
一种巡检机器人的底盘及底盘的控制方法.pdf

纪阳****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种巡检机器人的底盘及底盘的控制方法.pdf
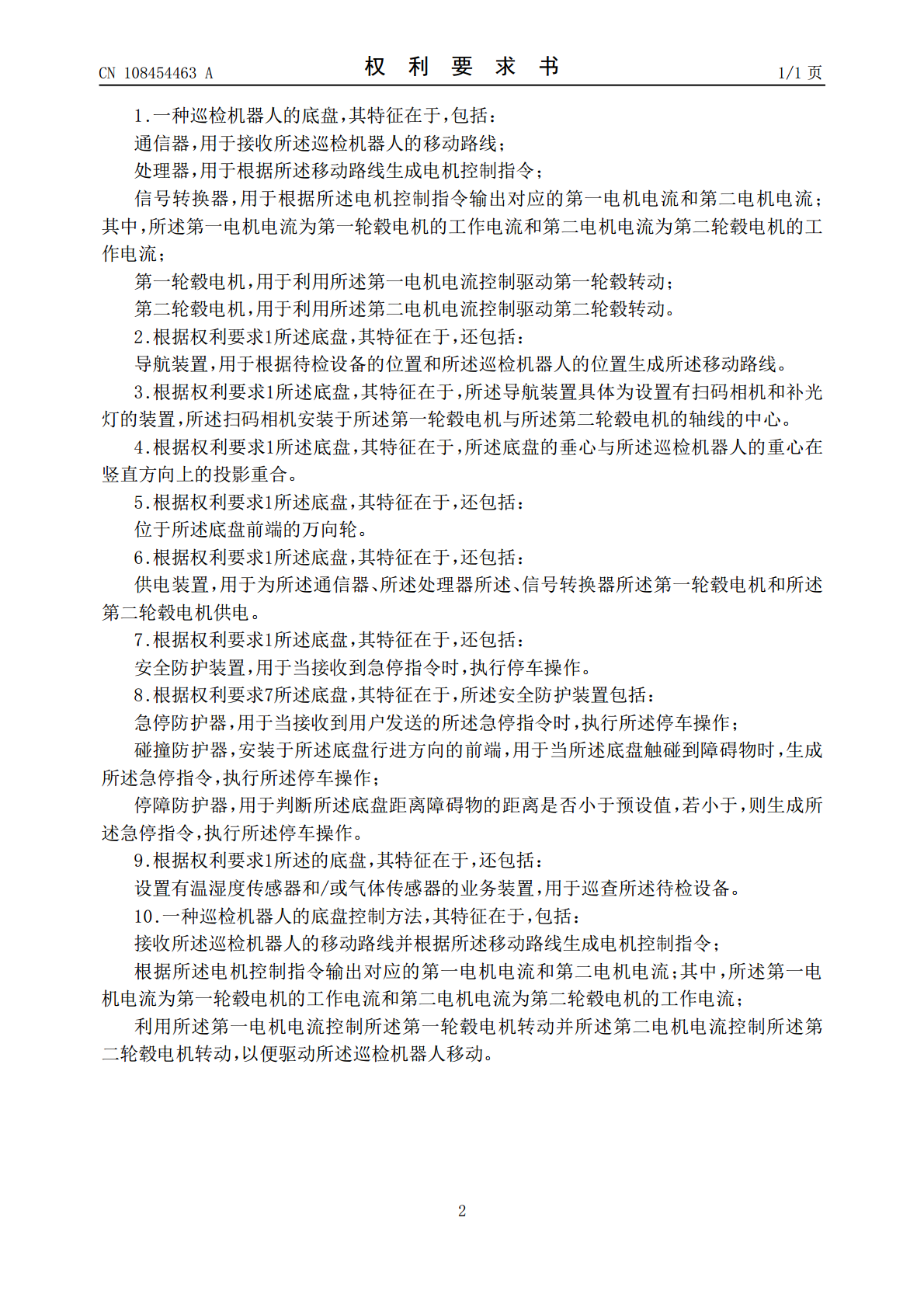
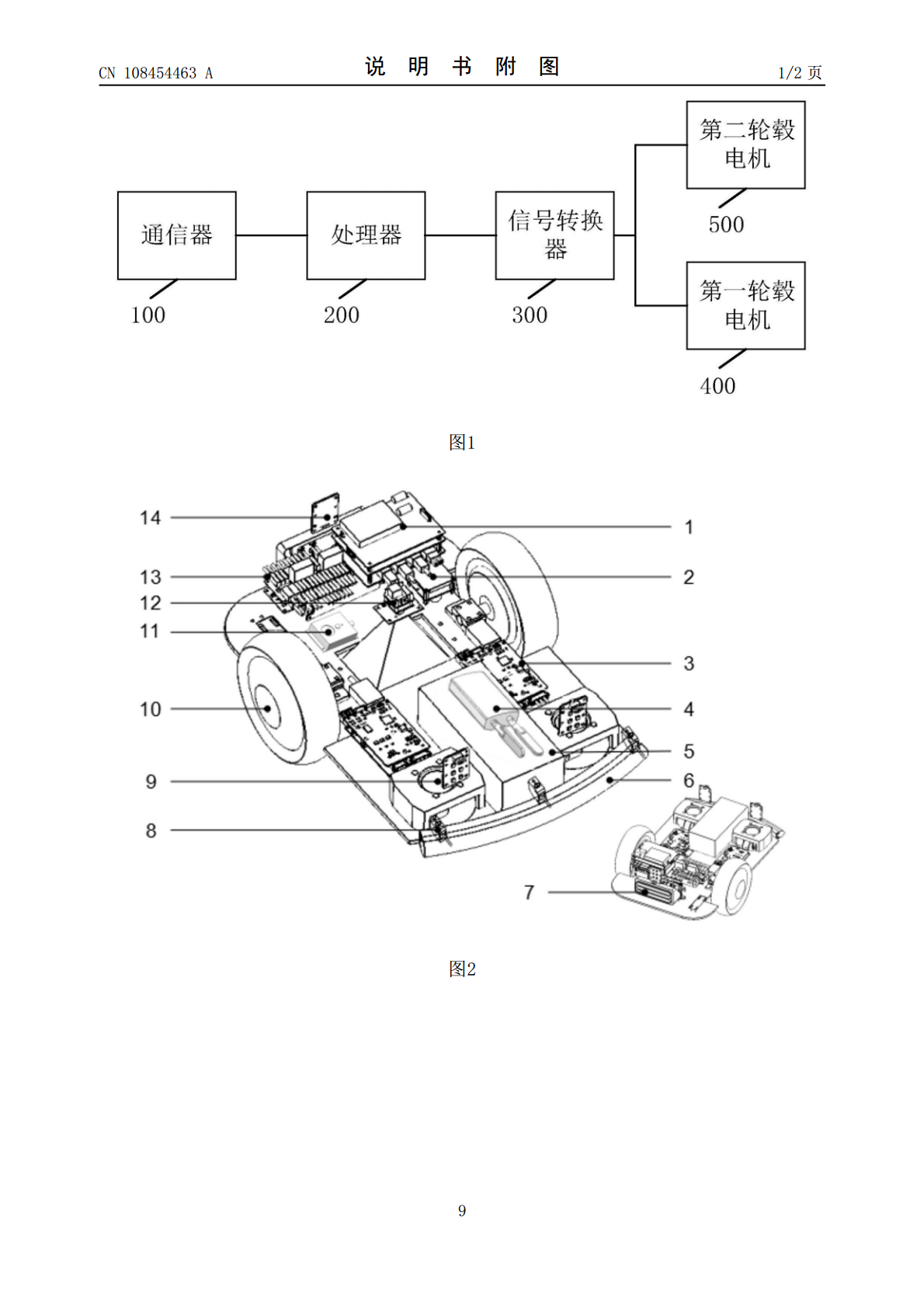
本申请公开了一种巡检机器人的底盘,所述底盘包括:通信器,用于接收所述巡检机器人的移动路线;处理器,用于根据所述