
应用于道路清扫车的自动驾驶系统及其控制方法、装置.pdf

雅云****彩妍


1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
应用于道路清扫车的自动驾驶系统及其控制方法、装置.pdf
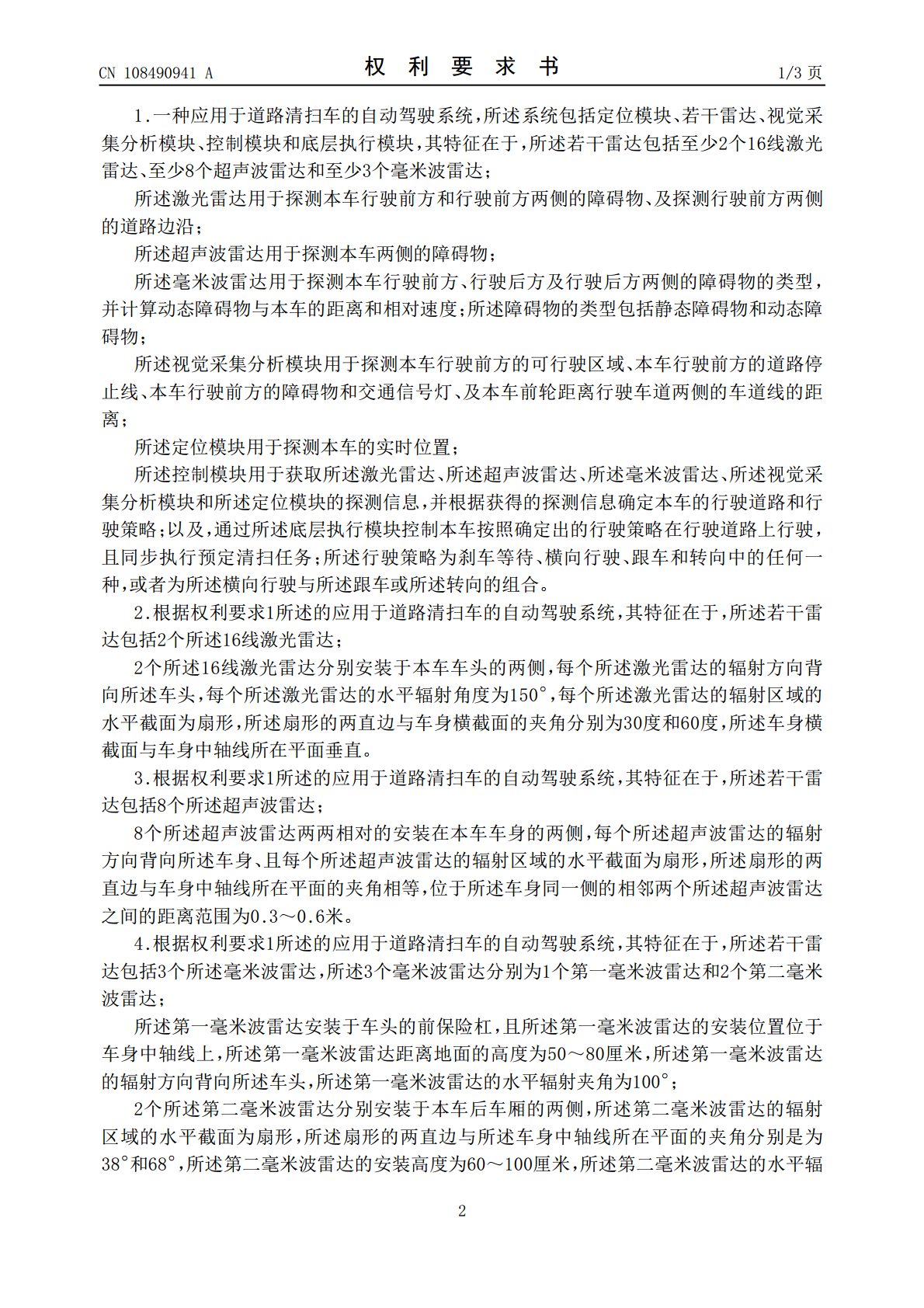
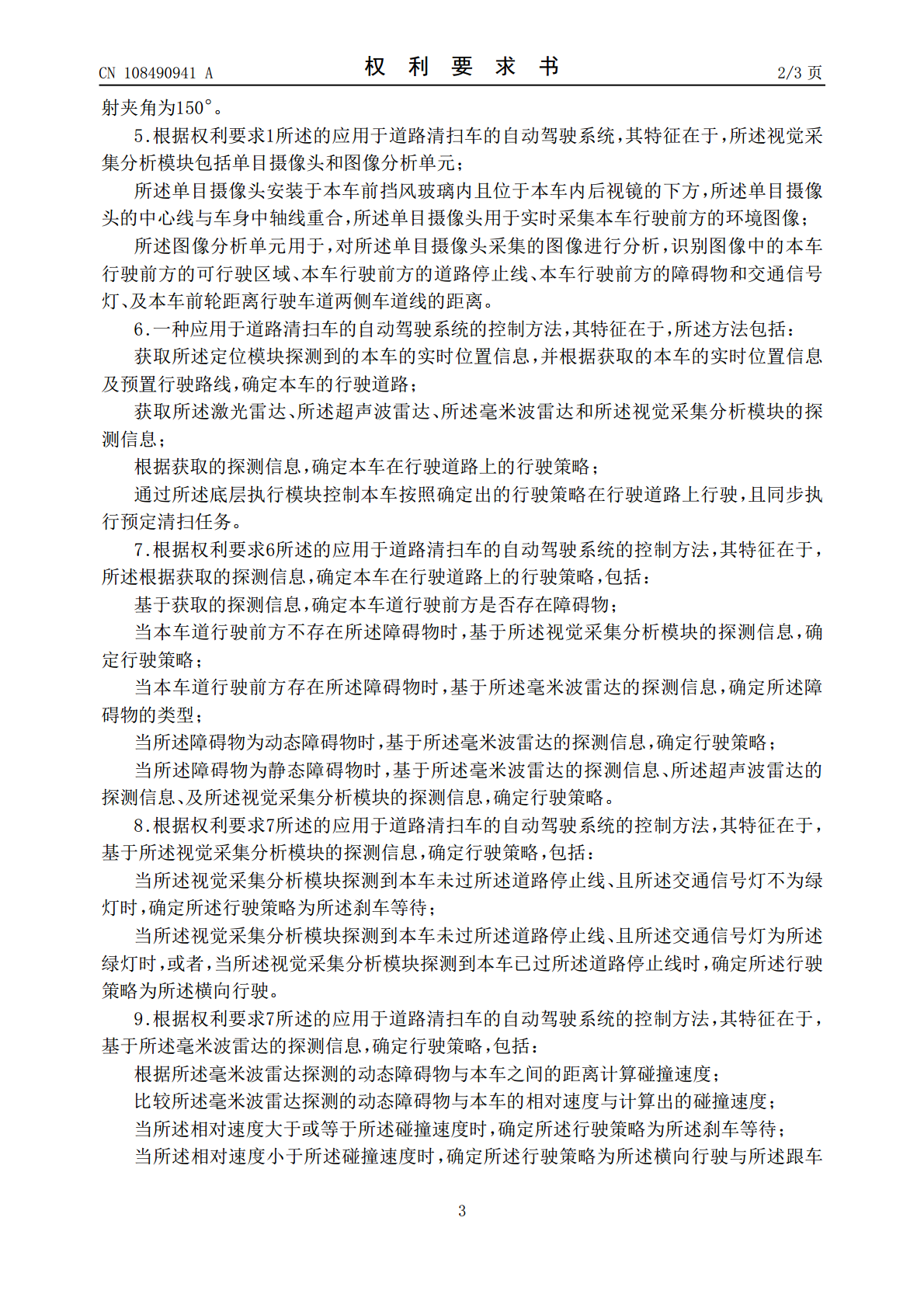
