
一种场地巡检机器人的移动底盘及移动方法.pdf

春景****23

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种场地巡检机器人的移动底盘及移动方法.pdf
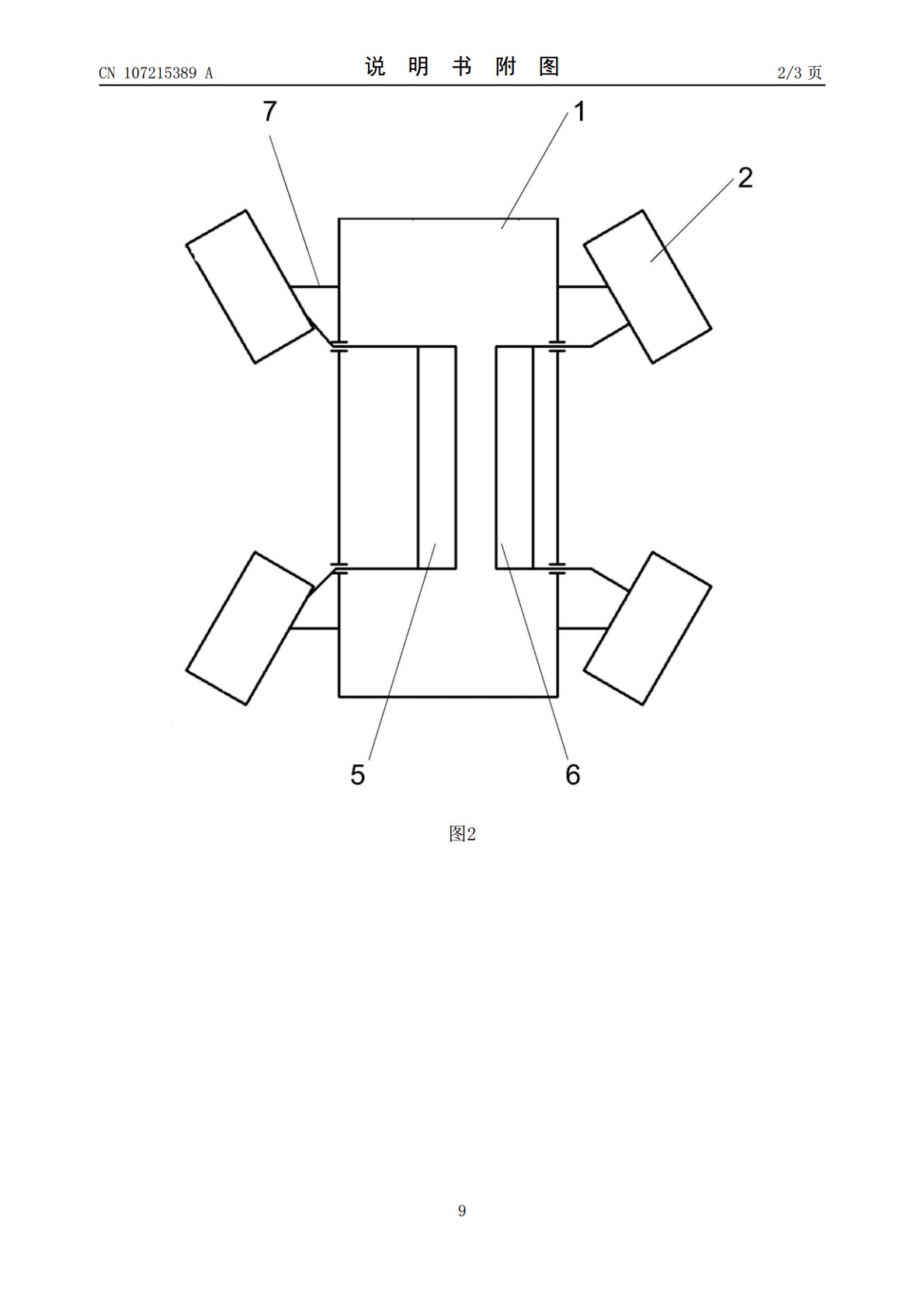
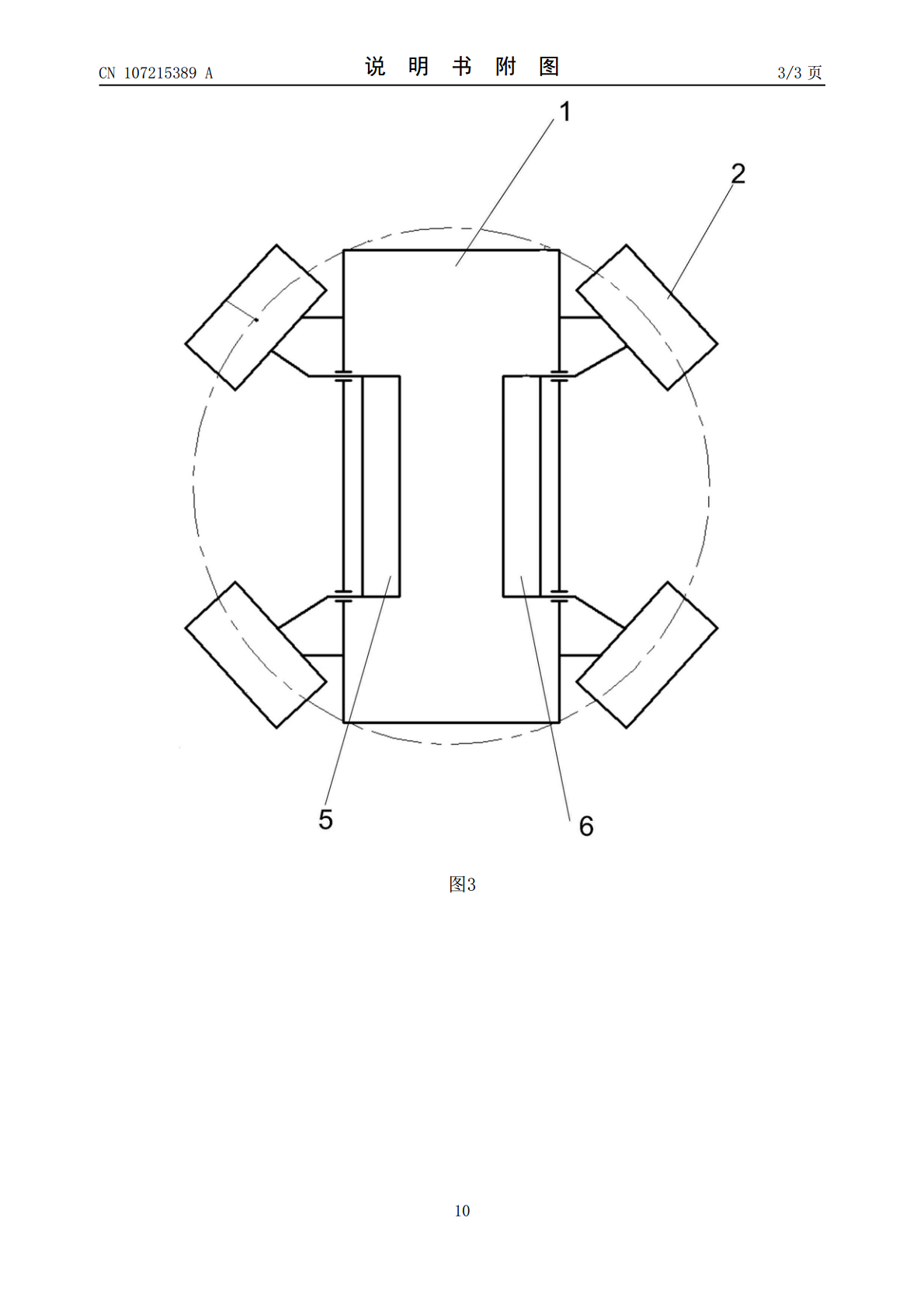
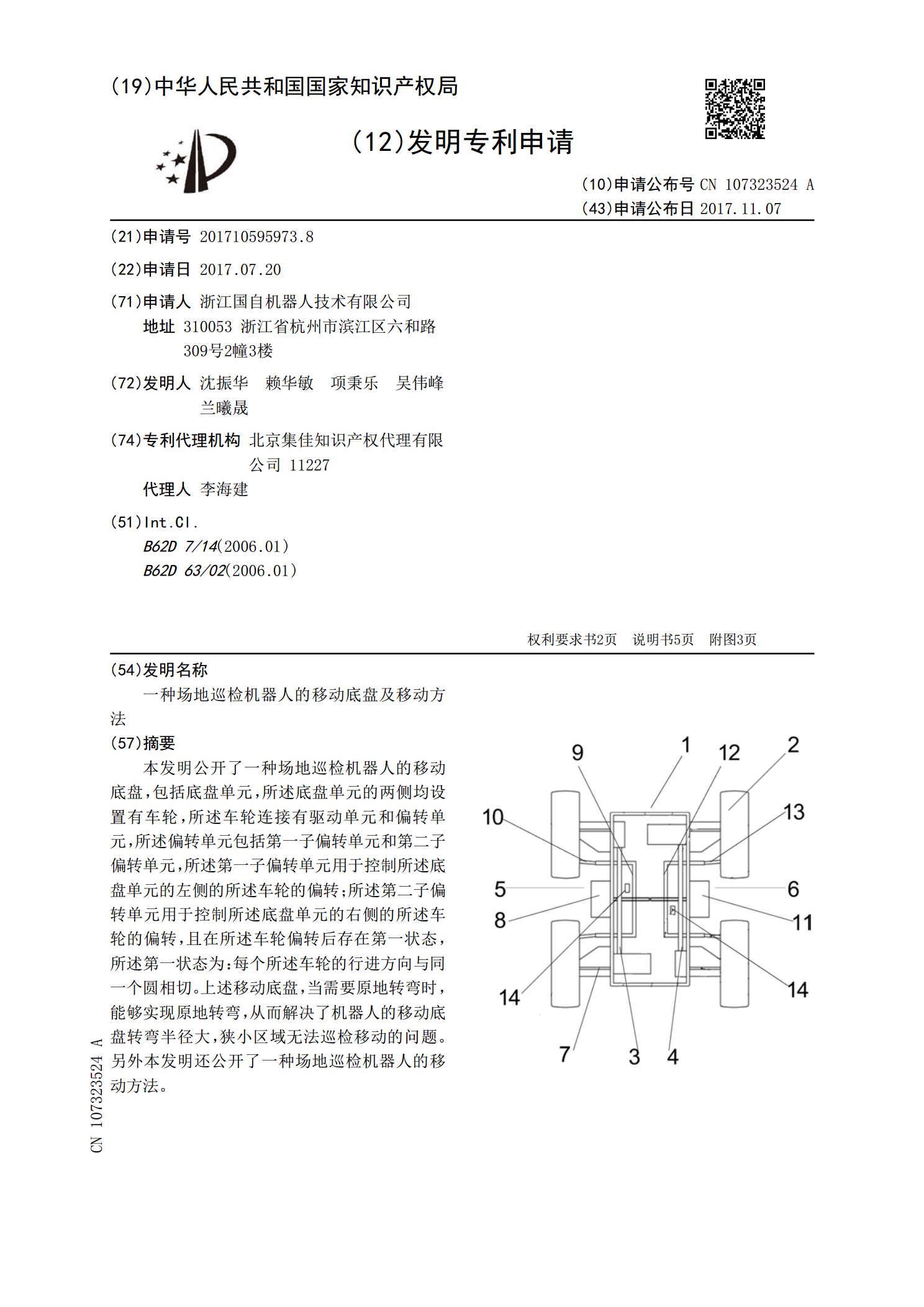