移动路线生成电机控制指令;信号转换器,用于根据所述电机控制指令输出对应的第一电机电流和第二电机电流;其中,所述第一电机电流为第一轮毂电机的工作电流和第二电机电流为第二轮毂电机的工作电流;第一轮毂电机,用于利用所述第一电机电流控制驱动第一轮毂转动;第二轮毂电机,用于利用所述第二电机电流控制驱动第二轮毂转动。本申请能够提高巡检机器人的灵活性、降低作业空间需求。本申请还公开了一种巡检机器人的底盘的控制方
一种轮式巡检机器人底盘.pdf
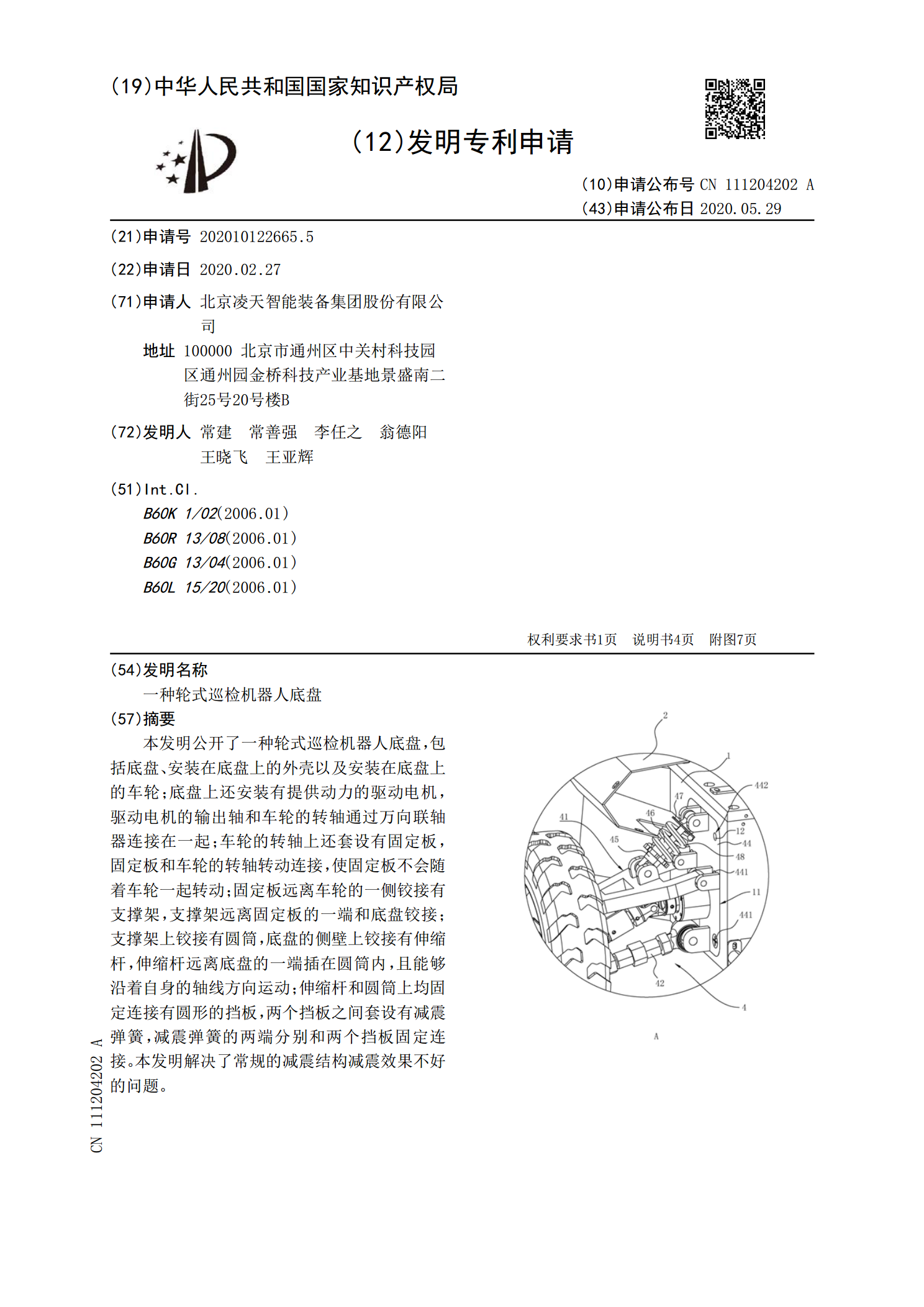