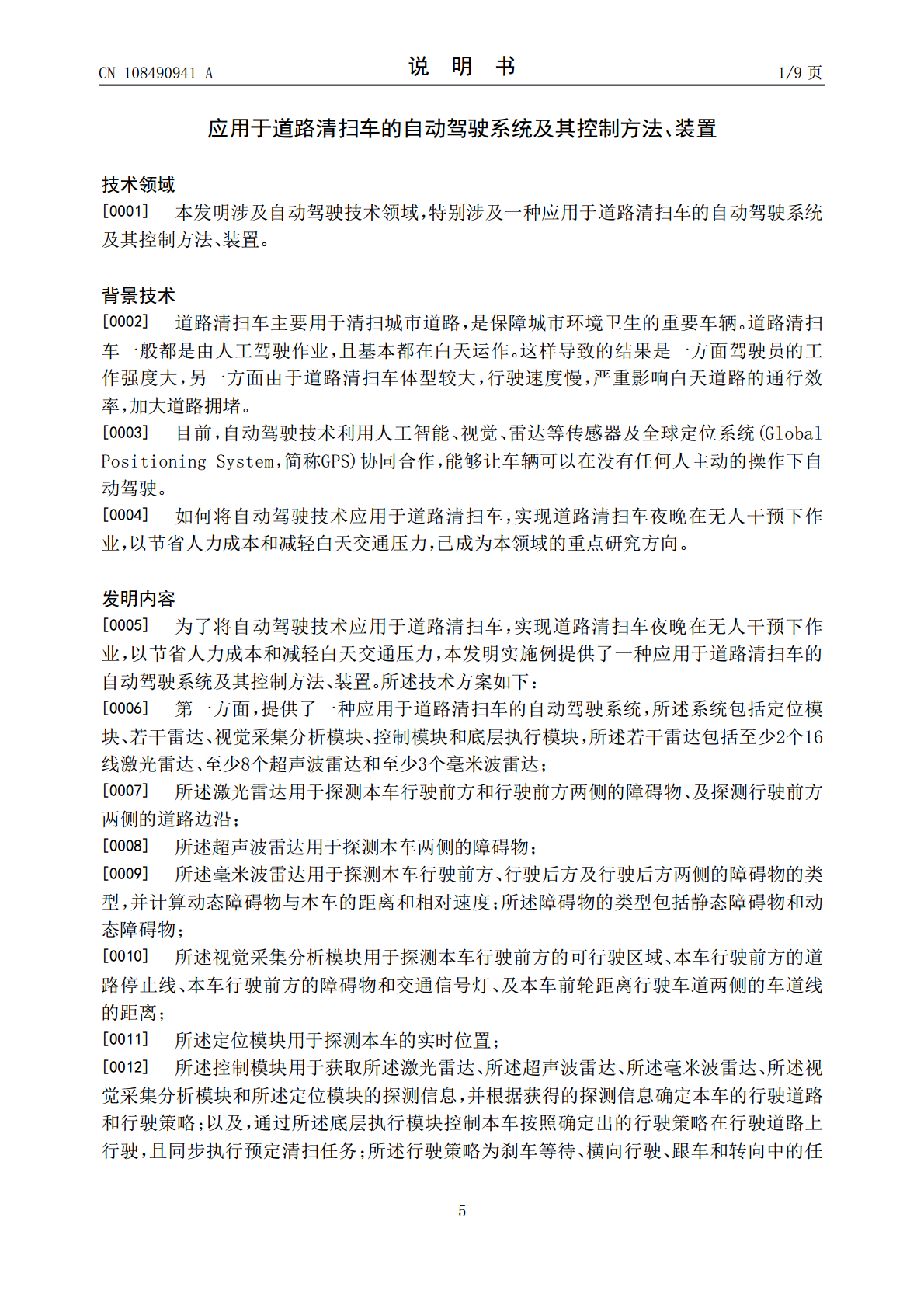
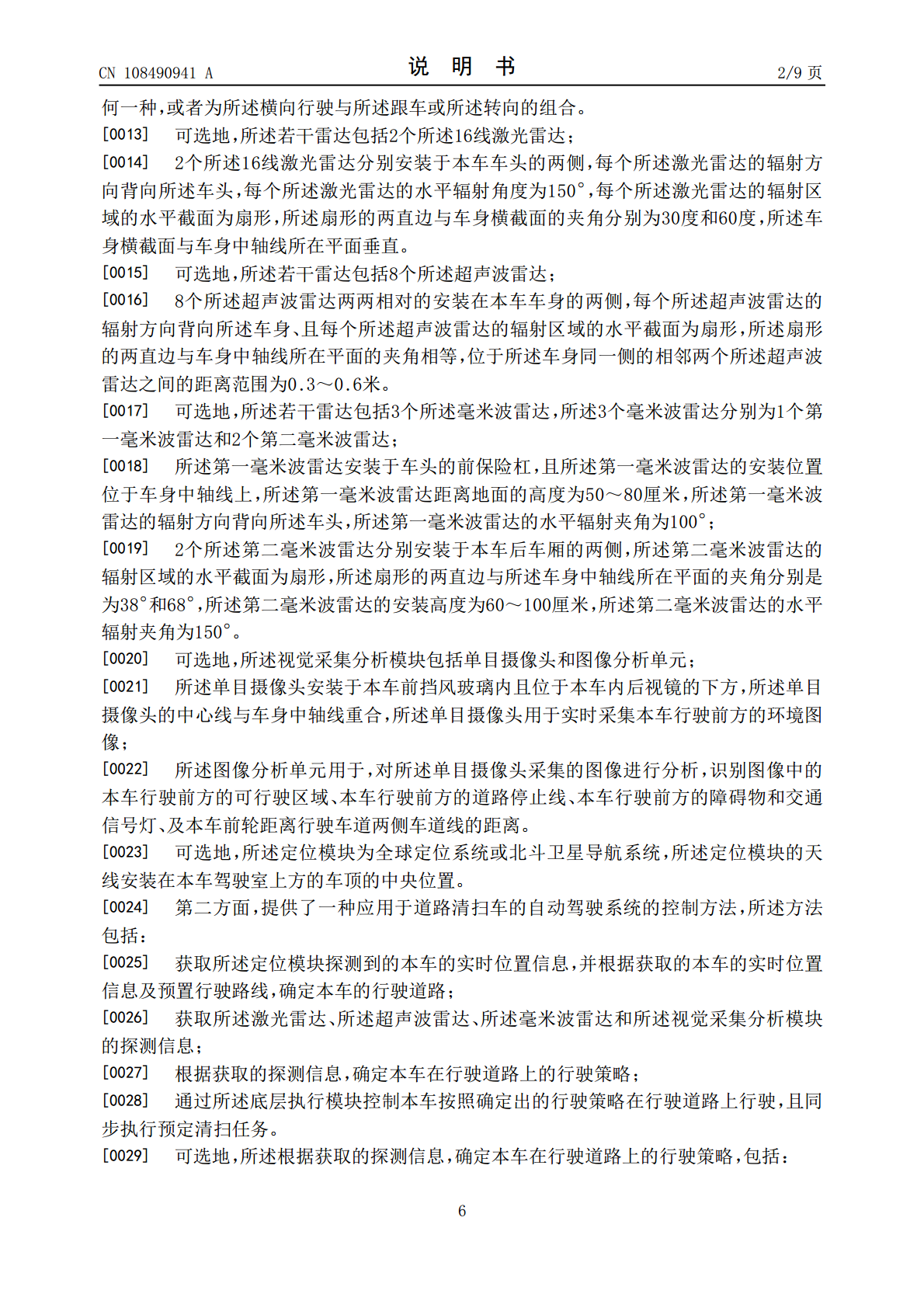
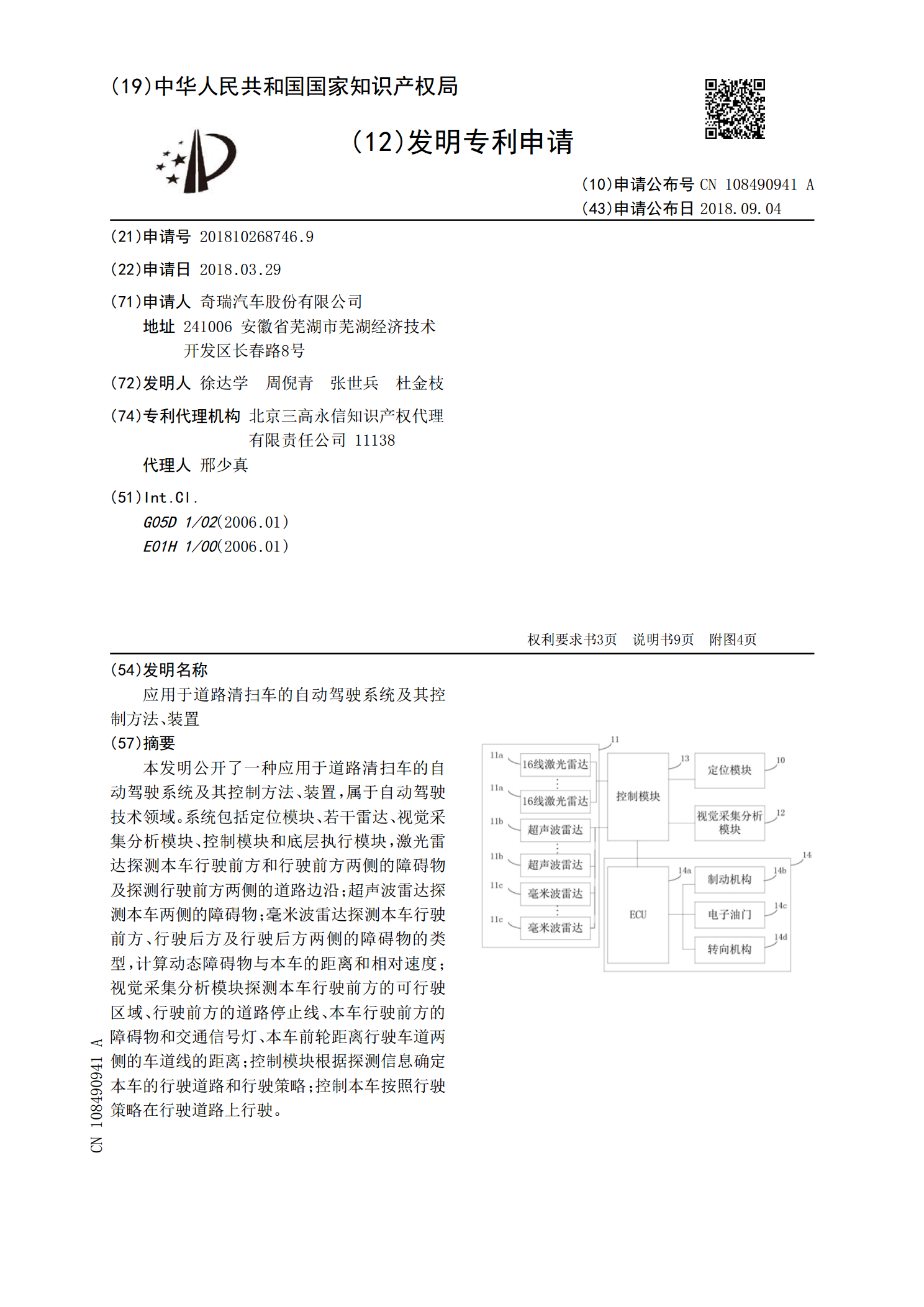
本发明公开了一种应用于道路清扫车的自动驾驶系统及其控制方法、装置,属于自动驾驶技术领域。系统包括定位模块、若干雷达、视觉采集分析模块、控制模块和底层执行模块,激光雷达探测本车行驶前方和行驶前方两侧的障碍物及探测行驶前方两侧的道路边沿;