本发明公开了一种场地巡检机器人的移动底盘,包括底盘单元,所述底盘单元的两侧均设置有车轮,所述车轮连接有驱动单元和偏转单元,所述偏转单元包括第一子偏转单元和第二子偏转单元,所述第一子偏转单元用于控制所述底盘单元的左侧的所述车轮的偏转;所述第二子偏转单元用于控制所述底盘单元的右侧的所述车轮的偏转,且在所述车轮偏转后存在第一状态,所述第一状态为:每个所述车轮的行进方向与同一个圆相切。上述移动底盘,当需要原地转弯时,能够实现原地转弯,从而解决了机器人的移动底盘转弯半径大,狭小区域无法巡检移动的问题。另外本发明还公
一种场地巡检机器人的移动底盘及移动方法.pdf
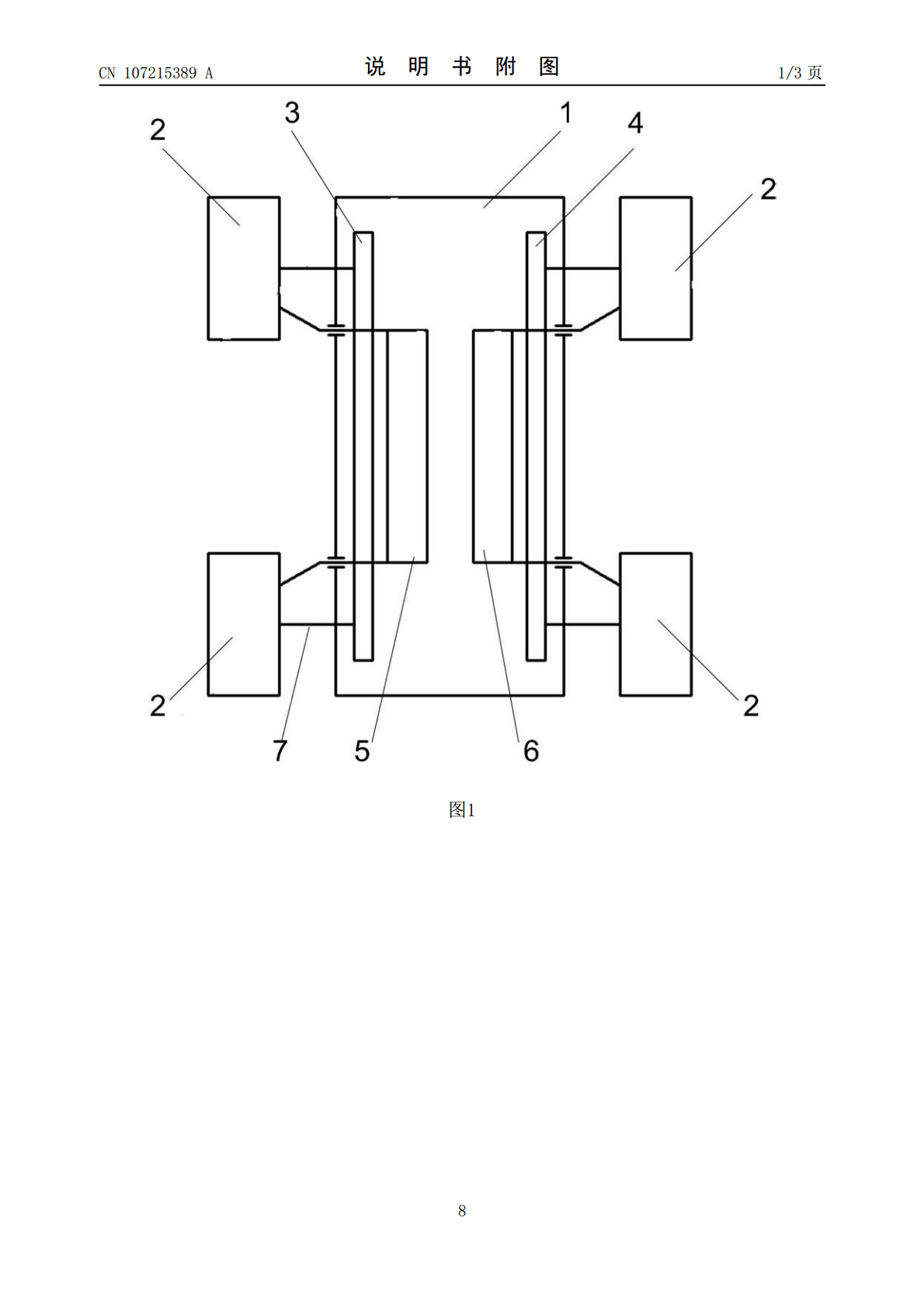
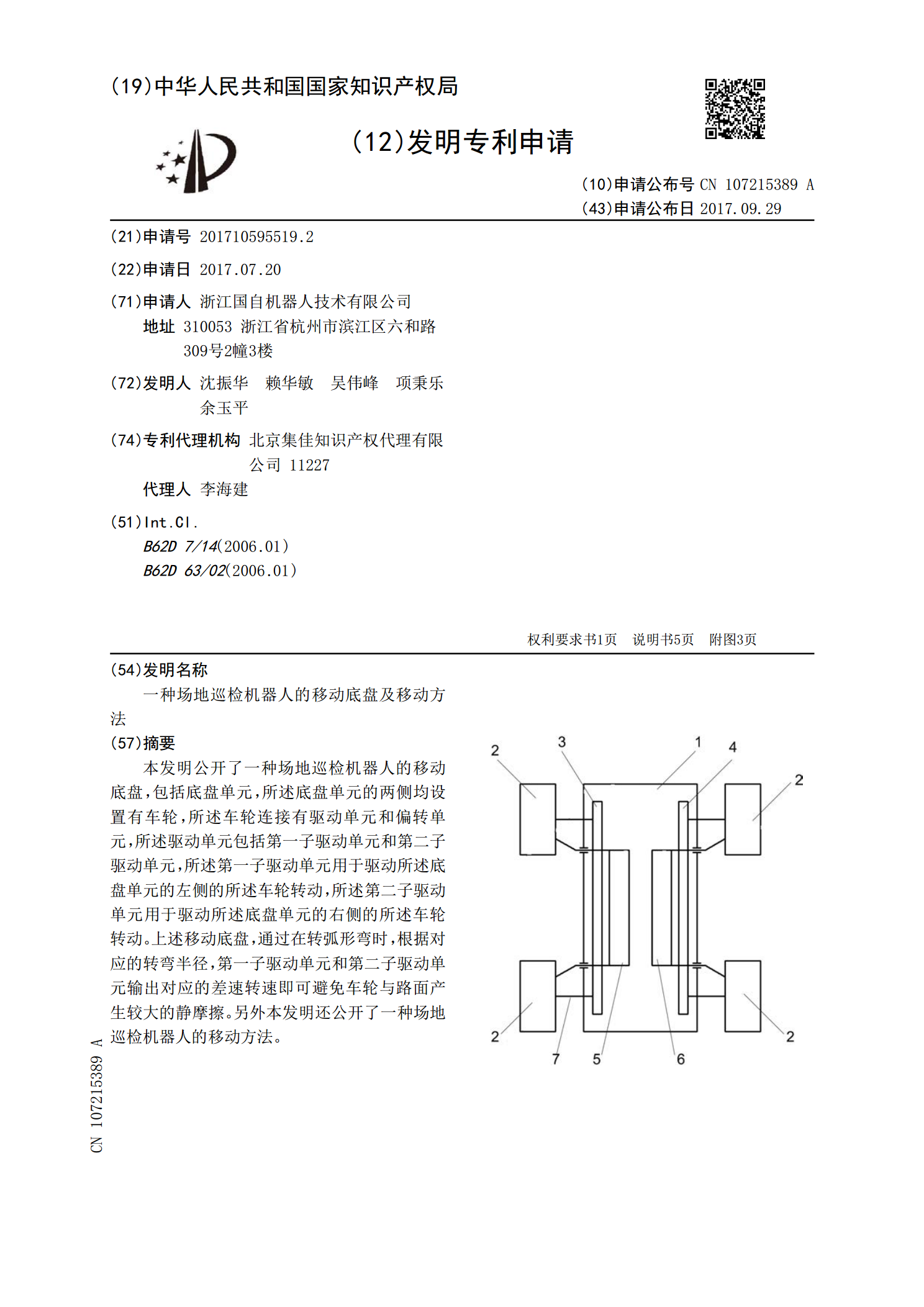
本发明公开了一种场地巡检机器人的移动底盘,包括底盘单元,所述底盘单元的两侧均设置有车轮,所述车轮连接有驱动