本发明公开了一种轮式巡检机器人底盘,包括底盘、安装在底盘上的外壳以及安装在底盘上的车轮;底盘上还安装有提供动力的驱动电机,驱动电机的输出轴和车轮的转轴通过万向联轴器连接在一起;车轮的转轴上还套设有固定板,固定板和车轮的转轴转动连接,使固定板不会随着车轮一起转动;固定板远离车轮的一侧铰接有支撑架,支撑架远离固定板的一端和底盘铰接;支撑架上铰接有圆筒,底盘的侧壁上铰接有伸缩杆,伸缩杆远离底盘的一端插在圆筒内,且能够沿着自身的轴线方向运动;伸缩杆和圆筒上均固定连接有圆形的挡板,两个挡板之间套设有减震弹簧,减震弹
一种场地巡检机器人的移动底盘及移动方法.pdf
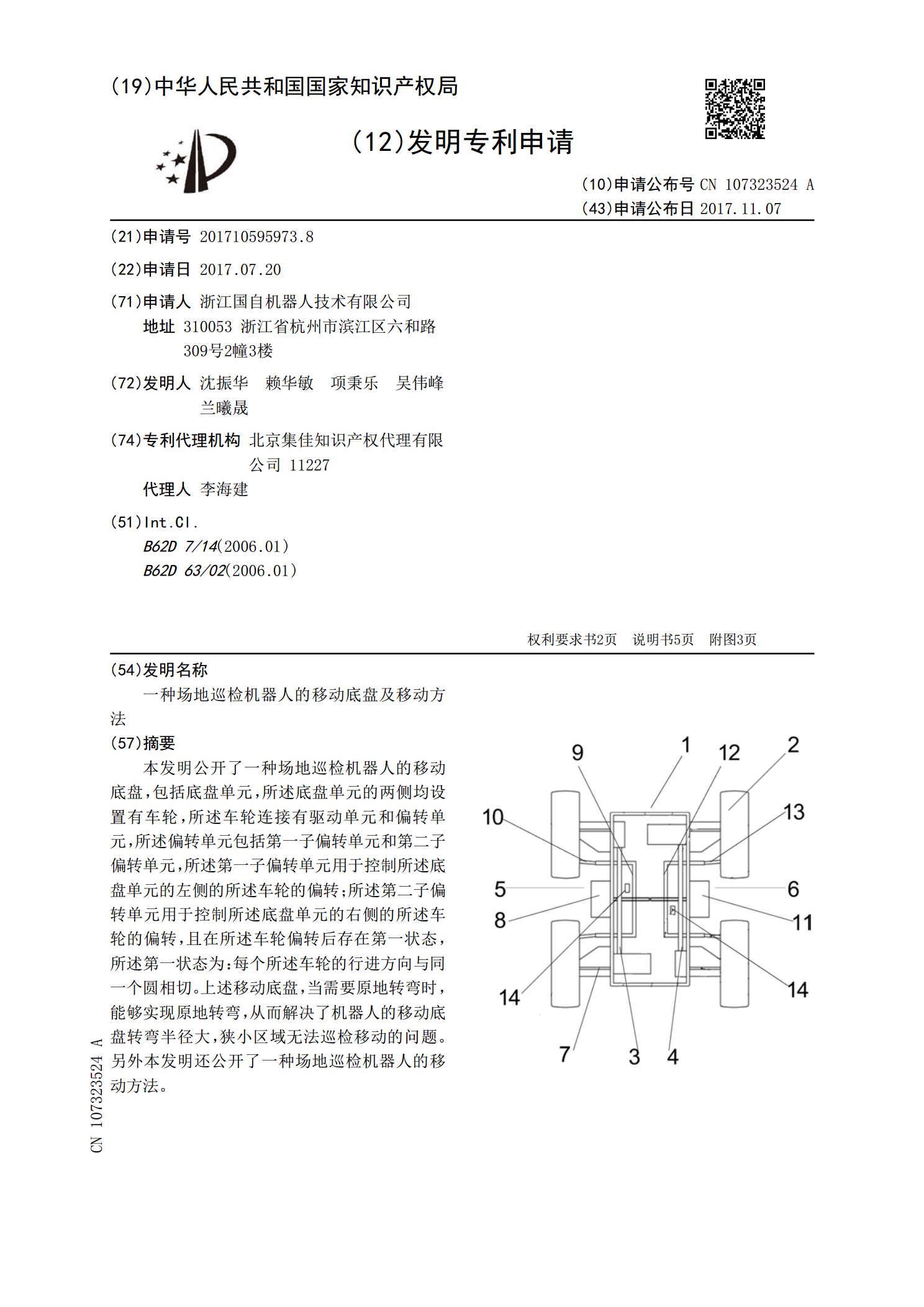
本发明公开了一种场地巡检机器人的移动底盘,包括底盘单元,所述底盘单元的两侧均设置有车轮,所述车轮连接有驱动单元和偏转单元,所述偏转单元包括第一子偏转单元和第二子偏转单元,所述第一子偏转单元用于控制所述底盘单元的左侧的所述车轮的偏转;所述第二子偏转单元用于控制所述底盘单元的右侧的所述车轮的偏转,且在