超声波雷达探测本车两侧的障碍物;毫米波雷达探测本车行驶前方、行驶后方及行驶后方两侧的障碍物的类型,计算动态障碍物与本车的距离和相对速度;视觉采集分析模块探测本车行驶前方的可行驶区域、行驶前方的道路停止线、本车行驶前方的障碍物和交通信号灯、本车前轮距离行驶车道两侧的车道线的距离
自动驾驶系统的控制装置和该装置的控制方法.pdf
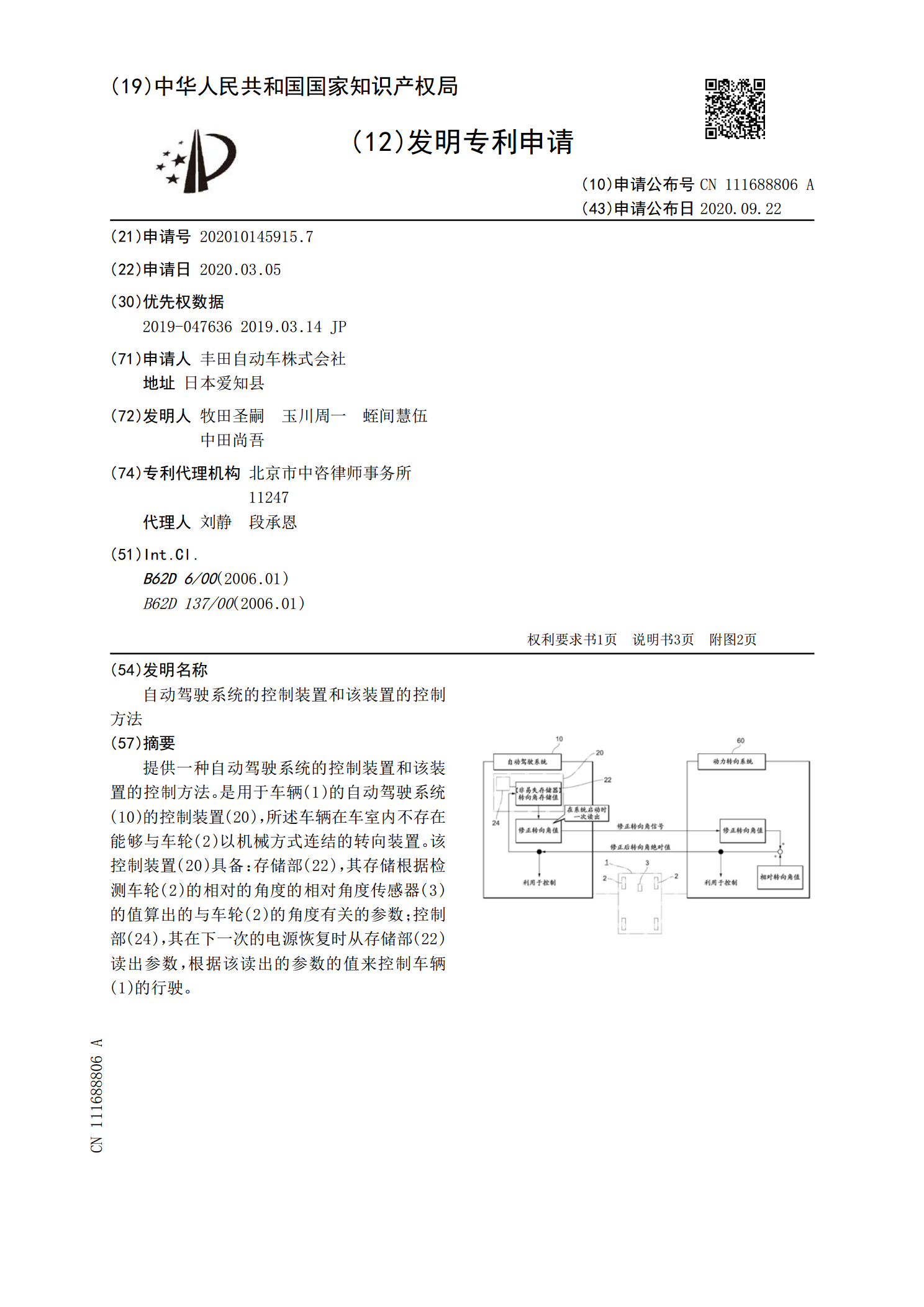