单元和偏转单元,所述驱动单元包括第一子驱动单元和第二子驱动单元,所述第一子驱动单元用于驱动所述底盘单元的左侧的所述车轮转动,所述第二子驱动单元用于驱动所述底盘单元的右侧的所述车轮转动。上述移动底盘,通过在转弧形弯时,根据对应的转弯半径,第一子驱动单元和第二子驱动单元输出对应的差速转速即可避免车轮与路面产生较大的静摩擦。另外本发明还公开了一种场地巡检机器人的移动方法。
一种移动底盘、清洁机器人及移动底盘的移动控制方法.pdf
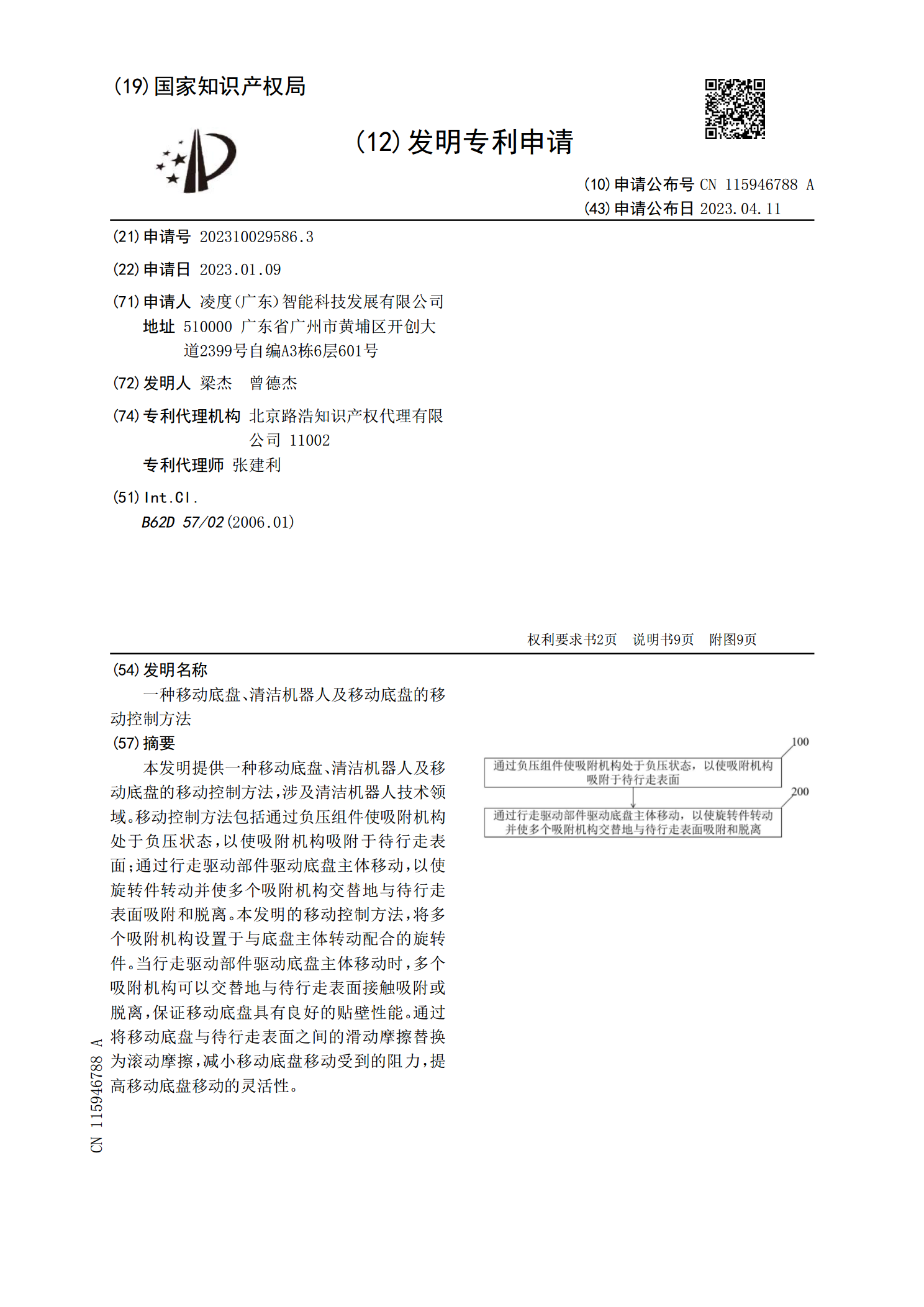
本发明提供一种移动底盘、清洁机器人及移动底盘的移动控制方法,涉及清洁机器人技术领域。移动控制方法包括通过负压组件使吸附机构处于负压状态,以使吸附机构吸附于待行走表面;通过行走驱动部件驱动底盘主体移动,以使旋转件转动并使多个吸附机构交替地与待行走表面吸附和脱离。本发明的移动控制方法,将多个吸附机构设置于与底盘主体转动配合的旋转件。