所述车轮偏转后存在第一状态,所述第一状态为:每个所述车轮的行进方向与同一个圆相切。上述移动底盘,当需要原地转弯时,能够实现原地转弯,从而解决了机器人的移动底盘转弯半径大,狭小区域无法巡检移动的问题。另外本发明还公
一种场地巡检机器人的移动底盘及移动方法.pdf
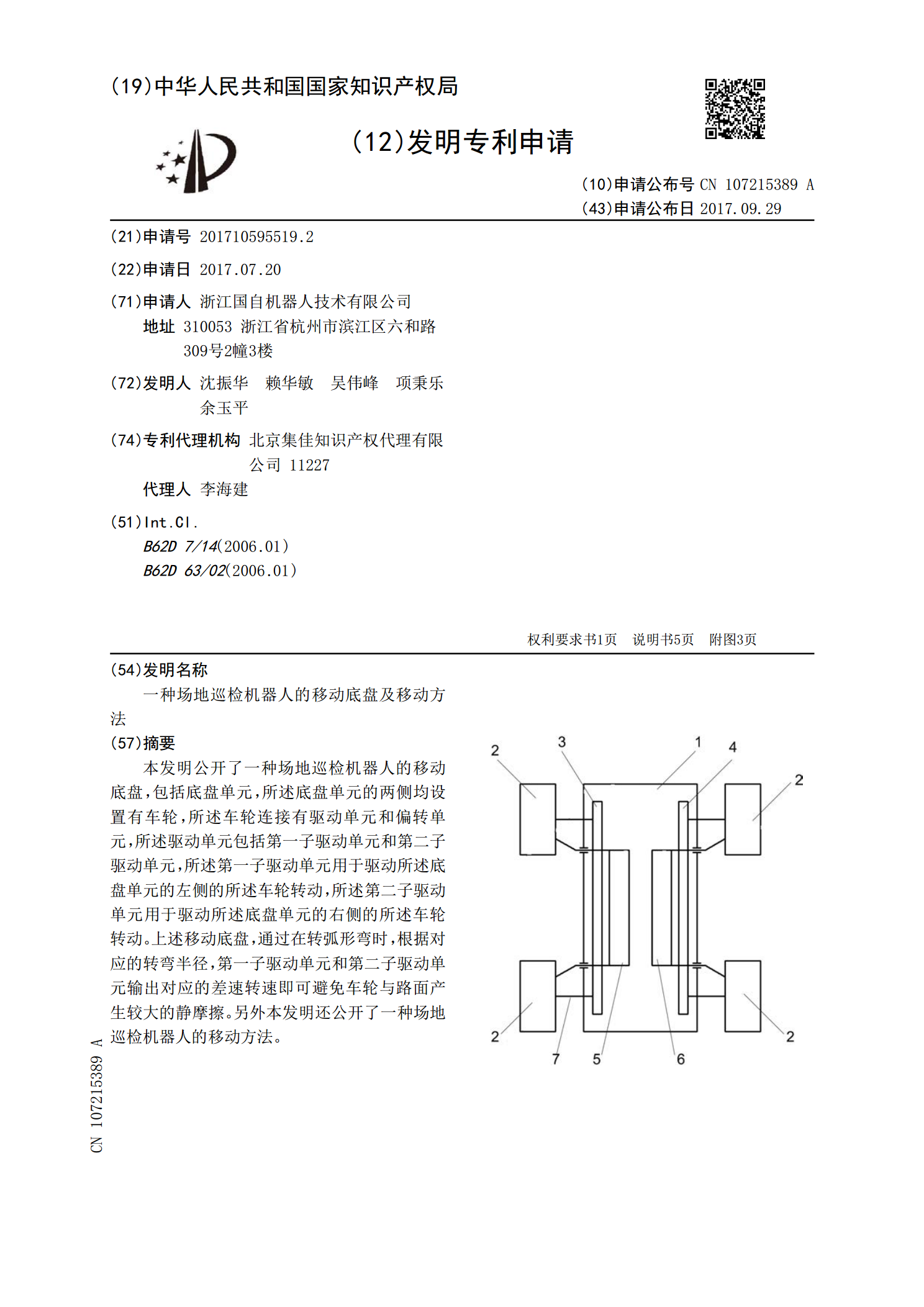
本发明公开了一种场地巡检机器人的移动底盘,包括底盘单元,所述底盘单元的两侧均设置有车轮,所述车轮连接有驱动单元和偏转单元,所述驱动单元包括第一