提供一种自动驾驶系统的控制装置和该装置的控制方法。是用于车辆(1)的自动驾驶系统(10)的控制装置(20),所述车辆在车室内不存在能够与车轮(2)以机械方式连结的转向装置。该控制装置(20)具备:存储部(22),其存储根据检测车轮(2)的相对的角度的相对角度传感器(3)的值算出的与车轮(2)的角度有关的参数;控制部(24),其在下一次的电源恢复时从存储部(22)读出参数,根据该读出的参数的值来控制车辆(1)的行驶。
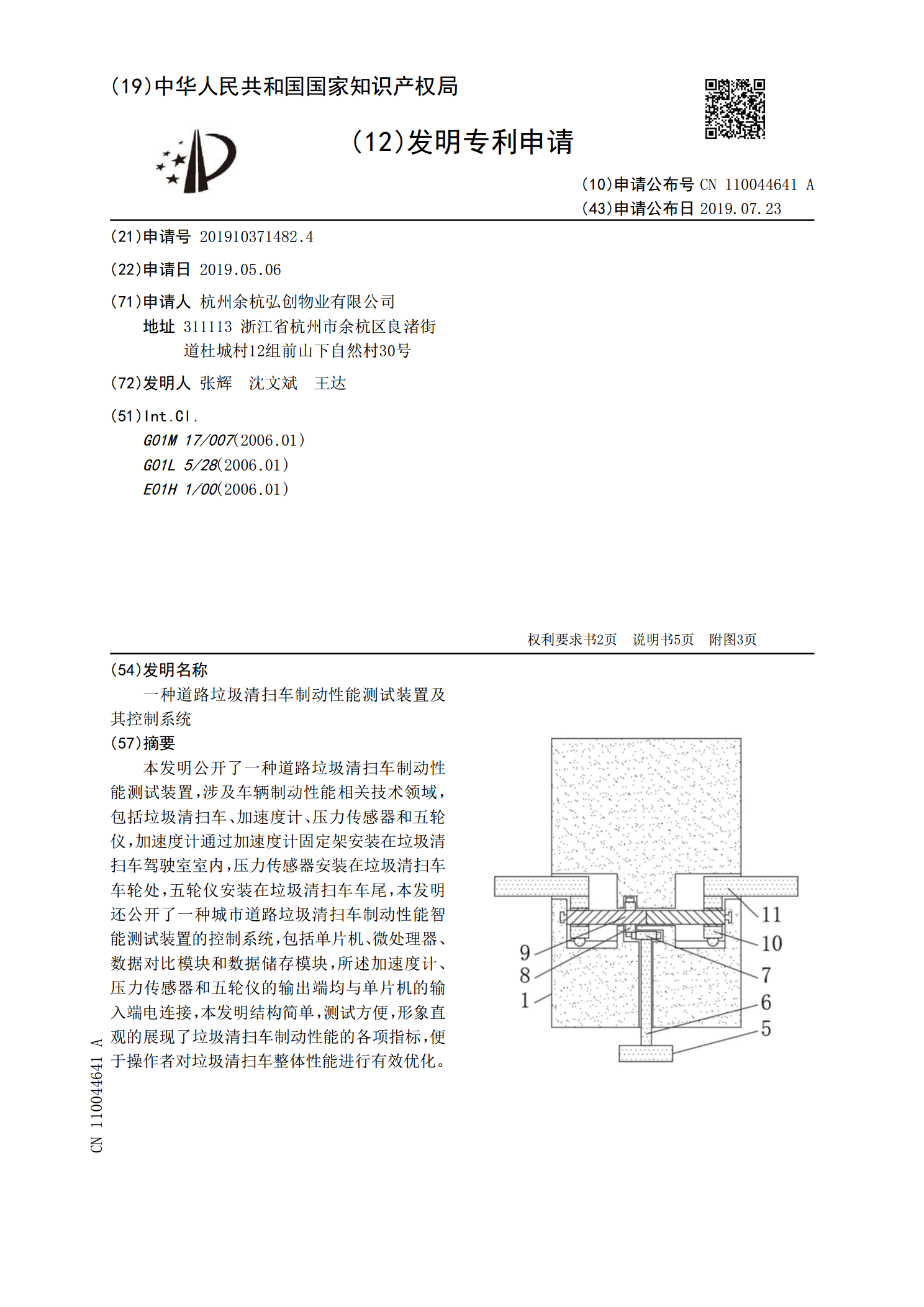
