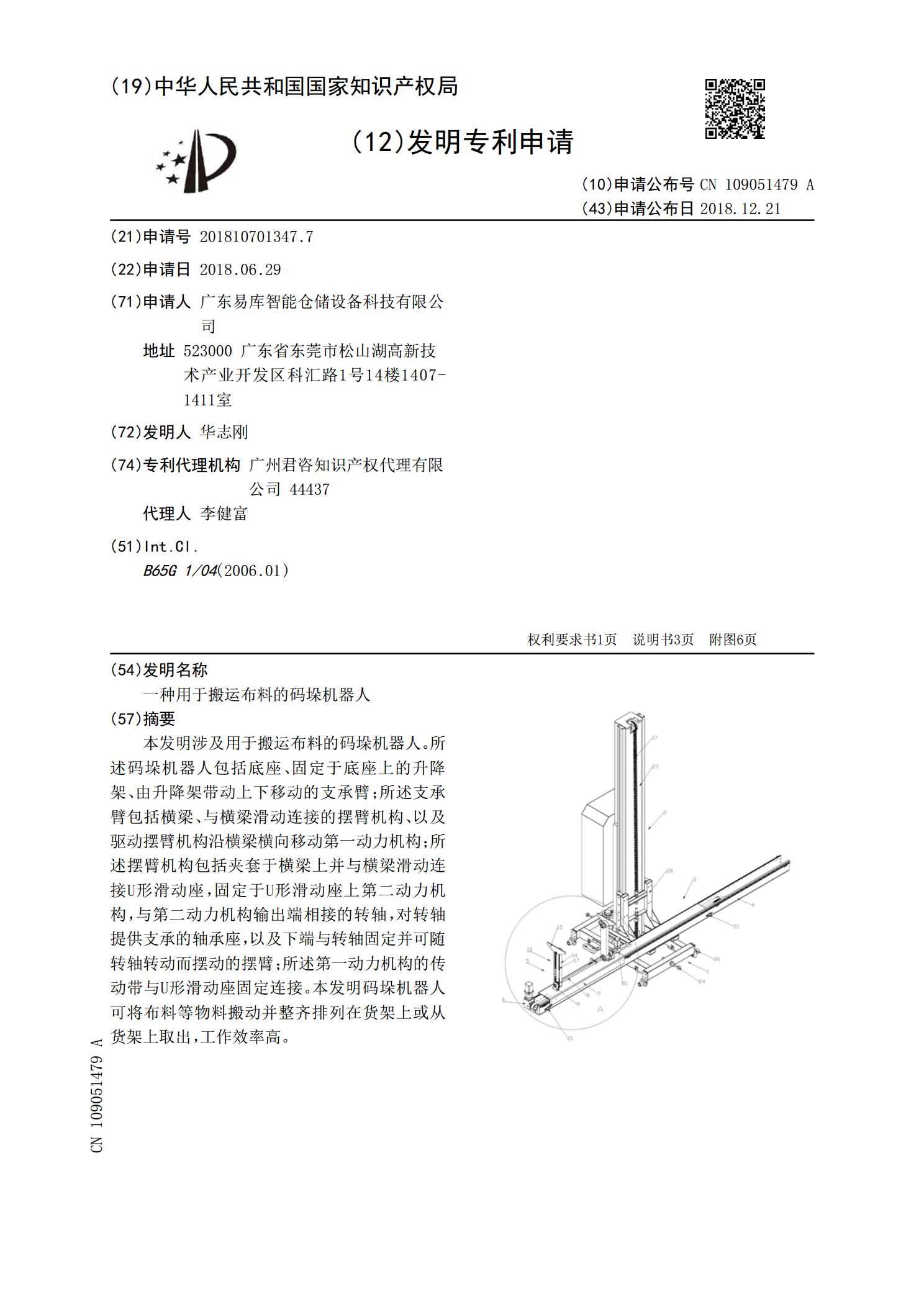
一种用于搬运布料的码垛机器人.pdf
本发明涉及用于搬运布料的码垛机器人。所述码垛机器人包括底座、固定于底座上的升降架、由升降架带动上下移动的支承臂;所述支承臂包括横梁、与横梁滑动连接的摆臂机构、以及驱动摆臂机构沿横梁横向移动第一动力机构;所述摆臂机构包括夹套于横梁上并与横梁滑动连接U形滑动座,固定于U形滑动座上第二动力机构,与第二动力机构输出端相接的转轴,对转轴提供支承的轴承座,以及下端与转轴固定并可随转轴转动而摆动的摆臂;所述第一动力机构的传动带与U形滑动座固定连接。本发明码垛机器人可将布料等物料搬动并整齐排列在货架上或从货架上取出,工作

用于搬运机器人的搬运定位结构.pdf
本发明涉及用于搬运机器人的搬运定位结构,涉及搬运机器人技术领域,由位移传动架、滑动支撑架、传动机械臂、和吸附结构组成,由一端向另一端延伸预定距离、用以作为搬运位移轨道的位移传动架;与所述位移传动架滑动连接、用以带动组件往复运动的滑动支撑架;与所述滑动支撑架转动连接、用以调节夹持方位的传动机械臂;以及与所述传动机械臂的输出端转动连接、用以进行工件夹持定位的工件定位结构,解决搬运机器人在搬运过程中定位不稳定和搬运机器人进行工件定位时不能根据工件的外形以及强度需求进行夹持定位调节的问题。