子驱动单元和第二子驱动单元,所述第一子驱动单元用于驱动所述底盘单元的左侧的所述车轮转动,所述第二子驱动单元用于驱动所述底盘单元的右侧的所述车轮转动。上述移动底盘,通过在转弧形弯时,根据对应的转弯半径,第一子驱动单元和第二子驱动单元输出对应的差速转速即可避免车轮与路面产生较大的静摩擦。另外本发明还公开了一种场地巡检机器人的移动方法。
一种巡检机器人的底盘结构及巡检机器人.pdf
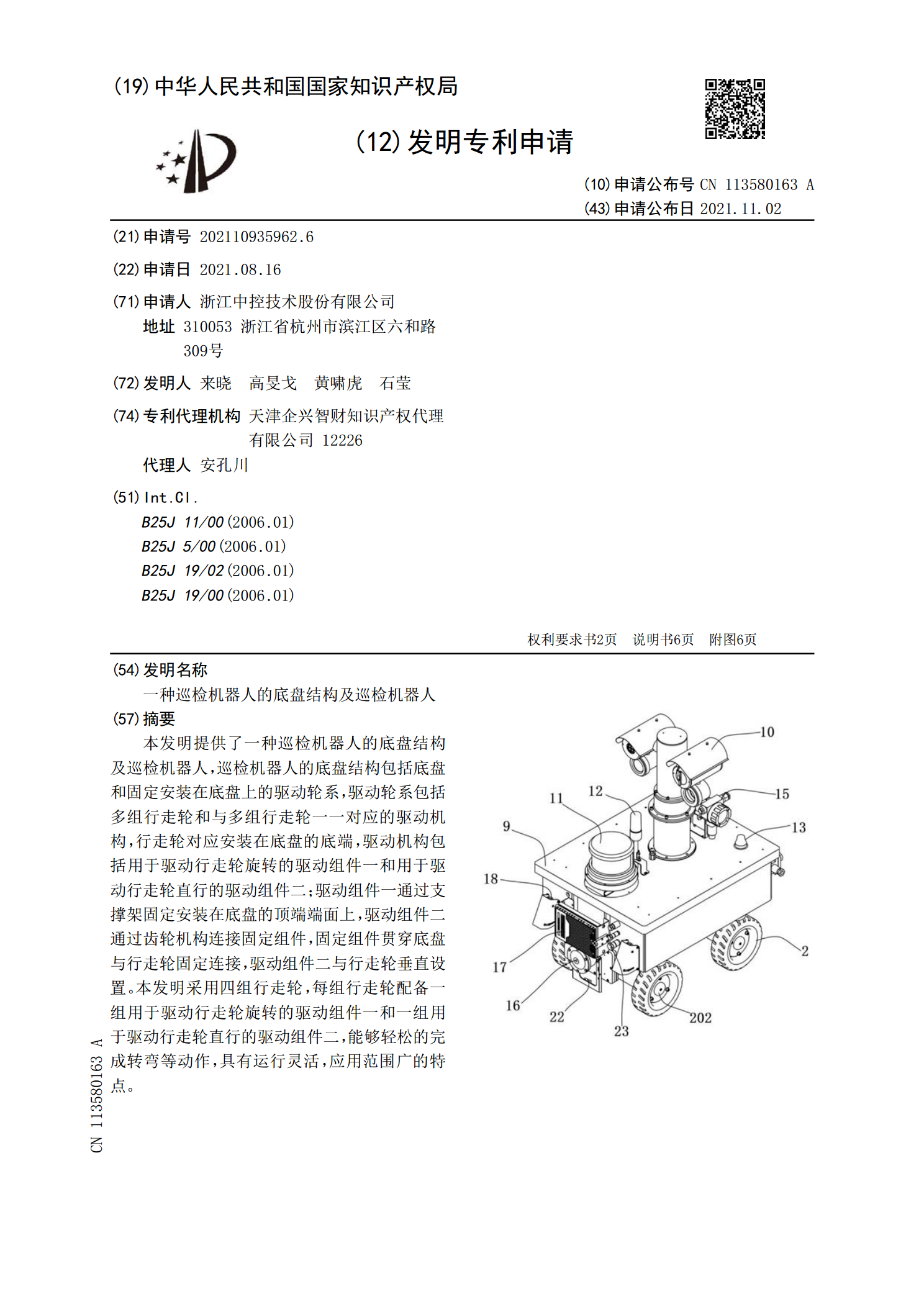
本发明提供了一种巡检机器人的底盘结构及巡检机器人,巡检机器人的底盘结构包括底盘和固定安装在底盘上的驱动轮系,驱动轮系包括多组行走轮和与多组行走轮一一对应的驱动机构,行走轮对应安装在底盘的底端,驱动机构包括用于驱动行走轮旋转的驱动组件一和用于驱动行走轮直行的驱动组件二;驱动组件一通过支撑架固定安装在底盘的顶端端面上,驱动组件二通过齿轮机构连接固定组件,固定组件贯穿底盘与行走轮固定连接,驱动组件二与行走轮垂直设置。本发明采用四组行走轮,每组行走轮配备一组用于驱动行走轮旋转的驱动组件一和一组用于驱动行走轮直行的