当行走驱动部件驱动底盘主体移动时,多个吸附机构可以交替地与待行走表面接触吸附或脱离,保证移动底盘具有良好的贴壁性能。通过将移动底盘与待行走表面之间的滑动摩擦替换为滚动摩擦,减小移动

一种基于全转向技术的巡检机器人底盘以及移动方法.pdf
本发明属于智能机器人技术领域,具体涉及一种基于全转向技术的巡检机器人底盘以及移动方法,其中,巡检机器人底盘包括:底盘本体、安装于底盘本体上的信息处理系统以及与信息处理系统信号连接的巡检控制电路,所述底盘本体包括:高度可调节的升降支架模块,所述升降支架模块底部安装用于控制巡检机器人进行零半径转向以及平移的轮组模块,所述升降支架模块的顶部设置有上端连接台,其目的在于,能够实现巡检机器人原地零半径转向,横向以及斜向平移、以及高度升降等功能。
一种全向移动的底盘、全向移动的底盘系统及机器人系统.pdf
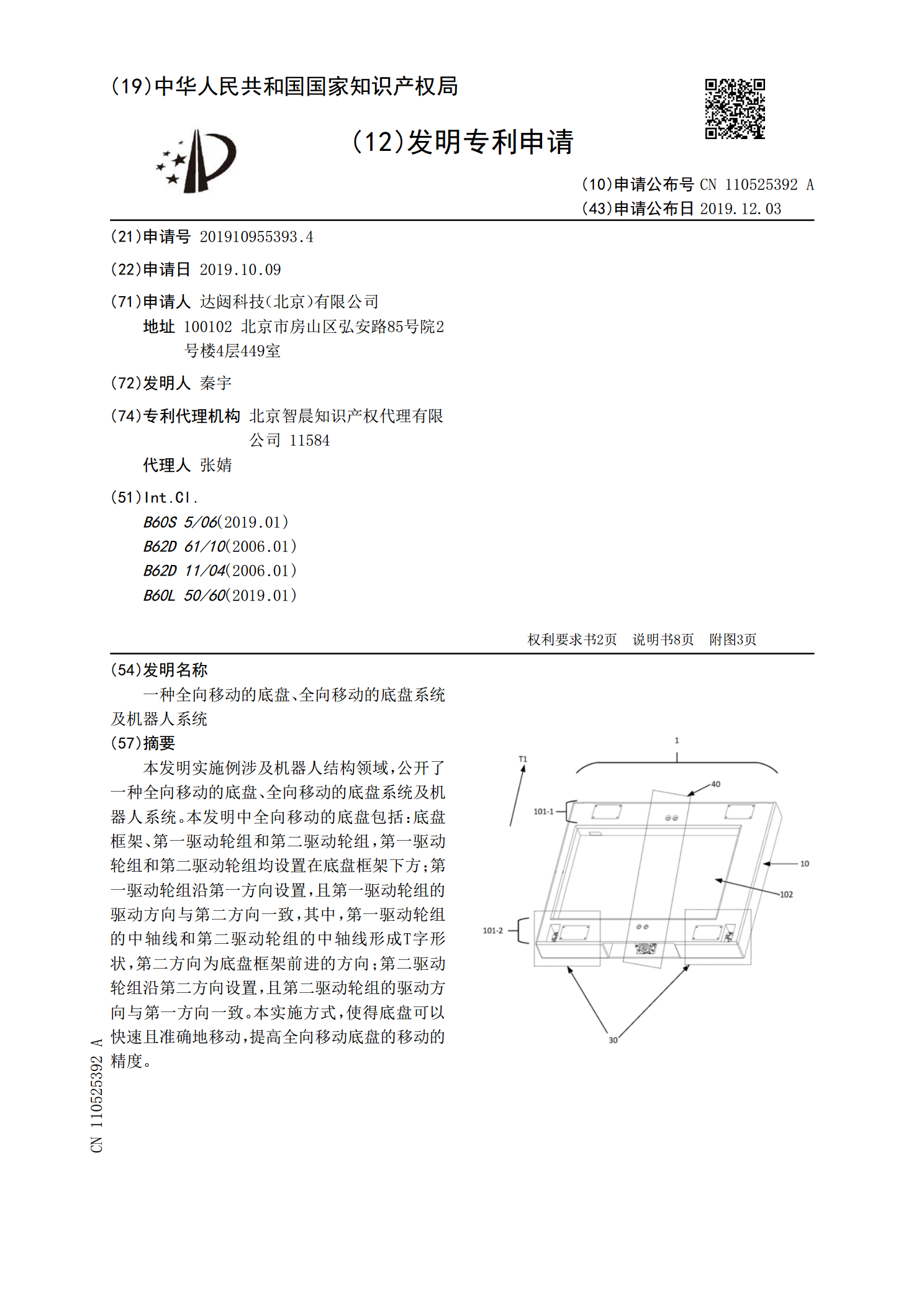
本发明实施例涉及机器人结构领域,公开了一种全向移动的底盘、全向移动的底盘系统及机器人系统。本发明中全向移动的底盘包括:底盘框架、第一驱动轮组和第二驱动轮组,第一驱动轮组和第二驱动轮组均设置在底盘框架下方;第一驱动轮组沿第一方向设置,且第一驱动轮组的驱动方向与第二方向一致,其中,第一驱动轮组的中轴线和第二驱动轮组的中轴线形成T字形状,第二方向为底盘框架前进的方向;第二驱动轮组沿第二方向设置,且第二驱动轮组的驱动方向与第一方向一致。本实施方式,使得底盘可以快速且准确地移动,提高全向移动底盘的移动的精度。