一种道路垃圾清扫车制动性能测试装置及其控制系统.pdf
本发明公开了一种道路垃圾清扫车制动性能测试装置,涉及车辆制动性能相关技术领域,包括垃圾清扫车、加速度计、压力传感器和五轮仪,加速度计通过加速度计固定架安装在垃圾清扫车驾驶室室内,压力传感器安装在垃圾清扫车车轮处,五轮仪安装在垃圾清扫车车尾,本发明还公开了一种城市道路垃圾清扫车制动性能智能测试装置的控制系统,包括单片机、微处理器、数据对比模块和数据储存模块,所述加速度计、压力传感器和五轮仪的输出端均与单片机的输入端电连接,本发明结构简单,测试方便,形象直观的展现了垃圾清扫车制动性能的各项指标,便于操作者对垃

自动驾驶控制装置、自动驾驶系统及自动驾驶农机.pdf
本申请提供一种自动驾驶控制装置、自动驾驶系统及自动驾驶农机。所述自动驾驶控制装置,包括:支座,支座的一侧凸出的设置有第一安装体;传动部,包括套体和滑动体,套体穿设在第一安装体上,套体的两端分别位于第一安装体的两侧,滑动体的两端分别伸出套体的两端,滑动体的第一端用于与待控制装置连接;直线驱动部,直线驱动部的驱动端设置有电磁铁,直线驱动部设置在第一安装体上;滑动配合部,包括滑轨和滑块,滑轨设置在支座上,滑块与直线驱动部的驱动端相对,滑块与滑动体的第二端连接;其中,直线驱动部能够驱动电磁铁向靠近或远离滑块的位置
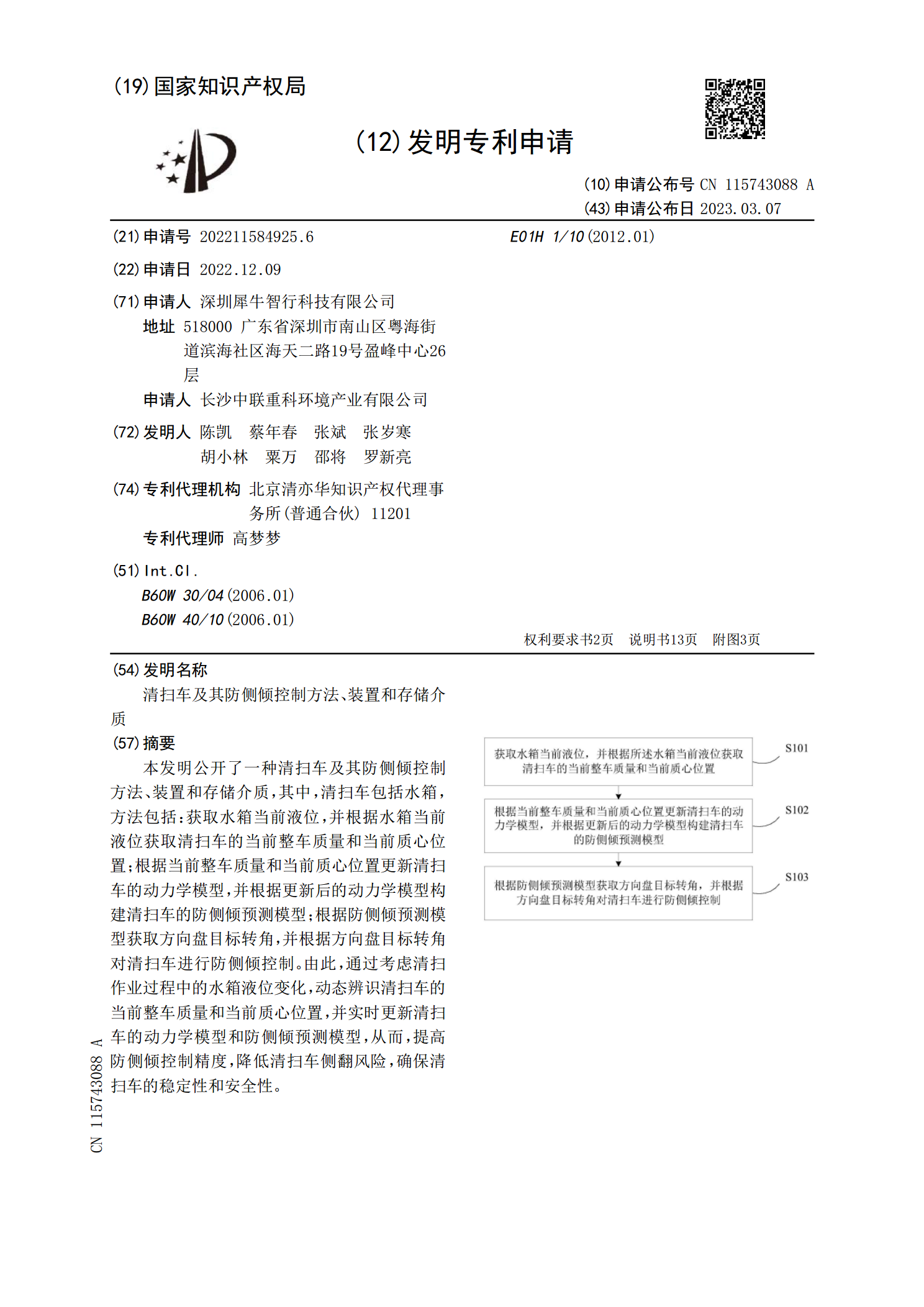
清扫车及其防侧倾控制方法、装置和存储介质.pdf
本发明公开了一种清扫车及其防侧倾控制方法、装置和存储介质,其中,清扫车包括水箱,方法包括:获取水箱当前液位,并根据水箱当前液位获取清扫车的当前整车质量和当前质心位置;根据当前整车质量和当前质心位置更新清扫车的动力学模型,并根据更新后的动力学模型构建清扫车的防侧倾预测模型;根据防侧倾预测模型获取方向盘目标转角,并根据方向盘目标转角对清扫车进行防侧倾控制。由此,通过考虑清扫作业过程中的水箱液位变化,动态辨识清扫车的当前整车质量和当前质心位置,并实时更新清扫车的动力学模型和防侧倾预测模型,从而,提高防侧倾控制精